
欧洲业务集合预报系统进展
2020-06-03 03:43陈超辉王勇杜钧何宏让刘宇迪姜勇强
陈超辉 王勇 杜钧 何宏让 刘宇迪 姜勇强
(1 国防科技大学气象海洋学院,南京 211101;2 奥地利气象局,维也纳 奥地利 1190; 3 美国国家海洋大气局国家环境预报中心,美国 马里兰 20740)
0 引言
天气预报能带来大量的社会效益,无论是极端天气预警,还是农业规划[1]。目前实现这一目标的主要手段是运用建立在复杂数理基础上的数值天气模式以及各种常规和遥感技术获取的大量观测资料通过大规模超级计算机产生的数值天气预报。但由于高度非线性大气运动所具有的混沌特性,数值预报模式初值的微小误差或者模式自身误差都可能导致单一确定性数值预报结果与实况天气之间存在较大偏差[2]。
为此,27年前欧洲中期天气预报中心ECMWF(European Centre for Medium-Range Weather Forecasts)[3-4]和美国国家环境预报中心NCEP(National Centers for Environmental Prediction)[5-6]发布了人类历史上首批业务集合预报。随后,加拿大气象局MSC(Meteorological Service of Canada)在1996年也开始发布业务集合预报,随后世界上其他气象中心,如法国、英国、日本、澳大利亚、南非等国也先后进行了跟进,中国气象局国家气象中心也于1996年5月下旬开始着手并建立集合预报业务[7]。发展至今,集合预报不仅用于模式的预报过程,即为中短期、月尺度和季节性时间尺度提供预报预测,还用于模式的分析过程,为整个地球系统提供更好的初始状态估计。大量学者也针对其进展进行了详细梳理。例如,杜钧[8]综合论述了集合预报的概念、基本问题与集合预报应用及发展前景;孔凡铀[9]针对雷暴尺度天气集合数值预报所面临的科学问题、主要构造技术、研究现状及存在的问题等做了力所能及的探讨;李泽椿等[7]回顾了国家气象中心集合数值预报系统的开发过程、业务系统组成和集合预报产品的解释与应用等;陈静等[10]系统总结了集合预报概念、系统组成、初始扰动理论以及产品解释与应用方面的研究。此外,王晨稀[11]、段明铿等[12]、麻巨慧等[13]和张涵斌等[14]分别从热带气旋集合预报研究、集合预报方法研究、NCEP与ECMWF及CMC三家极具代表性的全球集合预报业务系统、区域集合预报扰动方法研究等不同视角梳理了集合预报的工作进展。
总体而言,这些文献主要聚焦集合预报初始扰动技术、模式扰动技术、多模式集合预报、集合预报产品与检验等方面,理论归纳相对较多,而专门针对业务系统发展与应用的相对较少;再者,对于欧洲业务集合预报,行业内注意力几乎全部集中在欧洲全球中期业务集合预报,而对于欧洲范围内的有限区域高分辨集合预报业务关注甚少;此外,还存在一个重要的事实,即欧洲业务集合预报相比世界其他气象中心的业务集合预报存在明显的优势,并将这种优势奇迹般地保持至今。基于上述背景分析,从业务发展与应用角度进行欧洲业务集合预报归纳并梳理(包括全球业务集合预报与有限区域高分辨业务集合预报)显得十分必要。作者认为研究与借鉴欧洲业务集合预报的发展思路,不仅对集合预报理论创新有帮助,还对开展集合预报业务有重要意义。
本文包括以下3 部分内容:第1 部分是关于ECMWF全球业务集合预报历史沿革及发展概况;第2部分描述欧洲主要国家的有限区域高分辨业务集合预报系统;最后一部分概要介绍欧洲集合预报的动态,仍存在的问题、挑战及未来方向。
1 ECMWF全球业务集合预报历史沿革及发展概况
ECMWF作为一个具有广泛影响力的世界气象中心,如何客观看待其发展,十分重要。当前大部分的注意力主要集中于集合预报理论与方法总结,本节内容以一种全新的视角看待欧洲业务集合预报的发展,即从集合预报业务系统整体升级的角度进行探讨。欧洲业务集合预报狭义上是指欧洲中期天气预报中心提供的全球中期业务集合预报,它的出现使得预报员和用户不仅能够获得未来大气状态,还能针对未来大气可能出现的情况进行可靠性与准确性估计。其发展、实施与运维主要归功于ECMWF及其成员国许多人的工作,也归功于多年来与ECMWF一起工作以了解其性能并进一步提高集合预报业务水平的世界各国访问学者的工作。这里主要以业务系统配置升级为主线,讨论ECMWF如何从1992年第1次集合预报开始,发展到今天的水平,包括集合预报系统的五个关键特征,即用来模拟初始不确定性的方法、用来模拟模式不确定性或模式近似的方法、集合预报系统水平和垂直分辨率、预报时效、集合预报成员个数。
