
基于多传感器融合的老人跌倒检测
2020-05-11 11:43欧国维蒙山
微型电脑应用 2020年1期
关键词:老人
欧国维 蒙山

摘 要: 老年人跌倒受伤的问题已经随着人口老龄化显得非常突出,目前主流的跌倒检测算法既不实用也不准确。为此提出一种新的基于加速度计、陀螺仪和磁力计的跌倒检测算法。把人的活动姿势分平躺姿态和非平躺姿态,并假设在跌倒后检测到躺卧姿势。检测算法分三步:四元数卡尔曼滤波,姿态识别,活动强度分析。通过安装在腰部的九轴传感器采集数据,通过四元数卡尔曼滤波器,使系统可以获得在地面坐标系统中人体姿态矢量。人体的姿态矢量包括欧拉角、四元数、加速度。欧拉角用于确定平躺姿态和非平躺姿态,四元数和加速度用来分析平躺时的活动强度。该算法具有计算量小、实时性好并且检测精度高、检测方便的特点。
关键词: 老人; 跌倒检测; 欧拉角; 卡尔曼滤波方程; 姿态检测; 活动强度
中图分类号: TP311 文献标志码: A
Fall Detecton for Elder People Based on Mult-sensor Fuson
OU Guowe, MENG Shan
(College of Electroncs and nformaton Engneerng, Shenzhen Unversty, Shenzhen 518052)
Abstract: Fall related njury s a central problem for the elder people. But prevalent methods are nether practcal nor useful n accuracy. Ths paper proposes a novel fall detecton algorthm usng accelerometers, gyroscopes and magnetometers. n our study, we dvde human actvtes nto two categores: lyng posture and no-lyng posture. We assume that a lyng posture s detected after falls. The proposed algorthm has three steps: quaternon Kalman flter, posture recognton, actvty ntensty analyss. The data are obtaned by usng nne-axal nertal measurement unt attached on the wast. Usng the quaternon Kalman fler, the system can obtan body's posture vectors measured n the frame of reference of the ground. The body's posture vectors nclude Euler angles, quaternon, acceleraton, etc. The Euler angles are used to determne the lyng posture or no-lyng posture. The quaternon and acceleraton are used to analyze actvty ntensty when lyng posture are detected. The proposed method features low computatonal cost and real-tme response. n addton, t has a nce accuracy and convenent n detect falls.
