低速范围内的异步电动机直接转矩控制方法探究
2020-05-21 10:01宋晓君孙洪伟
科技创新与应用 2020年15期
宋晓君 孙洪伟

摘 要:异步电动机直接转矩控制技术有运算量小、控制系统结构简单、动态性能好等突出优点,也存在低速性能较差,稳态时转矩的脉动大的主要缺点。本课题浅要分析减小异步电动机直接转矩控制系统转矩脉动的方法,包括直接转矩无差拍控制、使用PI调节器的直接转矩控制(PI-DTC)以及改进的开关表法等。
关键词:直接转矩控制;低速范围内减小转矩脉动方法;异步电动机
中图分类号:TM343 文献标志码:A 文章编号:2095-2945(2020)15-0164-02
Abstract: The direct torque control technology of asynchronous motor has many outstanding advantages, such as small amount of calculation, simple control system structure, good dynamic performance and so on. It also has the main disadvantages of poor performance at a low speed and large torque ripple in steady state. The purpose of this paper is to analyze the methods to reduce the torque ripple of asynchronous motor direct torque control system, including direct torque deadbeat control, direct torque control using PI regulator (PI-DTC), improved switch meter method and so on.
Keywords: direct torque control; method of reducing torque ripple in low speed range; asynchronous motor
当今用电系统中,异步电动机作为最常见的动力设备广泛用于工农业生产、科技国防及社会生活的方方面面。异步电动机的物理模型是一个高阶、多变量、强耦合、非线性的系统,其描述需用一组非线性方程组,控制起来较有难度。目前常用的调速技术有恒压频比控制方式、直接转矩控制、矢量控制等。相比其他控制技术,直接转矩控制突出的优点是运算量小,控制系统结构简单,动态性能更好,鲁棒性更强。直接转矩控制技术存在的主要问题是目前理论上不成熟,经典模型存在固有缺陷,低速性能较差,稳态时转矩的脉动大。本课题研究的目的是针对异步电动机直接转矩控制系统在低速范围内转矩脉动大的问题寻求解决之道。
直接转矩控制技术是20世纪80年代中期继矢量控制技术后发展起来的一种新型异步电动机变频调速技术。其基本工作原理是把转矩作为被控量直接进行控制,根据定子磁链和输出转矩直接选择相对合适的电压矢量,通过电压空间矢量来控制定子磁链的旋转速度从而改变定子、转子磁链矢量之间的夹角,进而实现对电动机转矩的控制。系统工作时不需转矩电流和励磁电流的参与,通过定子磁链即可实现对电磁转矩的控制。
直接转矩控制技术最大的缺点是低速时转矩脉动比较大。现就如何减小低速范围时转矩脉动大的问题做方法探究。
1 使用PI调节器的直接转矩控制(PI-DTC)
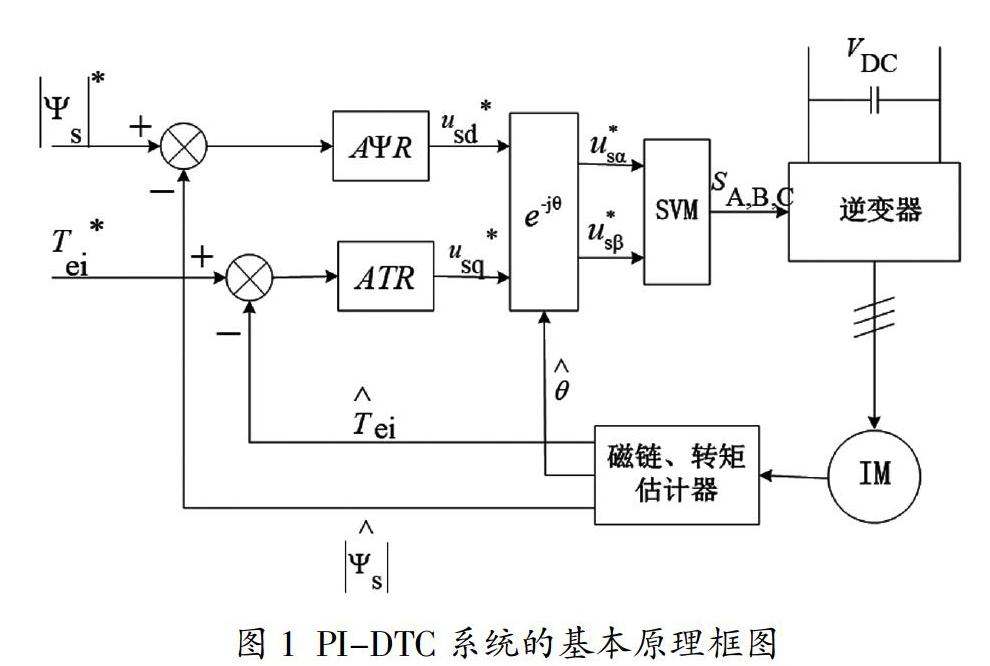
该系统中的调节器采用PI控制规律,如图1所示(包括磁链调节器AΨR和转矩调节器ATR)。