表1给出了从1992年11月至2019年6月的ECMWF全球业务集合预报系统的关键特征随时间的升级演变,易知ECMWF集合预报进行了数次升级。第1列表示配置升级时间,第2列表示系统升级特征的关键字描述,第3列至第8列分别为刻画初值不确定性的初始扰动关键特征:水平分辨率、垂直层数、用于计算奇异向量的最优时间间隔、优化区域、前区增长不确定性和后区增长不确定性的模拟方法。第9列至第15列代表预报阶段的系统关键特征:水平分辨率、垂直层数、预报时效(以d为单位)、集合成员个数、模式不确定性处理方法、与海洋模式耦合以及回报套件的规模(以成员和年份为度量单位)等。

件20a 20a 20a 20a 20a 20a 套报NO NO NO NO NO NO NO NO NO NO NO NO NO NO NO回耦合否NO NO NO NO NO NO NO NO NO NO NO NO NO NO NO是HOPE from d10 1×5×18a HOPE from d10 1×5×18a HOPE from d10 1×5×18a HOPE from d10 1×5×18a NEMO from d0 2×11×NEMO from d0 2×11×置 性配式定模确NO统NO NO NO NO NO NO STP STP STP STP STP STP STP STP STP STP revSTP revSTP系不revSTP revSTP报预和 成个员数33 33 33 33 33 51 51 51 51 51 51 51 51 51 51 51 51 51 51 51 revSTP+BS HOPE from d10 1×5×18a 51 revSTP+BS NEMO from d10 1×5×18a 51 revSTP+BS NEMO from d10 1×5×20a 51 revSTP+BS NEMO from d0 1×5×20a 51 revSTP+BS NEMO from d0 2×11×51 revSTP+BS NEMO from d0 2×11×51 revSTP+BS NEMO from d0 2×11×51 revSTP+BS NEMO from d0 2×11×51 51计性估报效预时定10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 15 d 15 d/32 d 确15 d/32 d 15 d/32 d 15 d/32 d 15 d/32 d 15 d/32 d 15 d/32 d 15 d/32 d 15 d/46 d 15 d/46 d 15 d/46 d 15 d/46 d 15 d/46 d 15 d/46 d 不式层模垂直L19 L19 L19 L19 L19 L31 L31 L31 L40 L40 L40 L40 L40 L62 15) L62 15) L62 15) L62 15) L62 15) L62 15) L62 15) L62 15) L62 15) L91 15) L91 45) L91 45) L91 45) L91 45) L91 45) L91化 变格平T63 T63要T63 T63 T63主TL159 TL159水TL159 TL159 TL255 TL255 TL255 TL255 TL399配的置报预 性距合区定后确集不SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI TL399(0~10)/TL255(10~SVINI TL399(0~10)/TL255(10~SVINI TL399(0~10)/TL255(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~15)/TL319(15~SVINI TL639(0~15)/TL319(15~SVINI