码头多功能作业车液压系统设计
2020-05-13 13:02余世林
黑龙江交通科技 2020年3期
余世林
(陆军军事交通学院镇江校区,江苏 镇江 212003)
0 引 言
港口码头作为物资水陆转运的重要基地,其状况保持好坏直接影响到货物流动效率。码头多功能作业车是针对港口码头轻度破损情况下的特点和实际需求,研制的集高低空作业、夜间照明、码头及码头设施的维护抢修等功能于一体的码头维修装备。
在港口码头遭受损伤情况下,高低空设施和电路的损坏对码头正常运行影响尤为重大,在码头快速抢修环节中,高低空作业和用电作业对抢修起到关键作用。码头多功能作业车的高低空作业装置的控制和用电设备的电力来源由车辆的液压系统所控制驱动,码头多功能作业车液压系统液压系统作为该车的动力源,其设计质量直接影响到该车效能的发挥,是该车研制成功的关键所在。
1 码头多功能作业车液压系统原理设计
1.1 码头多功能作业车工作流程
码头多功能作业车液压系统主要驱动支腿机构的展开与撤收、高低空作业装置的展开与撤收以及取力发电设备的工作(见图1)。

图1 码头多功能作业车展开作业示意图
(1)支腿机构展开的工作流程
支腿机构主要由固定支腿、活动支腿、水平油缸、垂直油缸和支脚板组成,其通过液压泵泵取液压油经支腿控制阀驱动支腿水平油缸展开或收回活动支腿,驱动垂直油缸举升或下降整个修理车。
(2)高低空作业装置的工作流程
高低空作业装置主要由转台、回转机构、主臂、折臂总成、工作斗、调平机构、电液系统等组成。
工作时,液压马达驱动回转机构带动高低空作业装置相对副车架回转;驱动主臂油缸带动主臂做变幅运动;驱动折臂油缸实现折臂的变幅运动。
(3)自取力发电装置的工作流程
在需要使用用电设备时,发动机动力经取力器、液压泵传至液压马达,由马达带动发电机发电,经由配电厢发配电。
1.2 液压系统原理设计
(1)系统组成
该车液压系统(如图2)主要由液压泵、液压马达、支腿操纵阀、主比例阀、调平比例阀、分流阀、溢流阀、平衡阀、双向液压锁、手摇泵、回转复合缓冲阀、应急动力单元、液压油箱、中心回转接头、过滤器等液压元件及管路附件等组成。其中平衡阀、双向液压锁、应急泵等安全装置,可以防止油路过载和避免因软管破裂而引起意外事故。

1-回转平衡阀;2-平衡阀;3-折臂平衡阀;4-主阀;5-压力表开关;6-调平平衡阀;7-调平工作阀块;8-液压锁;9-多路换向阀;10-压力表;11-高压过滤器;12-发电马达;13-油源阀块;14-应急动力单元;15-齿轮泵图2 液压系统原理图
(2)取力装置设计
液压系统以汽车发动机为动力,通过取力器取力至液压泵,在液压系统中装有电磁阀,当取力发电时,液压动力传至液压马达带动发电机发电,然后经由配电箱发配电,为维修机工具提供动力。当高低空作业装置工作时,液压油一路经调平平衡阀到达工作斗调平油缸,实现工作斗调平;另一路经双向阀分别作用于支腿机构和臂架机构,以实现前支腿的伸缩、顶升和后支腿的摆动、顶升,吊臂变幅、回转,折臂展开以及工作斗调平。液压系统还设有备用动力单元,可以调节工作斗、臂架机构和支腿机构,以备双联泵失效时使用。
(3)支腿部分液压系统原理设计