由于PI-DTC使用PI调节器,其输出具有连续性,转矩脉动大大减小。和SFOC(根据定子磁场实现定向的一种矢量控制)相比,PI-DTC不需要解耦器,而SFOC必须通过解耦器对转矩、磁链解耦,因而该算法计算量小、鲁棒性强。
该法主要缺点是若调节器参数设定不合适,系统性能会变差,而且调节器的参数不能用线性系统理论设定。
2 直接转矩无差拍控制
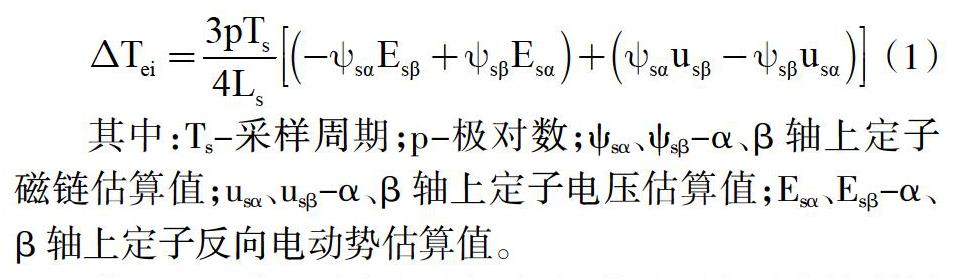
该方法基于离散化直接转矩控制系统。据异步电机数学模型,电机各物理量与转矩控制误差?驻Tei数学关系为:
其中:Ts-采样周期;p-极对数;?鬃s?琢、?鬃s?茁-?琢、?茁轴上定子磁链估算值;us?琢、us?茁-?琢、?茁轴上定子电压估算值;Es?琢、Es?茁-?琢、?茁轴上定子反向电动势估算值。
若us?琢、us?茁满足式(1)要求,转矩误差可在下个控制周期消除。
若能使us?琢、us?茁满足下式(2)中关系,则磁链模值误差可在下个控制周期消除:
其中,?鬃s是磁链模值给定值。
若能使us?琢、us?茁同时满足式(1)和式(2)要求,则对应的值就能消除转矩误差以及磁链模值误差,直接转矩无差拍控制方法就是通过解方程式(1)和(2),得出相应的us?琢、us?茁值。
如果该方程组无解,则分别判断是否存在满足转矩要求及磁链要求的电压矢量,若都不存在,可按照直接转矩控制系统的控制方法选择电压矢量。
理论上,该方法能在一个控制周期消除定子磁链模值以及电磁转矩误差,转矩脉动也可消除,电机能在极低速下正常运行,还提高了开关频率,电压谐波和电机噪声得以减小。
该方法缺点是计算量大,实现难度高,依赖电机参数性比较强。
3 改进的开关表法
该法区间划分如图2,其中,电压空间矢量的选择是通过空间矢量脉宽调制((SVPWM)方法。
SVPWM方法中,空间电压矢量信号的选择要综合磁链开关信号、区间号等,最终目标是通過8种开关状态对应的基本空间电压向量逼近电机所需的电压向量,对应关系见表1。
如:假设磁链在某时刻在区间s1,若磁链开关信号是“0”,转矩开关信号是“1”,则要求减小磁链、增大转矩,经表判断,给定子施加电压矢量us2;若转矩开关信号为“0”,应该给定子施加零状态电压;若磁链开关信号为“1”,转矩开关信号为“1”,应增加磁链和转矩,经表判断,给定子施加电压空间矢量us1;同理可选择其他情况下的电压空间矢量。
4 新型转矩控制器
该新型转矩控制器针对传统控制系统中由于滞环比较器产生转矩脉动的问题,可提供恒定转矩开关频率。其结构如图3所示。其输出为1,0和-1三种状态,用q(t)表示其转矩的误差状态,即:
用d(t)表示q(t)的平均值,我们称之为连续占空比,该值在-1到1间。
5 结束语
本课题提出了异步电机的基本工作原理及优缺点,并对低速运行时转矩脉动大的问题提出了几种解决方法,这几种方法的实现各有优缺点,应根据实际应用加以选择并进行改进。
参考文献:
[1]赵朝星,申群太.一种改进的直接转矩磁链和转矩方法研究[J].科学技术与工程,2008(03):660-663+671.
[2]崇鑫.减小转矩脉动的异步电机直接转矩控制系统研究[D].西安理工大学,2007.
[3]张德宏,等.永磁同步电机直接转矩控制理论基础与仿真研究[J].中国新技术新产品,2010(15):11.
猜你喜欢
科学家(2022年3期)2022-04-11
新传奇(2020年48期)2020-12-28
食品界(2019年5期)2019-05-23
阅读(低年级)(2018年5期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
魅力中国(2016年52期)2017-09-01
科技创新导报(2017年7期)2017-06-03
现代畜牧科技(2015年11期)2015-10-21
科技与创新(2015年10期)2015-07-07
少年文艺·少年读者文摘(2014年1期)2014-02-27