TL639(0~15)/TL319(15~SVINI TL639(0~15)/TL319(15~SVINI TL639(0~15)/TL319(15~务业 性区定球前确NO NO NO NO NO 1 ECMWF全EDA)不Table 1 Time evolution of some key characteristics of the ECMWF operational global medium-range ensemble (OG-ENS) between inception (November 1992) and today (June 2019)SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO 10*EDA 10*EDA 10*EDA 10*EDA 25*EDA 25*EDA 25*EDA 25*EDA 25*EDA 25*EDA 50*EDA(SVs和globe 化域计优区NHx NHx NHx估(NH+SH)x(NH+SH)x(NH+SH)x(NH+SH)x(NH+SH)x(NH+SH)x表性定(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC确不始化隔优间36 h 36 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48h 48h 48h 48h 48h 48h 48h 48h 48h 48h 48h 48h 48h 48h初直数垂层L19 L19 L19 L19 L19 L31 L31 L31 L40 L40 L40 L40 L40 L62 L62 L62 L62 L62 L62 L62 L62 L62 L91 L91 L91 L91 L91 L91 L91 平率水辨分T21 T21 T21 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42述描字键关Oper Impl SV LPO SV OTI SV hor resol NH+SH SV resol/mem EVO SV Stoch sch SPPT vert resol FC hor resol TC SVs sampling rev sampl resolution VAREPS VAREPS mon Rev SPPT hor resol EDA EPS Rev Stoch scheme New ocean model Rev EDA-pert & refc suite vert resol & coupling from d0 Extension to 46d and REFC suite to 22m T42 hor resol Ocean (Horizontal & vertical)Rev EDA Model error changes Rev DA /mem月/年 间时199212 199302 199408 199503 199603 199612 199803 199810 199910 200011 200201 200409 200506 200602 200609 200803 200909 201001 201006 201011 201111 201206 201311 201505 201603 201611 201707 201806 201906
由表1知,1992年12月ECMWF正式开展集合预报业务,集合预报一周运行3次,即每周五、周六、周日00时(世界时,下同)开始运行,初值扰动范围覆盖全球,初值不确定性仅采用初始奇异向量模拟,其水平与垂直分辨率分别为T21和L19,奇异向量计算优化时间间隔为36 h,初始扰动集合正负成对分布;在预报阶段,预报模式分辨率为T63L19 (约320 km),预报长度为10 d,系统包括33个集合成员,不考虑模式不确定性、不考虑与海洋或海冰模式耦合,也不考虑回报套件。1993年2月,为了处理奇异向量主要集中在南半球的问题,ECMWF引入了局地投影运算算子(Local Projector Operator,LPO),使得奇异向量分布在北半球,这对北半球集合预报的可靠性有重大影响。