
基于TLE的低轨巨星座控制研究
2020-05-18 07:37沈红新
力学与实践 2020年2期
孙 俞 沈红新
(中国西安卫星测控中心, 宇航动力学国家重点实验室, 西安710043)
近年来低轨星座发展迅速,很多公司提出了巨星座建设计划[1]。新一代铱星星座由66颗工作星和9 颗备份星组成,全部由SpaceX 公司的猎鹰9 号运载火箭发射[2]。2017 年至2019年,猎鹰9号火箭通过8 次发射,将75 颗铱星送入太空,其中第6 次发射5 颗卫星,其余各次每次发射10颗卫星,目前新一代铱星已经完成组网。铱星星座共有6 个轨道面,每个轨道面均匀部署11 颗卫星,相邻两星之间的理论相位差为32.727◦,轨道高度约为774.63 km(地球半径6378.14 km),倾角约为86.39◦,卫星质量约为860 kg。一网计划建设一个由648 颗卫星组成的星座,其中48 颗为备份星[3]。一网星座轨道面个数为12,预计每个轨道面均匀部署49 颗卫星,相邻两星之间的理论相位差为7.347◦,轨道高度约为1200 km,倾角约为87.90◦,卫星质量约为147.5 kg。SpaceX 公司计划建设星链巨星座,预计2025 年左右建成由12 000 颗卫星组成的星座,后期可拓展至42 000 颗卫星[4]。早期12 000 颗卫星中,约1600 颗部署在高度550 km、倾角53◦的轨道上,约2800颗部署在高度1150 km 的轨道上,约7500 颗部署在高度340 km的轨道上。星链第0批卫星共有60颗,其中少数卫星未能部署在工作轨道面,相邻两星之间的理论相位差为6◦,高度约为550 km,倾角约为53◦,卫星质量约为227 kg。亚马逊公司计划建设“柯伊伯”星座,该星座由3236 颗卫星组成,其中784颗部署在590 km 高度轨道,1296 颗部署在610 km高度轨道,1156颗部署在630 km 高度轨道[5]。表1给出了各星座的基本信息[1-6],需要说明的是,由于数据来源多处,而且运营商发布的信息经常在变动,所以表中信息只是作为参考。与中地球轨道(medium Earth oribit, MEO)星座相比,低轨星座中卫星运行周期较短,不同卫星间100 m 平半长轴差一天引起的相位漂移,低轨道卫星(low Earth orbit,LEO)约为0.1◦,MEO 约为0.003 61◦。由于巨星座卫星数量较多,考虑星间安全等因素,其构型保持精度更高,维持控制更为复杂。

表1 部分巨星座建设计划
传统轨道计算方法存在10 m 左右的瞬平转换误差,对于组网运行的卫星,需要对星座的构型进行维持,维持控制半长轴改变量一般较小,所以难以精确计算不同卫星之间的平半长轴差。通过不同卫星相位差的变化规律,反演其平半长轴差,可以看出平半长轴控制频率和控制精度。根据这种思路,本文利用公开获取的TLE轨道根数,重点分析了铱星、一网和星链第0批卫星的轨道维持控制方案。
1 分析方法
本文使用的两行轨道根数(two-line element,TLE)从space-track 网站下载,外推模型为STK/SGP4,平根模型为STK/Kozai-Izsak[7],输出为日期真赤道坐标系(true of date)结果。通过对比我国部分低轨卫星精密轨道和其对应TLE轨道根数,可知TLE轨道根数的位置误差在1 km 左右。
1.1 相对相位偏差
TLE轨道的更新频率约为每天一次,当卫星轨道维持控制周期大于一天时,可以采用相对相位偏差分析法对卫星平半长轴变化量进行分析,分析精度随控制周期的增长而提高。
由于星座中各个卫星平半长轴不完全相等,所以不同卫星轨道的角速度存在差异,进而引起卫星之间相位差的变化,通过测量卫星之间的相位差,可以反演其平半长轴差。设卫星的理论平半长轴为a,不同卫星的平半长轴差为∆a,若经过时间t后两卫星的相位差为∆u,则平半长轴差为

其中,µ为地球引力常数。
对于非合作目标,如果位置误差都在切向,对于500 km 高度的轨道,经过1 天时间如果相位偏差改变量为∆u= 0.008 33◦,则平半长轴偏差为∆a=6.97 m。
1.2 摄动轨道偏置
由于初始轨道捕获阶段各卫星变轨时间不同步,通过对轨道倾角进行偏置,可以调整升交点赤经变化速率,使组网完成后同一轨道面卫星的升交点赤经基本相同。升交点赤经漂移速率计算公式为