支腿展收采用开式液压系统,支腿部分油路采用纯机械操纵型。支腿油缸上装有双向液压锁,可将活塞杆锁定在任意位置上,以防止高低空作业装置在长时间作业时,支腿自行回缩。并可避免因油路中软管发生意外破裂,致使支腿失压而造成翻车事故。同时也可防止整车在行驶或停放时支腿自行外伸或跌落。支腿的操纵由下装操纵阀完成,操纵阀旁设有水平仪,用以调整整车水平。从而保证系统性能稳定可靠。
(4)高低空作业装置液压系统原理设计
高低空作业装置由液压系统驱动,通过电气系统控制,采用电液比例阀操纵,具有操作轻便灵活、无级变速、微动性能好、自动化程度高等优点。作业时由液压回转机构、变幅油缸、折臂油缸、调平控制、工作台控制六动作的联合运作来达到工作台任意位置的定位。回转机构由液压系统驱动,为避免回转摆动,在液压马达中安装回转缓冲阀,回转平稳可靠。工作斗调平机构主要由调平角度传感器、电液伺服机构、折臂油缸等组成,调平角度传感器通过电液伺服机构操纵折臂油缸自动完成调平,工作平稳,噪声小,操作方便。
2 液压系统计算
2.1 取力计算校核
取力发电装置安装于底盘下(如图3所示),以汽车发动机(ISBE185 30)为动力,通过取力器(型号为4205NG-010)取力至双联泵(CBG2050/1010)。在液压系统中装有电磁阀,当取力发电时,液压动力传至液压马达(XM-40),带动发电机(E031)发电;当高低空作业装置工作时,液压油一路经调平平衡阀到达工作斗调平油缸,实现工作斗调平;另一路经双向阀分别作用于支腿机构和臂架机构,以实现前支腿的伸缩、顶升和后支腿的摆动、顶升,吊臂变幅、回转,折臂展开以及工作斗调平。
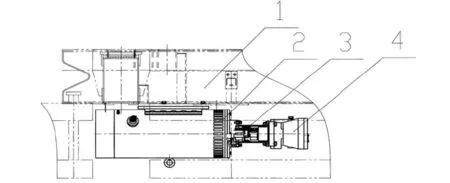
1-副车架;2-发电机;3-联轴器;4-液压马达图3 取力发电装置结构图
(1)发电取力计算校核
①发电机驱动扭矩
发电机额定转速1 500 r/min,输出功率14 KW,功率因素1.0,发电马达排量40 mL/r,马达机械效率0.9。
发电机驱动扭矩Md=9 549P/n=89 Nm
双联泵供发电机发电时油泵总排量50 ml/r,考虑损耗(总效率取0.75),油泵能提供至发电马达的扭矩为
②取力器输出扭矩
油泵总排量50 ml/r,液压系统压力21 MPa,油泵机械效率0.9,取力器允许扭矩350 Nm。
因此,取力发电装置设计满足使用要求。
(2)高低空作业取力计算校核
高低空作业装置系统工作压力为20 MPa,支腿控制系统工作压力为18 MPa,发电系统工作压力为14 MPa。选用的CBGj2050/1010双联齿轮泵额定压力为20 MPa,公称排量为50/10 ml/r,发动机工作转速800 r/min,容积效率>92%,总效率>83%,其中CBGj2050供高低空作业系统,CBGj1010供工作斗调平系统。当发动机用于发电时,额定转速2 500 r/min。
①系统流量计算
ISBE185 30发动机怠速为800 r/min,额定转速为2 500 r/min,取力器减速比为1.716。
则CBGj2050流量L怠=50×800×0.83/1.716/1 000=19.35 L/min
