升降横移立体车库升降电机仿真分析
2020-05-14 08:24龚文祥肖志权
机电工程技术 2020年3期
龚文祥,肖志权
(武汉纺织大学机械设计及自动化学院,武汉 430027)
0 引言
随着中国经济的持续高速发展,汽车保有量快速增长带来城市停车位的供需矛盾不断凸显,根据公安部交管局最新数据显示[1],截至2019年6月全国机动车保有量达3.4亿辆,其中汽车2.5亿辆。国家发改委公布数据显示,目前我国大城市小汽车与停车位的平均比例约为1∶0.8,中小城市约为1∶0.5,与发达国家1∶1.3的比例相比,全国停车位缺口超过5 000万个。在当今各大城市普遍停车难的大背景下,相较于传统地面停车场,机械式立体车库因节约土地、停车效率成倍提高及智能化等诸多优势而成为解决这一困难的有效手段。
目前,我国的机械式停车设备包括升降横移类、简易升降类、垂直升降类、巷道堆垛类、平面移动类、垂直循环类、水平循环类、多层循环类和汽车专用升降机等9大类[2]。已建和在建的机械式立体停车库中,以升降横移类立体车库为最多,尤其是近年来已经建设并在用的机械式立体停车库中,升降横移类立体车库(简称升降横移车库)占据超过60%以上的大多数。
升降横移类立体车库的二层及以上车位,需要用本车位配置的升降电机加传动系统来提升或降下载车台,实现存取车所需要的提升和降下动作。通常,载车台的提升和降下到位后,由到位检测装置(一般是行程开关)检测,并将载车台的到位信号发给车库的控制系统的PLC,由PLC控制电气系统,使升降电机断电停止运行。
由于升降横移车库二层及以上车位的载车台在下降和下降到位(落地)的过程中,电机的工作状态经历从有载到空载的变化,空载运行的瞬间即下降到位。本文设想通过检测三相电路中升降电机的线电流的变化,来检测载车台的降下到位,替代通常采用的行程开关。为此,本文将通过对升降电机的上升和下降的过程进行计算机仿真分析及实验,为上述替代方案提供设计依据。
1 升降横移类立体车库
升降横移类立体车库主要包括升降和横移载车装置,系统由框架、载车台、动力和传动系统、控制系统、安全防护系统等部分组成。以某3层3列升降横移车库为例,如图1所示[3],升降横移类立体车库每个车位均有载车台,通过使载车台升、降、横移运动到达地面一层,其中,一层载车台只做平移,顶层载车台只做升降,中间层载车台既可平移又可升降,下层载车台为上层载车台移出空位,实现存取车。为保证运行安全,升降机构和横移机构之间应有关联措施,当升降机构/横移机构未到正确位置时,横移机构/升降机构不能移动[4]。
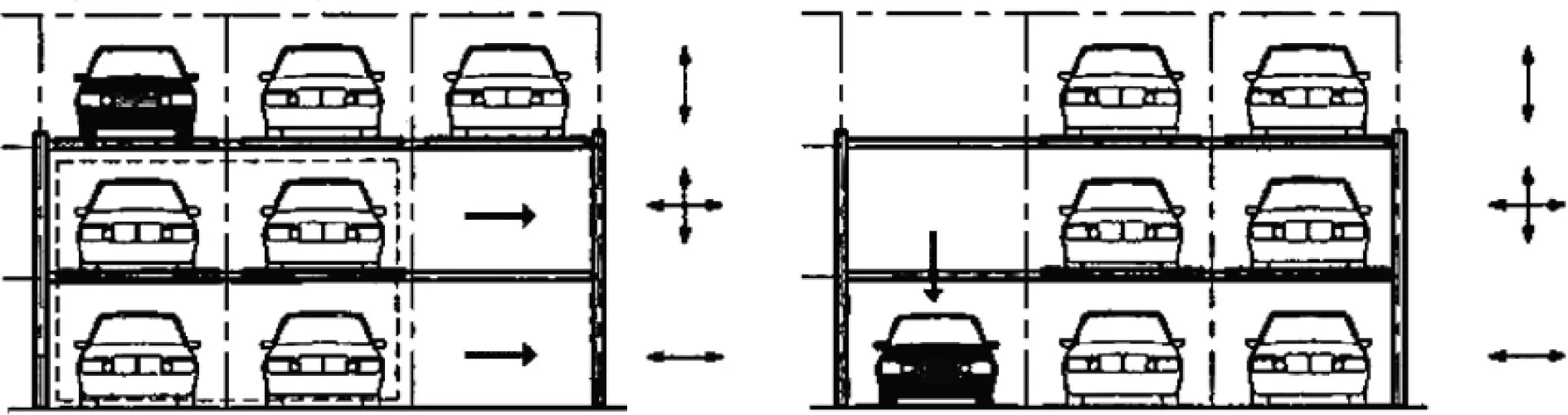
图1 三层三列升降横移类立体车库设备示意图
2 升降横移立体车库升降电机及其电气控制
2.1 升降电机的选型
通常,升降横移车库二层及以上的升降载车台自重约500 kg(含提升链条),最大载车重量为2 000 kg,升降速度v≥4 m/min,升降电机采用立体停车专用的三相异步减速电机,通过链条传动方式带动载车台上升和下降。通过核算,某升降横移车库二层至四层载车台的提升电机选择某品牌型号为MLPK402206003专用减速电机,额定功率为2.2 kW,减速比为60,电机的标称额定电流为5.9 A,输出转速为23 r/min,输出扭矩为80.6 kg·m。
2.2 升降电机工作的负载特性
(1)提升阶段
图2所示为重物上升阶段,T1为电动机转矩,T2为负载转矩,v为电动机速度。重物提升时电动机旋转方向为n的正方向,启动时,电动机拖重物上升,T1与n方向一致。要能提升重物,T1>T2,即动态转矩Td=T1-T2和加速度a=d n/d t为正,系统加速运行。直到电机加速到匀速状态,转子转速低于定子转速,方向相同,转差率提供电磁转矩,此时T1=T2;电机产生的转矩等于负载转矩,系统恒速运转,即系统处于稳态。