其中,J2为地球扁率摄动系数,Re为地球赤道半径。由于巨星座卫星轨道的偏心率很小,忽略偏心率的变化影响,升交点赤经漂移率对半长轴和倾角求全微分得

式(3)给出了半长轴和倾角偏置对升交点赤经变化率的影响。对于备份星来说,为了安全考虑其高度要不同于工作星轨道高度,为了保持共面,就需要倾角做出相应的偏置,满足

2 铱星星座
2.1 铱星初始轨道捕获控制分析
铱星入轨轨道高度约为613.8 km,通过卫星轨道机动进入774.63 km 的工作轨道。铱星采用了共面发射、异面组网的方式进行组网,第8 次发射的10 颗卫星中,9 颗(3 颗为备份星)部署在同一轨道面,另一颗部署在其东侧相邻轨道面。图1∼图3给出了6 颗工作星(167, 168, 171, 172, 173, 180)初始轨道捕获过程中平半长轴、平倾角和平升交点赤经的变化过程。
由图1 和图2 可以看出,卫星在发射后第25 天完成了初始轨道捕获。铱星在改变半长轴的过程中,同时改变轨道倾角,使升交点赤经漂移速率保持不变,由图3可以看出,6颗卫星的平升交点赤经同步变化,组网完成后6 颗卫星轨道严格共面,平升交点赤经差最大约为0.01◦。

图1 铱星6 颗工作星平半长轴变化过程
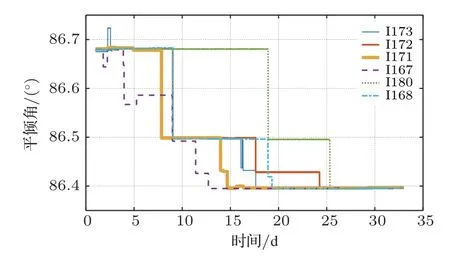
图2 铱星6 颗工作星平倾角变化过程

图3 铱星6 颗工作星平升交点赤经变化过程
2.2 铱星备份星策略
铱星共有9颗备份星(105,115,124,161,162,169,170,175,176),其中105号星位于工作轨道,紧跟在164 号星之后,与164 号星的相位差保持在0.40◦∼0.64◦。其他8 颗备份星位于各自轨道面工作星轨道下方,采用倾角偏置的方式,使轨道升交点赤经漂移速率与工作星相同。表2 给出了8 颗备份星和所在轨道面工作星2019 年12 月1 日12 时(北京时间)的平半长轴、平倾角,代入式(4)可知备份星与所在轨道面工作星升交点赤经漂移速率相同。以115号星为例,其相对130号工作星的半长轴偏置量是−29.934 km,理论倾角偏置量是0.052 8◦,实际倾角偏置量是0.053 0◦。

表2 备份星和所在轨道面工作星平半长轴、平倾角
2.3 铱星维持控制分析
从铱星每个轨道面各选一颗工作星(140,116,173,100,154,102),图4 给出了2019 年3 月1 日至12 月31 日各星的平倾角变化情况。可以看出各星的平倾角基本相同,同时工作轨道卫星的平半长轴相同,保证了升交点赤经漂移速率相同,使星座的构型长期保持稳定。

图4 铱星6 颗不同轨道面工作星平倾角变化过程
图5 给 出 了2019 年9 月1 日 至12 月1 日173 号星相对于117 号星和172 号星的实际相位差与理论相位差(32.727◦)的偏差变化情况。

