涡旋压缩机转轴系统动平衡设计与仿真验证
2020-05-06 09:59
流体机械 2020年3期
(西京学院 机械工程学院,西安 710123)
0 引言
涡旋压缩机是第三代新型容积式压缩机,目前已被广泛应用于制冷、石油及化工等领域[1]。相对于传统的离心式和往复式压缩机,涡旋压缩机主要是利用内部封闭容积变化来实现气体的压缩,具有质量轻、效率高、体积小、运行平稳、振动及噪声小等诸多优点[2]。
近年来,随着数控制造技术和工艺水平的不断发展,新型涡旋压缩机的主轴转速已高达12 000 r/min,虽然在很大程度上提高了机器的运行效率,但同时也引发了一些新的问题和挑战,最典型的就是由偏心主轴产生的离心力所带来的不利影响[3]。在涡旋压缩机运转过程中,周期性离心力会随主轴转速的提高而不断增大,不仅会破坏动涡盘与静涡盘之间的径向密封性,而且有可能导致整机系统出现剧烈的振动及噪声,不利于涡旋压缩机的稳定运行和高速化发展。长期以来,如何提高涡旋压缩机的动平衡性能,使其能够适应更高的主轴转速,一直是业内人士和工程师研究的重要课题。本文通过结构分析、理论计算、CAD建模、动力学仿真及误差分析等一系列研究,成功实现了转轴系统的动平衡设计,为新型高速涡旋压缩机的研发提供了有力支持。
1 转轴结构
根据涡旋压缩机的功能原理及用途,为了使动涡盘与静涡盘之间的封闭容积腔按照月牙形规律变化,一般将其主轴设计为带有偏心半径r的阶梯轴[4-5]如图1所示,动涡盘安装于偏心轴之上,当涡旋压缩机运行时,动涡盘在偏心主轴产生的转矩驱动下相对静涡盘作平面运动,由此实现吸气、压缩和排气的作业过程。
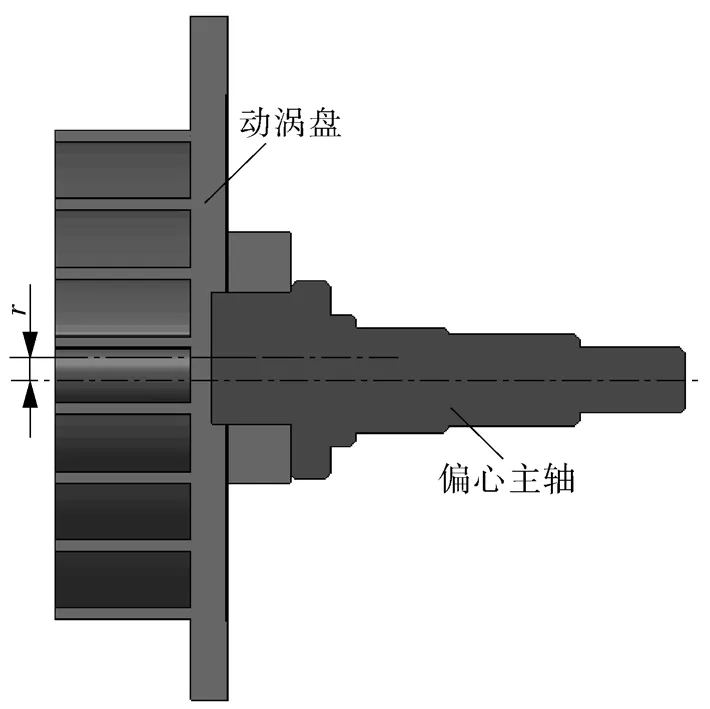
图1 偏心主轴结构
2 动平衡设计计算
2.1 原理分析
在对转子进行动平衡设计时,首先应该通过结构分析确定各不同回转平面内的偏心质量,然后根据偏心质量的分布情况,计算能够使转子达到动平衡所需的配重数量、大小及位置,并将其施加于转子结构之上以达到动平衡的设计目的[6-9]。