1994年8月,ECMWF为了改善集合离散度,计算奇异向量的优化时间间隔(optimization time interval,OTI)从36 h增加到48 h,从而改善了超出OTI以外的扰动增长,并从1994年5月1日起,于每日00时生成一次集合预报。1995年3月,ECMWF计算SVs的水平分辨率提高到T42,水平分辨率的提高改善了扰动增长,从而提高了集合预报的可靠性。1996年3月,ECMWF为解决南半球的扰动增长,引入了一套新SVs,它对南半球的集合预报可靠性有重大影响。1996年12月,集合预报的预报阶段模式分辨率提高到TL159L31(约120 km),成员个数从33个增加到51个。1998年3月,ECMWF开始引入演化SVs[15](Evolved Singular Vectors,简称EVO SVs),演化SVs主要模拟起报时间前两天的误差增长效果,实践表明初始SVs加入演化SVs能够改善集合预报离散度,尤其在较短预报时效范围内效果显著。1998年10月,ECMWF开始考虑与物理参数化相联系的模式不确定性问题,引入了随机扰动参数化倾向方案[16](Stochastic Perturbed Parameterization Tendency,SPPT),这种方案在整个预报长度范围内,对改善集合预报系统离散度和可靠性有显著效果,尤其是在热带地区。1999年10月,计算SVs的模式垂直层数从31层增加到40层。
2000年11月,集合预报系统水平分辨率从TL159提高到TL255(约80 km)。2002年1月,ECMWF增加了容易出现热带低气压的热带地区SVs,效果表明这种方案能够改善热带地区的集合离散度,尤其在出现热带风暴的天气背景下。2004年9月,ECMWF在集合预报初始扰动生成阶段采用的采样策略更改为高斯采样[17],并于2005年6月改进了高斯采样方法。2006年2月,集合预报系统水平分辨率开始从TL255L40提高到TL399L62(约60 km)。2006年9月,ECMWF基于可变分辨率集合预报(Variable Resolution Ensemble Prediction System,VAREPS)思路[18]将集合预报长度延至15 d,即在第10天预报模式分辨率从TL399切换至TL255。2008年3月开始,ECMWF基于VAREPS技术将中期集合预报与月尺度集合预报进行合并;在这以前,这两个业务系统一直独立运行。新合并系统针对短时效的小尺度和恶劣天气事件,以及15 d的大尺度预报提供每天2次运行;而对于预报长度达到32 d的大尺度预报每周1次运行[18-19]。此外,从第10天开始,集合预报系统与动力海洋模式HOPE(Hamburg Ocean Primitive Equation)相耦合,同时引入1个每周1次运行的由5个集合成员组成的过去18年的集合预报回报套件。平均结果表明,使用这种新的组合系统,温带地区的月预报得分略高。特别是新系统能对极端事件产生更好的月尺度预测,如2003年欧洲热浪或2007年英格兰的潮湿夏季。然而,热带地区的月预报得分略低于以前的系统,很可能是因为在预报的前10 d缺乏海洋大气耦合。2009年9月,ECMWF修正了随机模式误差方案。
2010年1月,ECMWF集合预报系统的预报阶段模式水平分辨率在前10 d从TL319增加到TL639 (约35 km),从第10天到第32天的水平分辨率从TL255增加到TL319(约70 km)。2010年6月,ECMWF在集合预报系统中引入了一组由10个集合数据同化成员构成的新型初始扰动,并取代了演化SVs,效果表明基于集合数据同化的扰动能够改善与资料同化循环相联系的扰动刻画,从而导致集合离散度提高,且在短期预报时效与热带地区的效果尤其明显。2010年11月,刻画模式误差方面,ECMWF引入了第二种方案,即采用随机动能后向散射方案SKEB方案[20](Stochastic Kinetic Energy Backscatter)来模拟次网格尺度能量升尺度转换过程中存在的不确定性。