图5 173 号星相对117 号星和172 号星实际相位差与理论相位差的偏差
图5 中相位偏差发生转折的位置存在突变,是由于TLE更新后的轨道历元晚于变轨时刻。可以看出铱星相邻卫星的相位偏差保持在±0.2◦以内,仿真可知铱星轨道面交点处最小相位差约为1.53◦,所以,±0.2◦的精度保证了星座内卫星在轨道面交点处的安全。图5 中的转折点,是由于卫星实施了轨控,使半长轴发生变化,导致该卫星与其他卫星的相位偏差变化趋势产生明显变化。根据图5 中的一条曲线,仅可以判断两个卫星中的某一个半长轴发生了改变,但不知道具体哪个卫星实施了轨控,通过对比173 号星和其相邻的117 号星和172 号星的相位偏差变化情况,在图5 中两条曲线同时发生转折的位置,基本可以肯定是由173 号星变轨引起的,可知173号星在第19天和第70天共进行了2 次升轨,第71天进行了1次降轨。
由图5 可知,173 号星和117 号星从第1 天到19 天的相位偏差变化量为0.139◦,平均每天变化0.007 72◦,代入式(1)可知,173 号星变轨前平半长轴比117号星低约7.12 m。173 号星和117号星从第20天到32天的相位偏差变化量为0.113◦,平均每天变化0.009 42◦,代入式(1)可知,173号星变轨后平半长轴比117号星高约8.69 m,所以173号星在第20天的平半长轴改变量约为15.81 m。第70 天升轨控制量可能较大,所以,第71天进行了一次降轨,由于这两次变轨时间间隔约为1 天,难以通过相位偏差计算具体的半长轴改变量。由第34至第70天数据可以计算出173 号星平半长轴比117 号星低约4.67 m,由第72 至第88 天数据可以计算出173 号星平半长轴比117号星高约16.09 m,可知173号星第70和71天的综合控制效果为平半长轴抬高约20.76 m。铱星维持控制的半长轴改变量在20 m左右。
经统计,173 号星所在轨道面工作星在2019 年9 月1 日至12 月1 日的维持次数如表3 所示。由表3可知,在91天中,该轨道面11颗卫星的平均维持次数为3.36,每个卫星平均27.08天维持一次,大多数为升轨控制,维持控制量多数在20 m左右,少数升轨控制量较大,紧接着会进行降轨控制,可能的原因是为了碰撞规避。受大气阻力影响,铱星平半长轴平均每天下降约0.5 m,30 天下降约15 m,可知铱星轨道维持主要目的是将平半长轴维持在理论值附近。理论上除了碰撞规避之外,卫星维持只需要补偿大气作用下的半长轴衰减,所以平均每个月的维持控制量应该是15 m左右,然而实际控制量却接近20 m,说明半长轴控制误差约为5 m。

表3 铱星工作星维持次数
3 一网星座
3.1 一网初始轨道捕获控制分析
一网入轨轨道高度约为995 km,通过卫星轨道机动进入1200 km 的工作轨道。图6∼图8 给出了6颗工作星(06, 07, 08, 10, 11, 12)初始轨道捕获过程中平半长轴、平倾角和平升交点赤经的变化过程。
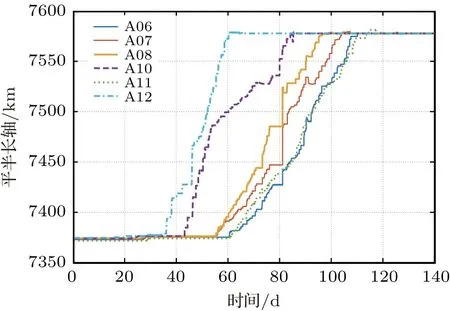
图6 一网6 颗工作星平半长轴变化过程
由图6和图7可以看出,卫星在发射后第120天完成了初始轨道捕获。由图6 可见,轨道半长轴处于连续抬升的过程,持续大约30天到60天不等。一网卫星在改变半长轴的过程中,基本同时改变轨道倾角,使升交点赤经漂移速率基本保持不变,由图8可以看出,6 颗卫星的平升交点赤经基本同步变化,组网完成后6 颗卫星轨道严格共面,平升交点赤经差最大约为0.01◦。

图7 一网6 颗工作星平倾角变化过程
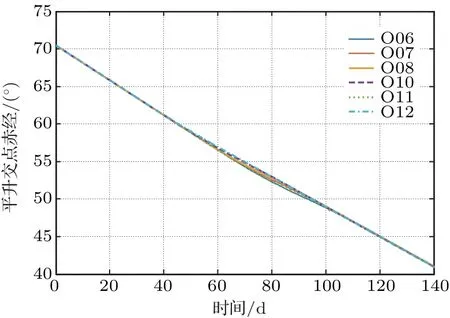
图8 一网6 颗工作星平升交点赤经变化过程
3.2 一网维持控制分析
图9给出了2019年10月1日至12月1日,一网06 星相对于07 星和11 星的实际相位差与理论相位差(7.347◦)的偏差变化情况。