涡旋压缩机转子系统的偏心质量主要包括两部分,即动涡盘和偏心圆柱[10]。由图1所示偏心主轴结构可知,动涡盘与主轴偏心圆柱为同轴心装配,由于动涡盘的质量远大于偏心圆柱,且两者质心位置相距非常近,因此,为简化动平衡问题分析过程,近似认为动涡盘与偏心圆柱质心重合,并将其质量和以m记之。当动涡盘在偏心主轴驱动下以等角速度ω做回转运动时,转轴系统会产生一个离心惯性力F,见图2,其中,L1=75 mm,L2=50 mm,r=8.5 mm,r1=60 mm,r2=67.5 mm。
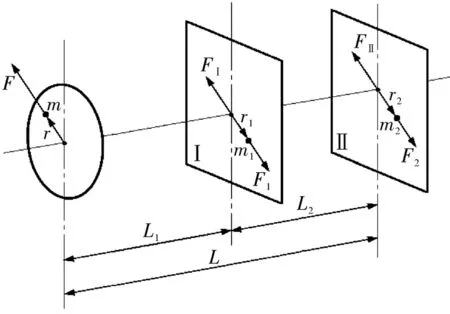
图2 动平衡设计原理
由理论力学可知,一个力可以分解为与其相平行的2个分力[6]。因此,根据图2所示转轴结构动平衡设计原理,选定2个平衡基面Ⅰ和Ⅱ作为配重的安装位置,并将F分解至平面Ⅰ和Ⅱ内,即FⅠ,FⅡ。显然,为使转轴系统达到动平衡状态,只需在平面Ⅰ和Ⅱ内分别施加1个适当的平衡质量m1,m2,以此产生2个相反方向的离心惯性力F1,F2,最终使2个平面内的的离心惯性力之和等于零即可。
2.2 配重计算
根据静力平衡条件,在平衡基面Ⅰ和Ⅱ中存在以下的平衡方程:

式中 F1,F2—— 平衡质量 m1,m2产生的离心惯性力。
根据转子动力学理论及图2可知,F1,F2可表示为:
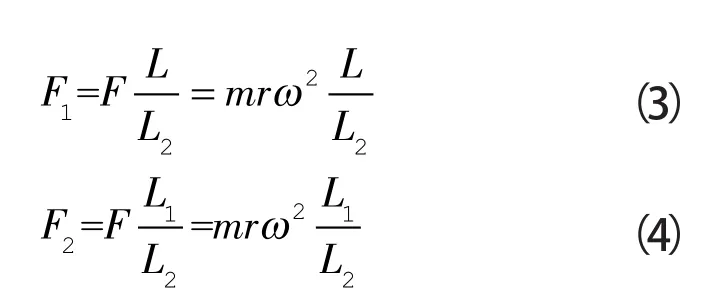
将式(3)代入静力平衡方程(1),消去ω2可得:

涡旋压缩机主轴材料采用45钢,其质量密度ρ=7 800 kg/m3[11]。偏心圆柱底面直径d=50 mm,圆柱高h=30 mm。动涡盘的形状和尺寸一定,材料采用Cu2Cr2Mo,直接在CAD环境中测出其质量为8.12 kg。动涡盘与偏心圆柱的总质量计算式为:
代入数值计算得m=8.58 kg。在此基础上,通过式(5)计算出平衡基面Ⅰ内的配重m1=3.04 kg。同理,可计算出平衡基面Ⅱ内的配重m2=1.62 kg。
2.3 平衡铁设计
根据配重质量m1、m2,分别在平衡基面Ⅰ和Ⅱ内设计一个扇形平衡铁,以此来抵消分解力FⅠ,FⅡ。基面Ⅰ内的扇形截面形状如图3所示,其截面面积s1=0.013 m2,质量密度ρ1=7 200 kg/m3(灰铸铁材质),由式(7)计算出平衡铁的厚度t1=0.032 m。同理,测量和计算出基面Ⅱ内的平衡铁截面面积s2=0.014 m2、厚度t2=0.016 m。根据平衡铁结构几何参数,在CREO环境下建立其三维实体模型,如图4所示。