Key words: Elder; Fall detect; Euler angle; Posture recognton; Actvty ntensty
0 引言
世界衛生组织(WHO)2016年9月报道指出跌伤是世界各地意外或非故意伤害死亡的第二大原因。大约10%到15%的跌倒会导致老年人严重受伤,65岁以上老人当中超过33%的每年跌倒一次[1-2]。大多数老年人更愿意独自一人住在家里,他们可以接受新技术,前提是技术能够不影响他们的生活,且需要保证安全[3-4]。因此可靠的跌倒智能检测对于抢救老年人和避免更严重的后果是非常重要的[5-6]。
人体可穿戴装置包括加速度传感器和陀螺传感器[7],主要用于检测人体的运动,特别是跌倒。本文还对可穿戴式跌落探测器的位置优化进行了研究,由于加速度信号相似,且在不同跌落类型之间分布均匀,因此建议在腰部设置位置更有效[8-9]。此外,腰部附加探测器位于身体重心附近,除了手臂和腿的特征之外,提供了关于受试者的姿势和运动的可靠信息[10]。
一些跌倒检测算法假定跌倒事件具有大的加速度变化,并且使用单个三轴加速度计获得物体在三个方向上的加速度。这种方法是使用由跌倒事件数据集[11-12]确定的单个阈值来实现的。然而,只关注大的加速度可能导致从诸如快速坐下的类似跌倒活动中的许多假阳性检测。
本文提出了一种新的跌倒事件检测方法,将人体活动分为两个姿势:平躺姿态和非平躺姿态。我们假设平躺姿态是在跌倒后被检测到的,为了检测跌倒,我们的系统有三个步骤:四元数卡尔曼滤波,姿态识别和活动强度分析。九轴传感器(加速度计、陀螺仪、磁强计)基于可穿戴装置安装在人的腰部。跌落检测系统采用四元数卡尔曼滤波得到人体的四元数、欧拉角和加速度。如果检测到躺姿,我们可以利用加速度来分析活动强度,并确定老人是否跌倒。实验结果表明,该算法比其他算法具有更高的精度[12-13]。该算法计算量低。该方法也可以嵌入在可穿戴设备上。
2 问题提出
老年人的跌倒事件数据难以获取。跌倒事件研究通过在一个安全的控制环境中让年轻人模拟跌倒。日常生活活动(ADL)是由年轻人和老年人模拟的。
A. 数据获取
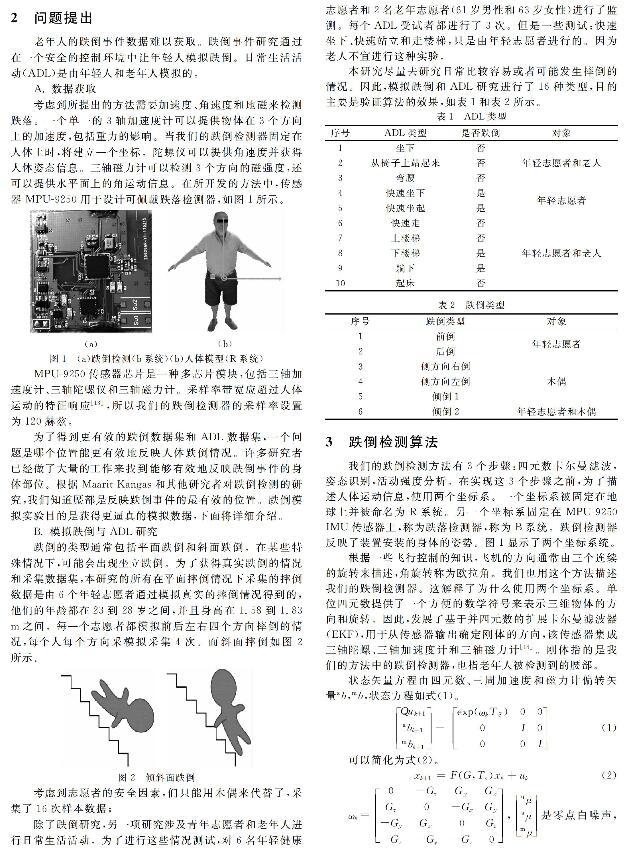
考虑到所提出的方法需要加速度、角速度和地磁来检测跌落。一个单一的3轴加速度计可以提供物体在3个方向上的加速度,包括重力的影响。当我们的跌倒检测器固定在人体上时,将建立一个坐标。陀螺仪可以提供角速度并获得人体姿态信息。三轴磁力计可以检测3个方向的磁强度,还可以提供水平面上的角运动信息。在所开发的方法中,传感器MPU-9250用于设计可佩戴跌落检测器,如图1所示。
MPU-9250传感器芯片是一种多芯片模块,包括三轴加速度计、三轴陀螺仪和三轴磁力计。采样率带宽应超过人体运动的特征响应[13],所以我们的跌倒检测器的采样率设置为120赫兹。
为了得到更有效的跌倒数据集和ADL数据集,一个问题是哪个位置能更有效地反映人体跌倒情况。许多研究者已经做了大量的工作来找到能够有效地反映跌倒事件的身体部位。根据Maart Kangas和其他研究者对跌倒检测的研究,我们知道腰部是反映跌倒事件的最有效的位置。跌倒模拟实验目的是获得更逼真的模拟数据,下面将详细介绍。
B. 模拟跌倒與ADL研究