2011年11月,ECMWF引入了新的海洋模式,即选用分辨率为1°(约100 km)的NEMO(the Nucleus for European Modelling of the Ocean)取代了HOPE模式,集合预报长度延长至32 d,并且每周开始运行2次(每周一和周四00时)。2012年6月,ECMWF对基于集合数据同化的扰动进行了改进,引入了近地面变量扰动,并且回报套件被扩大到涵盖过去20年。2013年11月,初始扰动计算阶段,模式垂直层数从62层增加到91层,集合预报阶段与海洋模式耦合也从第10天移到了第0天,使得热带地区天气现象预测效果取得重大进步,例如MJO(Madden-Julian Oscillation)现象。2015年5月,集合预报时间长度从32 d延长到46 d,回报套件扩大到每周2次 (每周一和周四00时)运行的涵盖过去20年的11个成员集合预报。2016年3月,第1天至第15天,集合预报模式分辨率提高到了TCo639L91(立方八面体网格,约18 km),从第15天到第46天,模式分辨率增加到了TCo319L91(约36 km)。2016年11月,集合预报系统所使用的海洋模式分辨率从1°提高到0.25°(约25 km),垂直层数从42层增加到75层,并且引入了交互式海冰模式LIM2,使得海冰覆盖能够动态演变。同时针对SPPT方案中扰动倾向进行了全局修正,以改善全局动量、能量和湿度守恒特性。2017年7月,ECMWF改善了来自集合数据同化系统的湿度背景误差方差,修正了背景误差方差小波滤波,并为了改善热带气旋结构改进了4DVAR中下投式探空仪风场观测的质量控制。另外,预报模式采用了具有较低噪声和更精确的新型高效长波辐射传输方案,对流方案也在较低温度(低至-38 ℃)下增加过冷水。2018年6月,ECMWF在高分辨率(HRES 4d-Var)和集合数据同化分析表面分析中应用了海冰-大气弱耦合同化,计算相对湿度增量采用温度而不再使用虚拟温度。同时为避免模式积分受到冲击,模式误差弱约束强制应用于每个时间步,而不是每个小时。模式误差方面,SPPT方案再次做了修改,通过减少晴空区离散度、激活平流层倾向扰动,改进了“流相关”误差表示,SPPT扰动模态的振幅减小(20%)。同时集合数据同化采用了与集合预报系统一样的 SPPT方案,停用了随机动能后向散射SKEB方案,从而节约了集合预报系统2.5%的计算成本。2019年6月,ECMWF系统采用连续数据同化,4D-Var外循环数量从3层增加到4层,集合数据同化成员也从25个增加到50个。集合数据同化离散度被应用于计算简化扩展卡尔曼滤波的土壤分析雅可比矩阵;热带区域海面温度也引入了弱耦合数据同化。改进了对流方案(夹卷、CAPE闭合、浅对流),考虑了辐射方案中的长波散射过程。集合预报系统基于50个集合数据同化成员生成初始扰动。集合预报系统的辐射时间步长从3 h减少到1 h,与HRES一致。
以上内容仅从业务配置升级方面简要概括了欧洲业务集合预报的发展过程。本质上看,计算成本是驱动集合预报升级的关键因素。从1992年12月至2019年6月,预报阶段主要变化包括:水平分辨率增加了20倍,从大约320 km增加到大约16 km;垂直分辨率几乎增加了5倍,从19个垂直层增加到91个垂直层;预测时间从10 d延长到了46 d[21];集合成员个数从33个增加到51个;集合预报制作的频率也有所增加,当前还开展集合预报回报业务。另外在将近27年的ECMWF配置升级时间轴上,还有一些值得重视的特点:
1)尽管ECMWF越来倾向基于集合数据同化开展集合预报,但SVs在未来几年不太可能被移除。换言之,SVs一直贯穿ECMWF集合预报系统始终直到今天。在ECMWF全球集合预报第1个版本中,采用奇异向量模拟初始不确定性。奇异向量提供了一个非常严谨的理论基础,直到2008年开始使用集合数据同化与奇异向量耦合[22]之前,奇异向量是ECMWF集合预报系统中唯一使用的初始扰动方法。即便到如今,SVs仍然是ECMWF集合预报系统的一个重要组成部分,因为它能不断提供关于初始不确定性的动力相关信息。2008年添加了基于集合数据同化的扰动后,系统能够改善与观测系统特性(观测误差、覆盖范围、可扩展性)相关的初始误差模拟,并自2008年开始,ECMWF 集合数据同化与SVs一直结合使用,以确定中期/月尺度集合预报的初始条件。
