
浅析自动驾驶分类及发展前景
2020-05-06 09:09张艳徐顺蔺春明赵玺徐业翔彭宏伟
汽车实用技术 2020年6期
张艳 徐顺 蔺春明 赵玺 徐业翔 彭宏伟
摘 要:文章结合《汽车驾驶自动化分级》标准,简述了标准分级的定义,并根据实际应用,与具体功能、配置对应起来,论述自动驾驶分类及发展前景。
关键词:驾驶辅助;自动驾驶
中图分类号:V323 文献标识码:A 文章编号:1671-7988(2020)06-40-03
Abstact: Combined with the standard of automobile driving automation classification, this paper briefly describes the definition of the standard classification, and discusses the classification and development prospect of automatic driving according to the practical application and the specific function and configuration.
Keywords: Driving Assistance; Autonomous Driving
CLC NO.: V323 Document Code: A Article ID: 1671-7988(2020)06-40-03
引言
2020年3月9日,工信部官网上挂出《汽车驾驶自动化分级》推荐性国家标准报批稿,拟于2021年1月1日开始实施。 这是关于自动驾驶汽车的分级第一次有国家标准的形式明确。但用户在选购车辆时并不能直接的判断出来自己购买的汽车到底具备L级级别的功能,所以将标准的分级与具体功能、配置对应起来,谈一谈自动驾驶的分类与发展前景。
1 自动驾驶的概念及意义
1.1 自动驾驶汽车
自动驾驶汽车是指通过搭载先进传感器等装置,运用人工智能等新技术,具有自动驾驶功能,逐步成为智能移动空间和应用终端的新一代汽车。又称为智能汽车或者智能网联汽车等。
1.2 自动驾驶的意义
自动驾驶汽车使用视频摄像头、雷达传感器以及激光测距器来了解周围的交通状况,并通过一个详尽的地图对前方的道路进行导航。因而,其交通事故发生率可以极大的降低。自动驾驶汽车的行驶模式可以更加节能高效,对交通拥堵及空气的污染将得以减弱。
2 自动驾驶的标准分级
此标准中,基于自动执行动态驾驶任务的程度,在驾驶任务中的角色分配及条件限制,将自动驾驶等级分成 0~5 级。
2.1 0级驾驶自动化(应急辅助)
车辆的自动驾驶系统虽然不能控制汽车的转向或加减速,但是具备一定的路况识别和反应能力,比如能够在危险出现的时候提醒驾驶员并能辅助或短暂介入辅助驾驶员驾驶。
如车道偏离预警、前碰撞预警、自动紧急制动等都属于自动驾驶应急辅助功能范畴(定速巡航、电子稳定性控制因不具备自动探测相应能力,不属于自动驾驶应急辅助功能)。
2.2 1级驾驶自动化(部分驾驶辅助)
1级自动驾驶汽车和0级自动驾驶汽车一样,都属于有限制条件的自动驾驶,不同之处在于,1级中车辆能实现小部分功能的自动化操作,例如自动加减速或转向。一般来讲自适应巡航、自动刹车、车道保持辅助等这些功能就属于1級自动驾驶的范围。
2.3 2级驾驶自动化(组合驾驶辅助)
2级别比1级别的自动化程度高很多,2级自动驾驶包含的功能有:acc自适应巡航、主动车道保持、自动泊车、路牌识别、自动变道等功能。