图2 重物上升示意图

图3 重物下降示意图
(2)下降阶段
图3所示为重物下降,n为逆时针方向,重物速度方向向下,T1、T12转矩方向与提升阶段相同。电机下降过程为一个回馈制动过程,当电动机一启动时,转速就会增加,甚至超过同步转速,而回馈制动就是为了防止转速无限制上升造成事故,同时电机处于发电状态,反馈给电网。电动机定子和转子转速方向一致,此时由于重物作用在轴上,磁场切割转子导条的方向和电动机状态相反,电磁转矩方向与转子转向相反,为制动性质,通过电磁感应作用由电机输出电功率,电机发电产生制动力矩与负载重力平衡,匀速下落。
2.3 升降电机的电气控制
图4所示为升降横移电机的电气控制电路图,根据升降横移类立体车库的工作原理,任何一个时刻,车库至多只有一个车位的升降电机在工作,即只允许一台升降电机在运行,不允许两台或以上的升降电机同时工作,而为了提升存取车的效率,允许同一时间内多台横移电机同时运行。
3 基于MATLAB/Simulink的升降电机仿真分析
3.1 三相异步电机的理论分析
三相异步电机的动态数学模型是建立在矢量变换控制的基本思路基础之上的,而矢量变换控制的基本思想是通过数学上的坐标变换。其实质是通过数学变换把三相交流电动机的定子电流分解为两个分量,一个分量为用以产生旋转磁动势的利励磁分量id;另一个分量为用以产生电磁转矩的转矩分量iq。
电流从三相坐标系变换到两相坐标系的变换矩阵[5]:

两相交流电iα、iβ和两个直流电id、iq之间存在如下关系

式中:iα、iβ分别为α、β轴电流;iA、iB、iC分别为A、B、C轴电流。
三相异步电机电流有效值计算方法[6]:

式中:I为电流有效值;ia、ib分别为a、b相电流。
以上用矩阵方程表示的异步电机的数学模型,将电机模型表示成状态方程的形式;契合实际所需电流参数,介于电流有效值计算,为实验及仿真奠定基础。
3.2 升降电机的提升与下降工况的仿真
本文升降电机提升(载车台)和下降(载车台)的仿真模型基于Matlab/Simulink提供的异步电动机模块Asynchronous Machine[7],并结合了车库所用减速电机以及机械传动系统的简化仿真模型。电动机仿真所需要的部分参数难以直接获得,本文根据选用电机的样本参数、该型电机空载和满载运行的试验数据及文献[8]等进行试算、调整和标定。
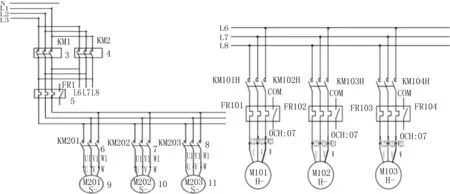
图4 升降横移电机电气控制方式示意图
3.2.1 升降电机提升工况的仿真
(1)模拟升降电机提升仿真模型
图5所示为模拟升降电机提升工况,同时电机正常启动,电机初始有500 kg的负载;模型中的力矩转换模块,将立体车库车重量折算为升降电机的输出轴转矩。

图5 升降电机提升和下降仿真模型
(2)参数设置
电压220 V,A、B、C三相电源初始相角分别为0°、120°、-120°,频率为50 Hz。电机采用鼠笼式电机,星行接法;异步电机基本参数:额定功率PN=2 200 W,额定电压UN=380 V,额定频率fN=50 Hz,额定转速nN=1 420 r/min;定子电阻Rs=0.534Ω,定子电感Ls=0.002 H;转子参数电阻Rr=0.65Ω,转子电感Lr=0.002 H,定子与转子之间的互感Lm=0.325 H,电机转动惯量J=0.089 kg·m2,磁极对数np=2,不计转子的扭转弹性转矩和阻转矩。仿真算法为ode23t,最大步长0.000 1 s。
(3)仿真结果分析
图6所示为电机转速,图7所示为定子电流。升降电机刚启动时,电流较大,随着电机转速的增加,转差率的减小,电机转矩逐渐平衡。当电机带负载运行时,转速低于空载转速,定子旋转磁场与转子的相对速度增加,转子感应电动势增加,转子电流产生的电磁转矩和负载转矩平衡。3.2.2升降电机下降工况的仿真

图6 上升时电机转速

图7 上升时电机定子电流

图8 下降时电机转速

图9 下降时电机定子电流
(1)模拟升降电机下降仿真模型
电机下降过程为回馈制动过程,任意调换三相电源的任意两相,电机反转。为了模拟载车板下降至落地的过程,增加一个阶跃开关,仿真设当t=1 s时(实际上载车台平稳下降约25 s后落地),电机上的负载力从500 kg变为0。
(2)仿真模型参数设置
参数设置同上升电机仿真模型。
(3)仿真结果分析
图8所示为电机转速图,方向与上升过程相反。图9所示为电机0~2 s定子电流变化图,当t=1 s时,作用于电机转轴上的负载变为0,即载车台下到位落地,此时电机的定子电流突然变小。如图10所示,可见电机定子电流从原来稳定的约3.69 A突变为3.3 A,历时约0.06 s。如表1所示,测试并记录出不同负载情况下定子电流值,定子电流随着负载的增加会变大,表明载车台在不同载重的情况下,电机从下降到下到位落地过程中,电机定子电流会以大于3.69 A突降至空载电流3.3 A。

图10 t=1 s时定子电流局部图

表1 下降阶段升降电机的定子电流与负载的关系
4 结束语
本文基于Matlab/Simulink中建立了升降电机的仿真模型,并进行了升降电机提升和下降及下到位落地过程的仿真分析;下降和下到位落地仿真结果表明:车库升降电机在空载车台和有车下降至下到位落地过程中,电机线电流由3.6 A及以上突降到空载电流约3.3 A,因此,检测升降电机下到位需用的电流感应开关的穿心电流开关量设定值可以设置为3.3 A。
猜你喜欢
汽车实用技术(2022年6期)2022-04-02
今日自动化(2021年6期)2021-09-03
中国特种设备安全(2019年4期)2019-05-20
机电产品开发与创新(2018年6期)2018-12-13
发明与创新·中学生(2018年10期)2018-10-15
装备制造技术(2018年6期)2018-08-04
家庭百事通·健康一点通(2017年9期)2017-09-22
电子制作(2017年2期)2017-05-17
创新作文(1-2年级)(2017年1期)2017-04-19
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27