图9 06 号星相对07 号星和11 号星实际相位差与理论相位差的偏差
由图9 可以看出,一网相邻卫星的相位偏差保持在±0.2◦以内。图9中共有4个共同的转折点,是由于06星实施了轨控,使半长轴发生变化,导致该卫星与其他卫星的相位偏差产生明显变化。一网卫星的维持周期约为15 天,半长轴控制量约为20 m,升轨控制和降轨控制交替进行。
经统计,一网的6颗卫星在2019年10月1日至12月1日的维持次数如表4所示。
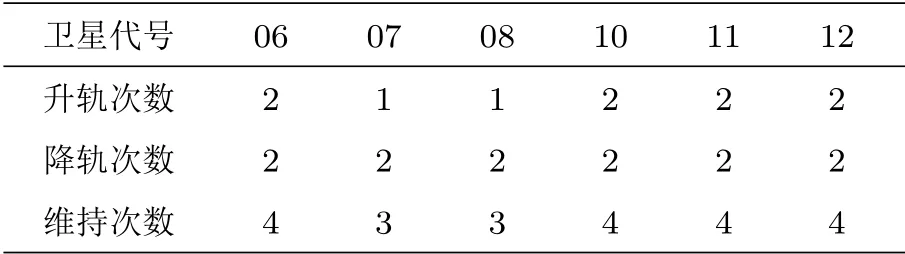
表4 一网卫星维持次数
由表4 可知,在61 天中,6 颗卫星的平均维持次数为3.67,每个卫星平均16.6 天维持一次。一网卫星所在轨道高度受大气阻力影响很小,平半长轴衰减较慢,卫星轨道维持控制主要用于相位保持。也就是说,20 m 的半长轴控制量主要用来抵消上一轮控制的误差,如果能降低平半长轴控制误差,就能大幅降低控制频率。
4 星链星座
4.1 星链初始轨道捕获控制分析
星链第0 批卫星入轨高度约为440 km,通过卫星轨道机动进入550 km的工作轨道。部分卫星未能进入工作轨道,图10∼图12给出了主轨道面卫星的初始轨道捕获过程中平半长轴、平倾角和平升交点赤经的变化过程。

图10 星链主轨道面卫星平半长轴变化过程
由图10 可以看出,星链卫星在发射后第40 天基本完成了初始轨道捕获。在卫星调整半长轴的过程中,多数卫星轨道倾角基本保持不变,由于卫星半长轴调整时间存在差异,使不同卫星轨道升交点赤经漂移速率产生不同,第40天时,不同卫星轨道平升交点赤经差最大约为2◦。对于高度440 km、倾角53◦的轨道,若使升交点赤经漂移速率不变,半长轴抬升110 km对应的倾角负偏置量约为2.5◦,所需的速度增量消耗较大。

图11 星链主轨道面卫星平倾角变化过程

图12 星链主轨道面卫星平升交点赤经变化过程
4.2 星链维持控制分析
54 号、37 号、24 号和55 号为相邻的4 颗卫星,图13 给出了2019 年9 月1 日至11 月1 日,4 颗相邻卫星之间的实际相位差与理论相位差(6◦)的偏差变化情况,图14∼图17给出了4 颗卫星平半长轴变化情况。
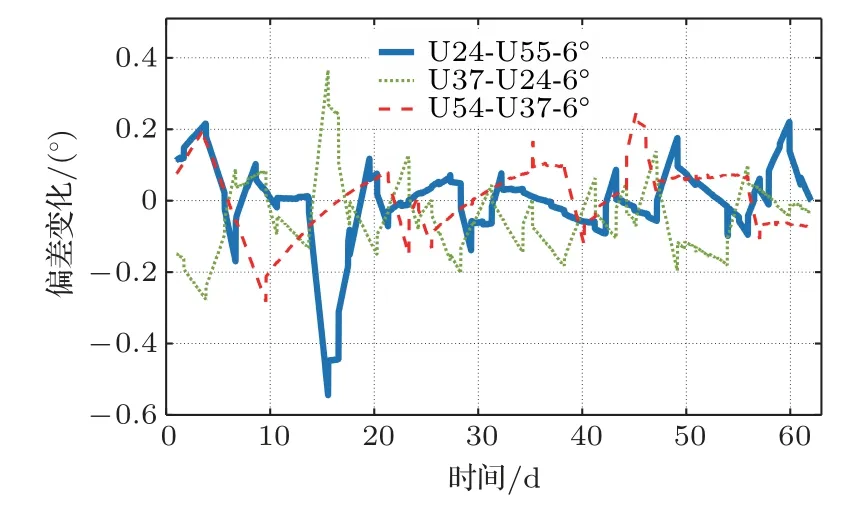
图13 星链4 颗卫星实际相位差与理论相位差的偏差
由图13 可以看出,星链相邻卫星的相位偏差多数时间保持在±0.2◦以内,相位偏差变化比较大的一次接近了0.5◦,很大的可能是碰撞规避造成的。由图14∼图17 可以看出,卫星的维持控制比较频繁,半长轴改变量大于50 m 的控制各有13, 17, 11,7次,最大半长轴改变量约为240 m。由于卫星轨道高度较低,受大气阻力影响,平半长轴衰减较快,平均每天衰减约10 m,卫星主要通过升轨控制进行高度维持,但部分降轨控制规律性较差,降轨后一般紧接着会进行升轨控制,导致维持控制较为频繁。