2)刻画模式不确定性的方案选用主要以业务效果评估为基准。1999年,ECMWF以加拿大[23]为样例,在集合预报中引入了一个旨在模拟模式不确定性的随机方案SPPT方案[16]。2010年,ECMWF还引入了随机动能反向散射方案SKEB方案来模拟模式无法解析的过程,即模拟从低于模式分辨率的尺度到模式可分辨尺度的升尺度能量转移,该方案事后被证明不能带来任何显著的好处,于2018年关闭。可见ECMWF在系统应用新型理论方面不只做加法,也做减法,一切以业务效果检验为标准。
3)致力于中期、月尺度、季节内尺度和季节尺度集合预报的融合统一与无缝隙。通过使用可变分辨率方法[18-19]和降低超过中期集合预报的模式分辨率,ECMWF能够生成预报长度更长、对集合性能影响最小的月尺度业务集合预报,即实现中期集合预报与月尺度集合预报合并。通过进一步降低分辨率,能够生成业务使用的季节尺度集合预报[24]。同时由于提取延伸期的可预测信号非常困难,ECMWF对这些集合预报补充了集合预报回报套件,这些回报集合通常是较小成员规模的集合,其配置除了集合大小之外,其余均与过去几十年生成的业务集合预报相同。值得记住的是,2006年中期集合预报延长至15 d,2008年集合预报加入月尺度集合预报并延长至32 d,2015年该预报时间进一步延长至46 d。
4)集合预报质量方面稳步提升。由于模式不断升级、数据同化系统不断改进、更多观测数据被使用,以及上述集合预报系统配置的变化,ECMWF集合预报系统性能在过去27年中有了显著提高。图1是从1995年1月至2017年6月北半球500 hPa位势高度集合预报技巧随时间的演变[21]。通过集合预报与业务分析值进行比较,评价指标采用CRPSS度量,它是将集合预报的连续分级概率评分CRPS与参考预报(如气候态)进行比较。对于完美预报而言,CRPSS的值为1,值越大,代表技巧越高;而对于只与气候态统计预报具有相同技巧的预报,则CRPSS值为零。由图1可知,对于刻画自由大气大尺度特征的500 hPa位势高度,集合预报每10年提高约1.5 d。例如,2017年的5 d预报技巧(绿线)和2001年的3 d预报技巧(红线)相当,表示在这16年期间,可预测性增加了约2 d。此外,图1中每条曲线的波峰和波谷呈现出有规律的形态,主要是因为集合预报技巧与季节相关导致的,其中冬季天气往往比夏季天气更容易预报。

图1 1995年1月—2017年6月北半球500 hPa位势高度集合预报CRPSS随时间的演变(参考数据为业务分析值,预报时间为24 h、72 h、120 h、168 h和240 h) Fig. 1 Time evolution, from 1 January 1995 to 1 June 2017, of the Continuous Ranked Probability Skill Score (CRPSS) of ENS forecasts of 500 hPa geopotential height over the northern hemisphere, for lead times of 24 h, 72 h, 120 h, 168 h and 240 h. Forecasts are verified against operational analyses
5)各关键特征的刷新周期不同。表1中的参数概括了ECMWF集合预报系统的主要特征,这些参数主要针对初始不确定性估计与模式不确定性估计及集合预报系统配置两大类。从表1可知,ECMWF产生中期预报的集合预报系统,通常每年至少升级1次,与此不同,用于支撑月尺度或季节尺度的回报套件只是偶尔升级,间隔4~6 a,这种缓慢的刷新一部分是因为需要大量回报结果才能完成预报订正,另一部分是为了向用户提供长期而稳定的服务。此外,表中归类的初始不确定性与模式不确定性估计及集合预报系统配置两个阶段,其技术研发与配置升级相互独立。例如,刻画初始不确定性时,垂直分辨率刷新频率较快,从19层起,31层、40层、62层到91层,而水平分辨率,从T21提高到T42,不再变化;奇异向量计算优化间隔从36 h增加到48 h也不再变动;相反在集合预报阶段,水平和垂直分辨率均根据需要及时刷新。还可发现初始扰动生成方面存在一条理论主线,即从纯粹的初始奇异向量,再到初始奇异向量与演化奇异向量相结合,最终到奇异向量与集合资料同化相结合,即集合预报与资料同化一体化。