跌倒的类型通常包括平面跌倒和斜面跌倒。在某些特殊情况下,可能会出现坐立跌倒。为了获得真实跌倒的情况和采集数据集,本研究的所有在平面摔倒情况下采集的摔倒数据是由6个年轻志愿者通过模拟真实的摔倒情况得到的,他们的年龄都在23到28岁之间,并且身高在1.58到1.83 m之间。每一个志愿者都模拟前后左右四个方向摔倒的情况,每个人每个方向采模拟采集4次。而斜面摔倒如图2所示。
考虑到志愿者的安全因素,们只能用木偶来代替了,采集了16次样本数据;
除了跌倒研究,另一项研究涉及青年志愿者和老年人进行日常生活活动。为了进行这些情况测试,对6名年轻健康志愿者和2名老年志愿者(61岁男性和63岁女性)进行了监测。每个ADL受试者都进行了3次。但是一些测试:快速坐下、快速站立和走楼梯,只是由年轻志愿者进行的。因为老人不宜进行这种实验。
本研究尽量去研究日常比较容易或者可能发生摔倒的情况。因此,模拟跌倒和ADL研究进行了16种类型,目的主要是验证算法的效果,如表1和表2所示。
3 跌倒检测算法
我们的跌倒检测方法有3个步骤:四元数卡尔曼滤波,姿态识别,活动强度分析。在实现这3个步骤之前,为了描述人体运动信息,使用两个坐标系。一个坐标系被固定在地球上并被命名为R系统。另一个坐标系固定在MPU-9250 MU传感器上,称为跌落检测器,称为B系统。跌倒检测器反映了装置安装的身体的姿势。图1显示了两个坐标系统。
根据一些飞行控制的知识,飞机的方向通常由三个连续的旋转来描述,角旋转称为欧拉角。我们也用这个方法描述我们的跌倒检测器。这解释了为什么使用两个坐标系。单位四元数提供了一个方便的数学符号来表示三维物体的方向和旋转。因此,发展了基于并四元数的扩展卡尔曼滤波器(EKF),用于从传感器输出确定刚体的方向,该传感器集成三轴陀螺、三轴加速度计和三轴磁力计[14]。刚体指的是我们的方法中的跌倒检测器,也指老年人被检测到的腰部。
状态矢量方程由四元数、三周加速度和磁力计偏转矢量ab,mb,状态方程如式(1)。Quk+1
abk+1
mbk+1=exp(ωkTS)00
00
00
(1) 可以简化为式(2)。xk+1=F(G,Ts)xk+uk
(2) ωk=0-GzGyGx
Gz0-GxGy
-GyGx0Gz
-Gx-Gy-Gz0,qμ
aμ
mμ是零点白噪声,G是xx,Ts是MU传感器的采样周期。传感器的零点漂移随着外界环境因素的变化,但卡尔曼滤波器在零点下工作效果较优,具有很强的适应性,即使零点噪声突破对实际影响不大。
测量模型如式(3)。
ak+1
mk+1=CbR(Quk+1)0
0CbR(Quk+1)Ak+1
Mk+1+abk+1
mbk+1+
avk+1
mkk+1
(3)
可以简化为式(4)。ZK+1=h(Xk+1)+vk+1
(4) CbR是R系统转换为b系统的一个方向矩阵。A和M是b系统的加速度和磁力计,加速度和磁力计的测量矢量是ak,mk,测量噪声是vk。
为了读者方便,EKF方程总结如式(5)~(9)。
计算先验估计状态:X-k+1=F(GK,Ts)Xk
(5) 计算先验误差协方差矩阵为式(6)。Pk+1=F(GK,Ts)PkF(Gk,Ts)T+Qk
(6) 过程协方差矩阵:
Qk=Quk00
0Tsδk0
00Tsδk, Quk=q3k-q2kq1k
q2kq3k-q0k
-q1kq3kq3k
-q0k-q1kq2k
计算卡尔曼增益为式(7)。Kk+1=PK+1FTk+1(FkPk+1FTk+Rk+1),Rk+1=[δ2a0
0δ2a]
(7) Fk+1是雅可比矩阵。
计算后验状态估计为式(8)。Xk+1=X-k+1+Kk+1[Zk+1-h(X-k+1)]
(8) 计算后验误差协方差矩阵为式(9)。Pk+1=P-k+1(1-Kk+1Fk+1)