目前而言,我们使用的2级别自动驾驶其实只能算是“驾驶辅助系统”,它还完全无法离开人工的干预。因此在使用的时候还是要我们随时注意着道路的变化。
2.4 3级驾驶自动化(有条件自动驾驶)
到3级,自动驾驶系统在所规定的运行条件下,车辆本身就能完成转向和加减速,以及路况探测和反应的任务。能够在或长或短的时间段内代替驾驶者承担操控车辆的职责,但是仍需驾驶者对驾驶活动进行监控。能够有条件实现TJP交通拥堵辅助功能目前整体技术处于2级到3级转变阶段。
2.5 4级驾驶自动化(高度自动驾驶)
4级自动驾驶汽车仍属于有限制条件的自动驾驶,但是汽车的方向和加减速控制,路况观测和反应,以及汽车故障时的接管任务都能够由自动驾驶系统完成,不需要人类参与。而按照这一界定,无人出租车便属于4级自动驾驶。
2.6 5级驾驶自动化(完全自动驾驶)
5级自动驾驶汽车和4级自动驾驶汽车能够实现的基本功能相同,但5级自动驾驶汽车不再有运行条件的限制(商业和法规因素等限制除外),同时自动驾驶系统能够独立完成所有的操作和决策。
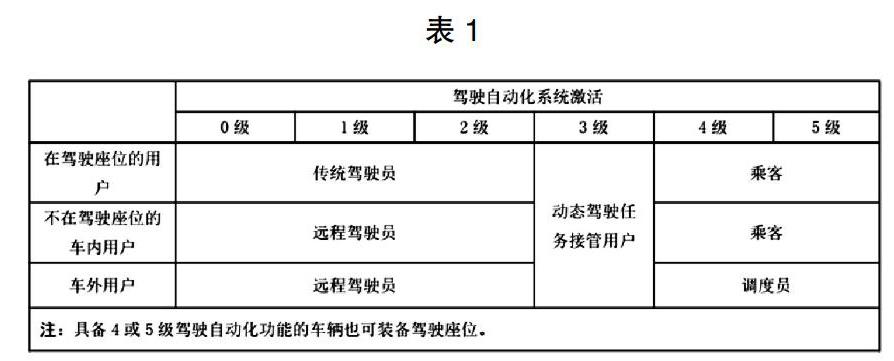
在高级别的自动驾驶中,驾驶员的身份逐渐向乘客转变。在0级至2级自动驾驶中,监测路况并做出反应的任务由驾驶员和系统共同完成,4至5级自动驾驶中,驾驶员完全转变为乘客的角色,车辆甚至可以不再装备驾驶座位。
驾驶自动化系统激活后用户的角色如下表1:
3 常见的驾驶辅助系统
3.1 车道偏离预警功能(LDW)
功能:对在不经意间离开标记车道发出警告
原理:系统通过前视摄像头监控路面车道线,当系统监控到车辆在无意识偏离车道,即将压线前,系统会发出报警信号,通过仪表的声音和视觉预警对驾驶员进行警示,以提示驾驶员尽快接管车辆方向盘。
3.2 前向碰撞预警功能(FCW)、行人碰撞预警功能(PCW)
通过前视摄像头,监控道路车辆信息,以识别前方车辆,在即将碰撞前的3~4秒,系统将发出两级报警信息,激活仪表报警图像及声音,提醒驾驶员尽快接管车辆,采取避让措施。
摄像头同时可以识别行人特征,在碰撞前发出预警信息,实现行人碰撞预警PCW。
3.3 智能大灯控制
功能:确保最佳道路照明。
原理:智能大灯控制可以借助一个摄像头测量环境亮度,并识别到前方行驶车辆或迎面来车及其距离。这些数据被用来实现各种灯光功能。
近光灯激活功能可以根据当前的光线情况自行打开或关闭车辆的近光灯。
远光灯激活功能可以让驾驶员尽可能频繁地使用远光灯行车,而无需手动打开或关闭。如果该功能未识别到其他车辆,就会激活远光灯。如果该功能探测到其他车辆,则会关闭远光灯。
根据视频数据还可以自动调节近光灯或远光灯的照明范围。自适应近光灯控制功能可以将近光灯的水平高度与车道轮廓持续匹配。尤其是在上坡或崎岖的路面上时,总是能够保持良好的车道照明,而不会让其他驾驶员眩目。
3.4 自适应巡航控制(ACC)
功能:帮助驾驶员调整车速,并与前方车辆保持安全距离。
原理:在行驶过程中,ACC保持由驾驶员预先设定的车速,通过自行收油门、制动或加速而与变化的交通状况相适应。ACC的另一版本“停走型ACC(Stop&Go)”还能将车辆自行制动到停止,并在驾驶员确认后自动重新启动车辆。
配置该功能的情况下,自适应巡航激活过程中,如前方有车辆低于自车车速,系统可自动控制本车减速以跟随前方车辆,并在前方无车时自动提速至巡航车速。可在一定条件下完全解放双脚。
3.5 疲劳驾驶监控预警_逻辑型(DFM)
功能:驾驶员处于疲劳状态时提供警报,从而防止或减少由于疲劳驾驶引起的交通事故。
原理:根据驾驶行为,在车辆压线行驶或突变转向等异常行驶事件频繁发生时,系统会通过内部算法逐渐累计疲劳值,并在疲劳值达成阈值时,通过声光报警,提示驾驶员停车休息。