图14 55 号星平半长轴

图15 24 号星平半长轴

图16 37 号星平半长轴
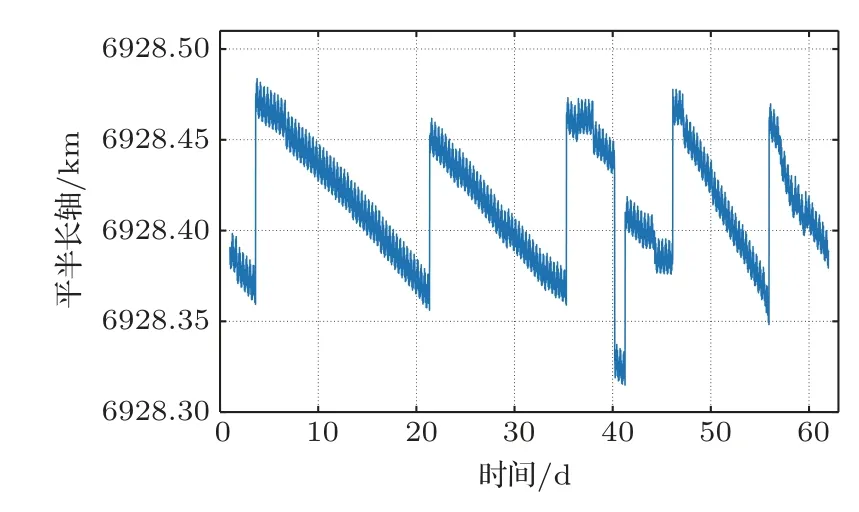
图17 54 号星平半长轴
5 结论
本文分析了铱星、一网和星链三个典型巨星座的TLE 数据,主要通过相对相位偏差的分析反演平半长轴的控制频率和控制精度,得到的主要结论如下:
(1)新一代铱星相邻卫星相位差维持在理论值的±0.2◦以内,单星维持控制频率平均约为27.08天,半长轴维持控制量约为20 m;一网相邻卫星相位差维持在理论值的±0.2◦以内,单星维持控制频率平均约为16.6 天,半长轴维持控制量约为20 m;星链第0 批卫星相邻卫星相位差多数时间维持在理论值的±0.2◦以内,单星维持控制较频繁,半长轴维持控制量较大。
(2)为了安全性以及快速补位的需要,备份星的轨道高度通常低于工作星轨道,为了保持升交点赤经漂移速率的同步,相对于工作星轨道倾角都做了相应的偏置。
(3)每次维持控制的目的主要有三个。 1抵消大气阻力,轨道高度1000 km 以上不明显,比如一网,而星链的高度上这种维持目的是主要的; 2定轨、控制量计算以及控制执行机构的偏差导致的轨道不断维持。轨道高度较高、大气阻力很小时,主要的控制量都来源于修正上一轮控制后累积的轨道偏差,比如位于1200 km 高度的一网。由于高度相近,一网的控制对我们国家的星座建设管理参考价值相对较大; 3碰撞规避,铱星和星链都存在升轨之后紧随降轨的情况,这时相位控制精度可能会下降,比如星链的控制,碰撞规避对维持精度的影响也是一个值得注意的问题。
(4)三个公司的星座维持控制都有升轨控制和降轨控制,我国互联网星座亦应具备升轨和降轨控制能力。
猜你喜欢
现代经济信息(2022年35期)2023-01-11
装备维修技术(2022年3期)2021-12-06
中学数学研究(广东)(2021年19期)2021-11-19
太空探索(2020年9期)2020-09-16
中学数学研究(江西)(2019年12期)2020-01-10
北京航空航天大学学报(2019年9期)2019-10-26
太空探索(2017年7期)2017-07-25
百科探秘·航空航天(2016年3期)2016-11-07
太空探索(2016年12期)2016-07-18
航天返回与遥感(2012年4期)2012-01-14