(9) 基于以上分析,首先对从传感器MPU-9250芯片读出的MU数据进行四元数卡尔曼滤波处理。如果在一个第二区间内的欧拉角的所有值落入算法1的步骤4中指定的区域。则检测到平躺的姿势,否则,检测到平躺姿势。如果探测器检测到人体姿势是平躺姿势。该检测器将检查姿势的变化。为了区分姿态变化是否是故意的,应用了前4秒沿重力方向的加速度数据。如果在前4秒内的加速度数据的值满足算法1的步骤10中指定的条件。将检测到跌倒事件。整个过程如算法1所示。
下面是关于该过程的详细解释:
1) 平躺和非平躺姿态:在本文中,我们可以使用欧拉角来反映躯干姿势。通过多次跌倒实验,我们找到了最合理的平躺姿态。最合理的方法是主干与垂直方向的夹角是否在一秒钟内总是大于40°。为了简单起见,我们只考虑绝对螺距或偏航角。如果俯仰角或偏航角度小于40°,则会检测到平躺姿态。
2) 活动强度:当人体有向下的动作时,垂直方向加速度值将小于重力,并且当物体接触地面时存在速度减速。如果检测到平躺,垂直方向的加速度越大,身体对地面的冲击力就越大。实验结果表明,它是检测很可能落在最小垂直加速度小于0.4g和最大垂直加速度大于2.6g。我們能从四元数和基础系统得到沿重力方向的加速度,这个加速度是基于b系统的,值Ac为式(10)。
算法1: 三步跌倒检测过程
1. A={ax,ay,az},M={mx,my,mz},G={gx,gy,gz},ntervalNum=0
%第一步四元卡尔曼滤波,欧拉角={yaw.ptch,rol}
2.Qu=quaternon_Kalman_flter(Acc,Mg,Gyro)
%四元数转换为欧拉角
3.Ω=transform(Qu)
%第二步是姿态识别,如果所有的偏航和俯仰值
1秒钟内小于45°,平躺状态就被探测到。
4.f |yaw|>40° ∪ |ptch|>40° then
5. ntervalNum =ntervalNum + 1
6.else
7. ntervalNum =0
8.endf
9.f ntervalNum >120 then
%第三步是活动强度分析
f Avmn<0.4g and Avmax>2.6g
即探测到跌倒
10.f Avmn<0.4g∩Avmax>2.6g
11.Then return YES
12.else
13. rerutn NO
Ac=2ax(q1q2-q0q2)+2ay(q0q1-q2q3)+a2(q20-q21-q22+q23)+ab|z
(10)
另一种跌倒检测算法仅使用阈值法。通过获取3个信号的平方和,得到腰部3轴加速度计的合成信号。算法2如下所示。
算法2:阈值方法
1. Acc={ax,ay,az}
2. Av=a2x+a2y+a2z
3. f Avmn<0.4g∩Avmn>3g then
4. return YES
5. else
6. return NO
4 实验测试
如图3和图4所示。
腰部的垂直加速度和腰部姿势有不同的特征。跌倒事件和类似事件有加速度的剧烈变化。垂直加速度的最大值和四秒钟内垂直加速度的最小值是描述和测量人类活动强度的重要参数。在本节中,我们通过姿势识别来评估我们的方法的准确性。
A. 姿态识别
不同的ADL类型有不同的身体姿态,图3显示了16种人体姿势。平面下降、倾斜下降2和躺床的欧拉角有明显的变化。身体直立的运动,像走路或坐着,没有欧拉角的巨大变化。我们把所有类型的跌倒和ADL的数据进行统计,如表3和表4所示。
表格显示最大值在大多数ADL类型中,绝对欧拉角(ptch和yaw)小于35°,在平降时绝对偏航或俯仰的最大值大于45°。因此,用于识别人体姿势的阈值设置为40°。当在1s内所有的ptch和yaw角都大于40°,此时认为检测到躺卧状态。由于一些运动也满足算法1步骤4所规定的区域,因此使用1秒的时间来减少噪声干扰的影响。