L额=50×2 500×0.83/1.716/1 000=60.46 L/min
则CBGj1010流量L怠=10×800×0.83/1.716/1 000=3.87 L/min
L额=10×2 500×0.83/1.716/1 000=12.09 L/min
②发电机工作状态计算
E031发电机额定转速为1 500 r/min,输出功率14 KW,功率因素1.0。额定扭矩M=14×9 549/1 500=89.124 Nm,对应的XM-F40L发电马达压力P=M×10×0.91/1.59/40=12.75 MPa,考虑管路损失,取发电系统压力为14 MPa。
③各油泵额定功率计算
调平系统压力为18 MPa,P调平=L×P/60/0.83=1.4 KW
高低空作业装置压力为20 MPa,P高低空=L×P/60/0.83=7.77 KW
为保证高低空作业的安全性,维持发电机转速的稳定性,在配电箱上安装发电控制开关。当控制开关闭合时,底盘发动机油门的电磁气阀动作,调整发动机转速至2 500 r/min,油泵配油块的电磁阀动作,发电马达的油路接通,开始发电。在正常发电状态下,高低空作业装置不工作。当需要高低空作业时,可断开发电控制开关,发动机转速自动调整至怠速状态800 r/min,高低空作业装置及自动调平机构可以正常工作,发电机不工作。
2.2 执行元件分析计算
要保证码头多功能作业车工作安全可靠,工作斗的升降速度和回转机构的回转速度必须控制在规定范围内。根据GB/T9465-2008的要求,工作平台的起升、下降速度应不大于0.4 m/s,回转机构的作业车最大回转速度不大于2 r/min。表1给出了各执行元件的供油量和结构尺寸,并校核计算最大运行速度。
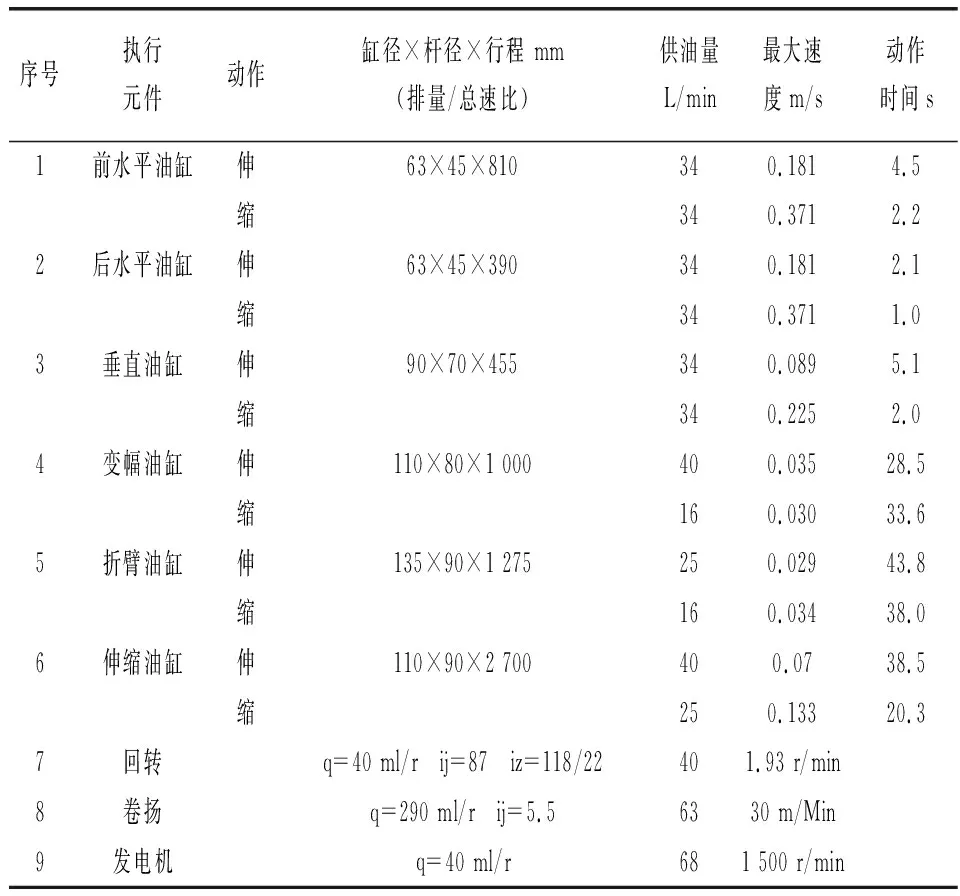
表1 各执行元件的速度分析
3 结 论
本文根据码头设施设备损伤维修的实际需求,设计了一种适合码头多功能作车车作业的液压系统,该系统具有以下特点。
(1)采用双联泵设计汽车发动机取力发电系统,能够很好的适应码头多功能作业车高低空作业和用电作业的需要。
(2)液压系统设计有备用动力单元,以备双联泵失效时使用,保证了高低空作业的安全性。
(3)高低空作业装置采用电液比例阀操纵,操作便灵活、微动性能好;回转机构在液压马达中安装回转缓冲阀,平稳可靠;工作斗调平机构通过电液伺服机构操纵折臂油缸自动完成调平,工作平稳,噪声小。
经过港口码头3年的应用表明,系统的设计选型科学合理,保证了装备的使用安全可靠,快速方便。
猜你喜欢
现代制造技术与装备(2022年1期)2022-02-21
煤气与热力(2021年6期)2021-07-28
军民两用技术与产品(2021年10期)2021-03-16
作文周刊·小学三年级版(2020年24期)2020-07-17
中国科技纵横(2020年5期)2020-06-29
北京航空航天大学学报(2017年9期)2017-12-18
棋艺(2016年4期)2016-09-20
南方文学(2016年3期)2016-06-12
兵器知识(2016年2期)2016-01-29
汽车科技(2014年3期)2014-08-02