2 欧洲范围内主要有限区域业务集合预报系统发展与概况
欧洲集合预报业务发展至今,在世界范围内具有广泛影响力。当前业务部门和预报员的注意力主要聚焦在欧洲中心中期或全球业务集合预报,其实早在1993年,针对潜在恶劣天气的兴趣,在已有的欧洲有限区域模式工作组EWGLAM(European Working Group on Limited Area Modelling)联系基础上成立了短期数值天气预报工作组SRNWP(Short Range Numerical Weather Prediction)。且SRNWP项目从成立时起,就成了欧洲有限区域模式联盟(短期数值天气预报模式主要研发实体单位)相互之间进行合作的主要载体,并从2000年开始,该项目一直在欧洲气象服务网EUMETNET(European Meteorological Services Network)领导下开展工作。这些数值天气预报联盟包括ALADIN (Aire Limitée Adaptation dynamique Développement InterNational)、COSMO(Consortium for Small-scale Modeling)、HIRLAM (High Resolution Limited Area Model)、LACE(Limited Area Modelling in Central Europe)项目和英国气象局。同时鉴于有限区域高分辨集合预报对于提高灾害性强天气的预报准确率具有重要价值,以及探讨欧洲业务集合预报框架的完整性,本节内容主要从业务角度梳理欧洲范围内有限区域业务集合预报系统发展概况,下面分别从SRNWP-PEPS和SRNWP-EPS两个项目以及欧洲主要有限区域业务集合预报系统展开。
2.1 SRNWP-PEPS 短期数值天气预报“穷人”集合预报系统
在欧洲,区域模式早期研发主要由4个联盟组织:HIRLAM、ALADIN、COSMO和英国气象局,而每个联盟都有自己的有限区域模式,这些模式都是当今短期数值天气预报领域的最新技术代表,已被20多个国家气象服务机构用于业务预报。因此,客观存在使用不同模式参数化、不同资料同化技术和不同网格分辨率以及不同区域的多种业务预报,并且这些预报结果都是合理的,这就给预报员带来了巨大挑战,即如何有效利用现有各种业务数值天气预报结果。
2002年,德国气象局产生了将所有可用高分辨率数值预报收集起来开展“穷人”集合预报的想法,理论上可以将来自不同联盟的区域模式短期预报融合成一个在预报预警过程中效果更优的多模式集合预报。因此在欧洲气象服务网理事会会议上,建议在欧洲气象服务网的框架下启动SRNWP-PEPS[25]工程,其主要目标之一就是对“穷人”集合预报进行评估,以确定它能否为预报预警提供重要支撑和改进。2003年6月,欧洲气象服务网SRNWP项目主任Quiby邀请欧洲国家的气象局参加,并启动了该计划。2004年底,德国气象局建立了SRNWP-PEPS业务,包括累积总降水量、累积总降雪、最大10 m风速、最大10 m阵风速度、最高和最低2 m温度,一天四次(00,06,12和18时) 。到2006年,20多个气象服务部门(表略)已经加入了该计划,最终40个确定性和概率预报产品被分发给各贡献成员。
SRNWP-PEPS的主要处理方法是将单个模式预报直接插值到一个参考网格上,即PEPS网格,间距为0.0625°(约7 km),与德国气象局模式范围接近,覆盖欧洲(30°W—30°E,35°N—70°N)区域,见图2。在每个PEPS网格点上,针对集合成员使用最近邻方法计算超过某一阈值的概率。由于每个预报成员具有不同的分辨率和积分区域,所以开展“穷人”集合预报时,成员个数多少取决于网格点位置。如图2所示,不同颜色代表成员个数不同。此外,集合大小还随预报变量而变化(表略),因为不是每个模式都提供每个预报变量。例如,只有一些ALADIN和COSMO联盟国家在其模式环境中考虑了阵风经验参数模型。
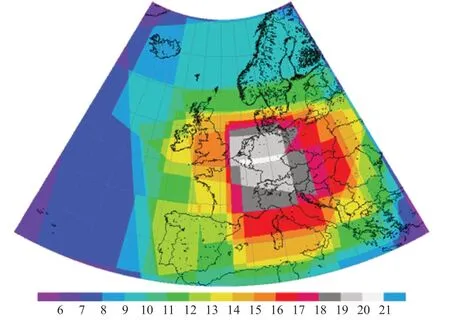