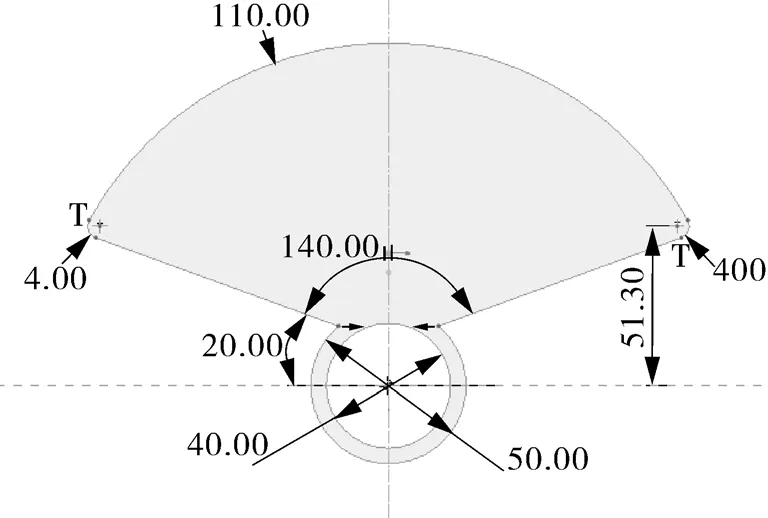
图3 扇形截面设计

图4 平衡铁三维CAD模型
3 仿真验证
3.1 模型构建
根据涡旋压缩机结构和功能原理,在CREO环境下建立转轴系统仿真模型。在偏心主轴上装配动涡盘和平衡铁时,按照动平衡设计结果确定平衡铁的安装位置和初始相位。通过接口程序将三维CAD模型送入ADAMS/View环境,分别定义各零部件的材质属性和约束条件[12],建立如图5所示的转轴系统仿真模型。
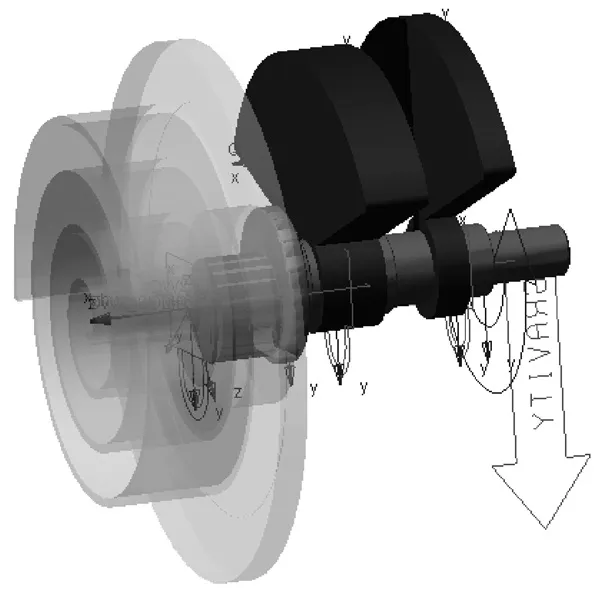
图5 转轴系统仿真模型
3.2 动力学仿真
为偏心主轴设置旋转驱动,令电动机输入转速为3 600 r/min,即涡旋压缩机主轴每秒转动为60转,将其转化为弧度可得到主轴角速度ω=377 rad/s。仿真时间设置为0.1 s。考虑重力影响,运行动力学仿真计算过程。通过数据后处理获得平衡铁质心位移曲线,如图6所示,分析可知,平衡铁Ⅰ和Ⅱ的质心位移按照正弦简谐规律变化,且曲线初始相位一致,其位移幅值分别为60和67.5 mm,与平衡铁质心回转半径设计参数r1,r2一致。
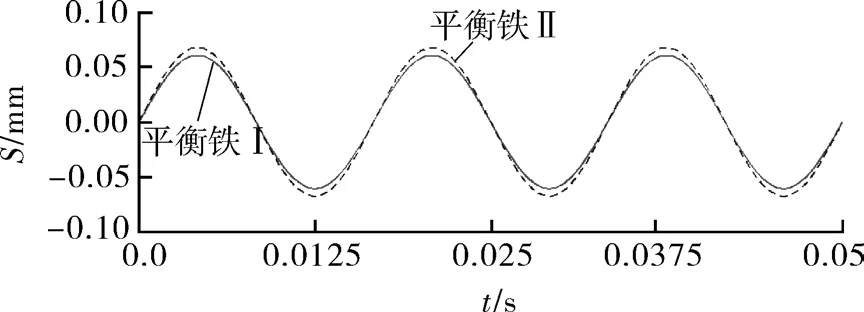
图6 平衡铁质心位移曲线
基面Ⅰ和基面Ⅱ位置的平衡铁速度仿真曲线如图7,8所示,由图分析可知,当转轴系统以3 600 r/min运转时,平衡铁质心速度的大小和方向均随时间呈周期性变化,且曲线光滑、无明显波动现象,符合转子动力学设计要求和速度规律。
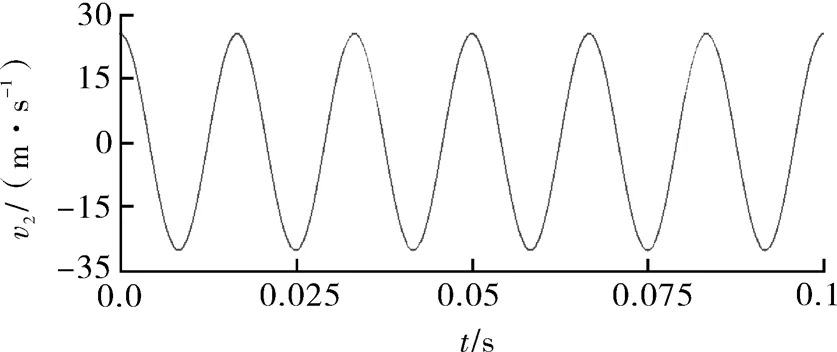
图7 平衡铁Ⅰ质心速度
图8 平衡铁Ⅱ质心速度
由图7曲线可知,平衡铁Ⅰ质心速度幅值v1=22.66 m/s。离心力计算式为:

代入各参数计算出平衡铁Ⅰ的离心力仿真结果F1s=26 016 N;由图8获得平衡铁Ⅱ质心速度幅值v2=25.46 m/s,同样的方法,计算出平衡铁Ⅱ的离心力仿真结果Fs2=15 557 N。由上可知:F1s>Fs2,可见,在对转轴系统进行动平衡配重设计时,基面Ⅰ位置平衡铁抵消的分解力显然更大。
3.3 误差分析
根据动平衡理论,将设计参数 m1,m2,r,ω,L,L1及L2分别代入式(3)和(4),计算出平衡铁Ⅰ和Ⅱ的离心惯性力设计值:F1=25 914 N,F2=15 548 N。为了验证动平衡设计的准确性,对离心力设计值F1和仿真值F1s进行误差分析。按照式(8)计算出平衡铁Ⅰ的设计误差Δ1=0.39%,同样的方法计算出平衡铁Ⅱ的设计误差Δ2=0.06%。误差产生的原因,主要是由于建模和仿真过程未考虑零部件的柔性形变,这也是ADAMS/View多刚体动力学仿真的局限所在。
分析误差计算结果可知,动平衡理论设计值与动力学仿真值之间的误差(Δ1、Δ2)非常之小,误差范围仅在0.06%~0.39%之间。
根据工程设计规范和经验,机械设计误差在实际当中是难以避免的,而这种极小误差是符合机械精度设计要求的[13-14]。通过误差分析,验证了涡旋压缩机转轴系统设计的正确性,说明动平衡理论计算结果准确、设计方案合理可行。
4 结语
工程设计经验和生产实践表明,高速转子结构必须具备良好的动平衡性能。通过涡旋压缩机转轴系统的动平衡设计计算,确定了平衡铁的形状、质量及分布位置,有效抵消了主轴转动过程中产生的离心惯性力。动力学仿真结果验证了动平衡设计方案的正确性,为涡旋压缩机系统的动平衡设计与性能改进提供了重要技术参考。
猜你喜欢
一重技术(2021年5期)2022-01-18
上海大中型电机(2021年1期)2021-06-09
冶金设备(2019年6期)2019-12-25
治淮(2019年11期)2019-12-04
治淮(2019年4期)2019-05-16
山东冶金(2019年2期)2019-05-11
治淮(2018年7期)2018-01-29
制造技术与机床(2017年5期)2018-01-19
电脑爱好者(2016年23期)2017-01-05
治淮(2016年2期)2016-09-01