B. 模拟跌倒研究
Bourke和其他研究人员[12-15]使用算法2来区分跌倒和ADL,他们假设跌落发生在大加速度下。然而,快速坐下等也具有大的垂直加速度。我们的方法增加了姿势识别,虽然有些摔倒加速度较大,但它们仍然不是平躺姿态,如快速坐下和走下楼梯。我们的算法的第一步可以过滤掉一些类似跌倒的情况,这就是为什么我们的方法比其他方法好的原因。
C. 斜面跌倒
我们已经讨论了在楼梯上跌落下来的两种形式,如图2所示。第一种情况具有大的垂直加速度和姿势变化,如图3(a)和图4(a)所示。现有的一些跌倒检测系统[13]使用主干倾斜变化来检跌倒,而另一些[11-12]使用大的加速度变化来检测跌倒。他们的方法和我们的方法都很好。但在图2(b)所示的第二种情况下,垂直加速度的变化很小。由于楼梯陡峭,人体在跌倒后迅速接触楼梯,人体姿势的变化并不比图4(a)所示的其他跌倒特别明显。从我们的实验中看出,最小的顶部峰值和最小值分别为2.2 g和0.5 g,很难用加速度或倾角变化来检测跌倒。但是我们的方法比其他算法更好。
D. 计算复杂度
Kalman滤波器具有良好的实时性。其在处理高斯模型的系统上效果颇佳;随着计算机技术的发展,卡尔曼滤波是线性系统的最小方差估值器。作为一个线性优化的模型,相对其他非线性的例如联合滤波器等计算复杂度很低,通过实际验证在32位微控制器中也能很好地工作。
如图5所示。
5 结果
根据图5(a)所示的实验数据的分析结果,所提出的跌倒检测算法除了类似跌倒情况(快速坐下、快速站起来、快速起床),在从日常生活活动中检测跌倒事件的准确度与其他方法是相同的。但我们的方法在检测类似跌倒活动和斜面跌倒方面有较好的性能。通过我们的算法(算法1)与其他研究者[13]的算法比较,本文提出的检测器能够快速区分从扶手椅上坐下来和从扶手椅上站起来这种类似跌倒的情况。这就是为什么我们的算法去进行姿态判别的重要性。即使所提出的方法在卧倒和斜倒两种情况下有一些错误检测,但其效果也优于如图5所示的阈值方法(算法2)。
6 总结
本文采用九轴MU传感器对日常生活活动中的跌倒进行检测。所提出的方法有三个步骤。第一步是通过四元数卡尔曼滤波器得到姿态矢量。第二步是检测卧姿。第三步是检测活动强度。该方法将人的姿势分为平躺和非平躺两种类型。该系统可以通过四元数卡尔曼滤波得到人体的姿态矢量。姿态矢量包括欧拉角、四元數、加速度。欧拉角用于确定姿势类型。四元数和加速度用于分析平躺姿势时的活动强度。该算法具有实时性强的特点。结果表明,我们的方法可以减少误报。然而本方法在卧床和斜面摔倒2方面也存在一些问题,主要是因为采用木偶等做数据采集实验和真实情况还是有差异,现实中也无法通过实际老人去做跌倒实验,今后会探索更接近老人跌倒的实验方法。
参考文献
[1] N Noury. A smart sensor for the remote follow up of actvty and fall detecton of the elderly[C]// 2nd Annual nternatonal EEE-EMBS Specal Topc Conference on Mcrotechnologes n Medcne and Bology.Proceedngs. Madson, W, 2002 :314-317.
[2] Suhua Luo, Qngmao Hu. A dynamc moton pattern analyss approach to fall detecton[C]// EEE nternatonal Workshop on Bomedcal Crcuts and Systems, 2004 :1-5-8a.