当连续驾车超出4个小时,系统也会通过声光报警,提示休息。
3.6 车道保持辅助
功能:主动帮助驾驶员保持在标记的车道中。
原理:车道保持辅助同样使用摄像头探测车辆前面的车道标记。如果该功能识别到与车道边界线的距离小于定义的最小距离,车道保持支持系統就会温和但明显地将车辆转向反方向,从而使车辆保持在车道内。驾驶员可以随时无视该功能而越权控制,并对车辆操控负责。如果驾驶员在变换车道或转弯时打开转向信号灯,则该功能不进行干预。
3.7 车道变道辅助
功能:在变道时对碰撞危险做出警告。
原理:该系统以监控车辆侧面和斜后方区域的雷达传感器为基础。如果系统探测到盲区中的车辆或从后方高速驶来的车辆,则以视觉形式警告驾驶员,例如在车侧后视镜中显示一个发光符号。在驾驶员因需要变道而打开了转向灯的情况下,该系统还能发出听觉和/或触觉警告,提醒驾驶员注意潜在的危险。
3.8 自动紧急制动功能(AEB)
功能:在即将发生追尾事故的情况下,帮助驾驶员防止事故的发生或者至少降低事故的严重程度。
原理:利用雷达侦测和前车的距离,根据两车的相对速度的碰撞风险做出警报,如果做出警报后驾驶者并无任何反应,当安全距离小于范围内,AEB系统就会启动,自动介入汽车的刹车系统,以减轻或避免碰撞。
为此,系统持续计算汽车为避免碰撞所需的减速度。如果系统识别到驾驶员的制动强度不够,则会增加制动压力使车辆尽可能在障碍物前停止,以最大限度地避免碰撞。
如果驾驶员未做出任何反应并且系统预估碰撞不可避免,则会触发完全制动,以尽可能地减轻碰撞后果。
除上述常见辅助功能外,还有车距监控预警功能,自动泊车辅助系统,刹车辅助系统,倒车辅助系统,行车辅助系统等。自动驾驶技术的研发在近几年来进行得如火如荼,目前在市面上的部分车型已经搭载了2级别的自动驾驶系统。
4 发展前景
自动驾驶汽车(智能汽车)搭载先进传感器等装置,运用人工智能等新技术,具有自动驾驶功能,逐步成为智能移动空间和应用终端等新一代汽车。
在提升传统汽车的智能化技术应用同时,面临内核需要重新定义的挑战,智能汽车需要从“机械产品”向“智能终端”的系统重塑,打造协同共生的智能出行生态。
(1)传统的汽车E/E架构精简化,形成面向3级及更高等级自动驾驶的高算力架构,具备高速车载以太、(跨)域集中化E/E、软件定义汽车、学习迭代等特性。
(2)以智能网联、自动驾驶、 机器学习、大数据、个性化需求融合,将会实现跨界融合。
(3)与智慧交通、智慧城市协同的智能驾驶服务及其所带来的高效的价值,更被消费者所认同。
(4)人车环境的融合感知,边云结合的智能计算、智能决策与智能控制的高度协同;智能汽车将成为一个持续创造价值的平台。
高速路上的自动驾驶技术即将实现,但在一般道路等很复杂的交通环境时的应用,依然存在不少课题需要解决,在技术开发方面还需要更多的时间。自动驾驶的实现任重而道远。
参考文献
[1] 郭喨,自动驾驶只欠“法律东风”.
[2] GBT 汽车驾驶自动化分级2020.3.
[3] 智能汽车趋势洞察及消费者调研报告.车云研究院2020.
猜你喜欢
中学生数理化·高二版(2022年4期)2022-05-09
扬子江(2019年3期)2019-05-24
检察风云(2017年17期)2017-09-08
中学数学杂志(初中版)(2017年4期)2017-08-28
中学科技(2015年11期)2015-11-25
小天使·四年级语数英综合(2011年4期)2011-06-30
故事家·风吟(2009年12期)2009-01-27
人民周刊(2009年12期)2009-01-25