[3] S J Brownsell, D A Bradley, R Bragg, et al. Docommunty alarm users want telecare?[J]. Journal of Telemedcne and Telecare, 2000,6(4) :199-204.
[4] Brownsell Smon, S Mark Hawley. Automatc fall detectors and the fear of fallng[J]. Journal of Telemedcne and Telecare, 2004,10(5) : 262-266.
[5] J Y Hwang, J M Kang, Y W Jang, et al. Development of novel algorthm and real-tme montorng ambulatory system usng Bluetooth module for fall detecton n the elderly[C]// The 26th Annual nternatonal Conference of the EEE Engneerng n Medcne and Bology Socety, San Francsco, CA, 2004 : 2204-2207.
[6] B Schlkopf, J C Platt, J Shawe-Taylor, et al. Estmatng the Support of a Hgh-Dmensonal Dstrbuton[J]. Neural Computaton, 2001,13(7) : 1443-1471.
[7] Lexell Jan. Ageng and human muscle: observatons from Sweden[J]. Canadan Journal of Appled Physology, 1993, 18(1) :2-18.
[8] K Doughty, R Lews, A Mcntosh. The desgn of a practcal and relablefall detector for communty and nsttutonal telecare[J]. Journal of Telemedcne and Telecare, 2000,6(1) :150-154.
[9] Maart Kangas, Antt Konttla, Per Lndgren,et al. Comparson of low-complexty fall detecton algorthms for body attached accelerometers[J]. Gat & Posture, 2008, 28(2) : 285-291.
[10] M J Mathe, A C F Coster, N H Lovell, et al. Accelerometry: Provdng an ntegrated practcal method for long-term ambulatory montorng of human movement[J]. Physol. Meas., 2004, 25(2):.
[11] M Kangas, A Konttla, Wnblad, et al. Determnaton of smple thresholds for accelerometry-based parameters for fall detecton[C]// 2007 29th Annual nternatonal Conference of the EEE Engneerng n Medcne and Bology Socety, Lyon, 2007: 1367-1370.
[12] A K Bourke, J V OBren, G M Lyons. Evaluaton of threshold-based tr-axal accelerometer fall detecton algorthm[J]. Gat & Posture, 2007, 26(2): 194-199.
[13] Q L, J A Stankovc, M A Hanson, et al. Accurate, Fast Fall Detecton Usng Gyroscopes and Accelerometer-Derved Posture nformaton[C]// 2009 Sxth nternatonal Workshop on Wearable and mplantable Body Sensor Networks, Berkeley, CA, 2009: 138-143.
[14] A M Sabatn. Quaternon-based extended Kalman flter for determnng orentaton by nertal and magnetc sensng[J]. EEE Transactons on Bomedcal Engneerng,2006, 53(7): 1346-1356.
[15] J Chen, K Kwong, D Chang, et al. Wearable Sensors or Relable Fall Detecton[C]// 2005 EEE Engneerng n Medcne and Bology 27th Annual Conference, Shangha, 2005:3551-3554.
(收稿日期: 2018.11.05)Mcrocomputer Applcatons Vol.36,No.1,2020技術交流微型电脑应用2020年第36卷第1期Mcrocomputer Applcatons Vol.36,No.1,2020技术交流微型电脑应用2020年第36卷第1期
作者简介:欧国维(2001-),男,通信作者。研究领域:机器人与智能系统。
蒙山(1973-),男,博士,副教授。研究领域:机器人智能信息处理、嵌入式实时信号采集与处理。文章编号:1007-757X(2019)12-0149-05
猜你喜欢
采写编(2017年2期)2017-06-29
学理论·下(2017年5期)2017-06-03
大观(2017年3期)2017-05-16
教育教学论坛(2017年18期)2017-05-16
安徽商贸职业技术学院学报·社会科学版(2017年1期)2017-05-08
医学信息(2016年37期)2017-03-20
文学港(2016年12期)2017-01-06
武术研究(2016年11期)2016-12-16
南风窗(2016年22期)2016-11-02
商(2016年21期)2016-07-06