图2 SRNWP-PEPS格点的最大集合成员个数随空间的分布 Fig. 2 The spatial distribution of the maximum ensemble size of the SRNWP-PEPS
SRNWP-PEPS的缺点在于其概率预报估计存在偏差,可能是因为每个联盟内部的预报成员聚类,以及仍然存在一些不确定性源还未考虑,但经过集合后处理生成SRNWP-PEPS订正后的概率预报,可以作为欧洲其他集合系统的参考。另外,不能忽略提供集合预报成员的有限区域模式运行状态,否则“穷人”集合预报系统可能不完整。
2.2 SRNWP-EPS 短期数值天气预报集合预报系统
SRNWP-EPS是在EUMETNET框架下的一个项目,由于该项目任务的复杂与艰巨性,它主要分为两个阶段。第一个阶段是从2013年1月至2014年6月,该阶段由西班牙气象厅Estrada领导,其核心目的是实现2 km左右网格尺度的恶劣与高影响天气短期集合预报开发与应用在欧洲范围内最大限度地协作。主要完成任务:尽可能确定目前所拥有的项目相关状况和经验;计划使用SRNWP-I和SRNWP-V项目成果,以实现集合预报产品的互操作性和验证;为后面设计对流可允许尺度的集合预报系统筹划科学和技术实验;考虑最合适的初始扰动生成方法及其集合离散度、模型误差和大尺度边界不确定性以及可用的嵌套技术;满足所有相关合作伙伴要求,提供一个适用于不同气象中心的系统,使得高影响天气预报得到显著改善;分析和评估针对甚高分辨率集合预报的有限区域模式集合预报的科学方法发展现状,包括技术限制与弱点;可用和将来的计算机资源场景;为主要最终用户考虑必要的产品;为欧洲气象服务网咨询委员会提交一份SRNWP-EPS第二阶段提案。项目第二阶段从2015年7月—2017年12月,但最后延至2018年12月结束。该阶段由西班牙和意大利协调,其主要目的是帮助在欧洲建立甚高分辨率的集合预报系统,解决对流允许尺度的天气现象预报。主要完成任务:开发经订正后的集合预报新产品和新方法,用于雷暴、雾的极端预报和概率预报;针对极端事件(风、降水、温度等要素)进行集合订正;理解集合预报系统对土壤条件和边界层方案的敏感性及其对选定现象(雾和雷暴)预报的影响。从项目执行看,项目第二阶段主要聚焦高影响天气预报对象雷暴与雾,研究主要聚焦不同欧洲模式系统对土壤模型和边界层方案的描述不确定性,参与方目前主要有德国、匈牙利、意大利、挪威、波兰、西班牙、英国等21个欧洲气象服务网成员国。预计该项目将作为数值天气预报协作框架下SRNWP-EPS模块进行第三阶段工作,即从2023年1月1日—12月31日。
2.3 欧洲范围内主要有限区域业务集合预报系统发展概况
由于局地天气存在很大不确定性,因此欧洲很多国家都研发了有限区域集合预报系统,下面将对主要的代表性区域集合预报简要讨论,各高分辨区域集合业务系统的业务配置如表2所示,系统参数统计截止到2018年11月。
英国气象局:2005年,首次引入了一个短期区域集合预报系统,以改善对可能影响英国的高影响天气预报水平[26]。该系统被命名为英国气象局全球和区域集合预报系统MOGREPS (Met Office Global and Regional Ensemble Prediction System),它主要用于帮助预报风暴的快速发展、风、雨、雪和雾等天气现象。它包括一个覆盖北大西洋和欧洲的区域集合预报系统(称为MOGREPS-R)和一个为其提供侧边界条件的全球集合预报系统,称为MOGREPS-G。2012年7月,英国气象局推出了一个对流允许集合预报系统,其网格间距为2.2 km,嵌套在18 km网格的MOGRES-R系统中,预报长度为36 h,由一个控制预报和11个扰动成员组成,称为MOGRES-UK。2012年,它被首先用于为伦敦奥运会提供概率预报[27]。2013年1月,MOGREPS-G系统水平分辨率从60 km升级到33 km,这使得英国MOGRES-UK对流允许集合预报系统能够直接嵌套在MOGREPS-G全球集合预报系统中,而不需要中间的区域集合预报系统MOGRES-R[28]。截至2018年11月,该系统水平格距为2.2 km,垂直层达到70层,逐小时预报,预报长度54 h,集合成员24个。2019年3月,英国气象局对其业务运行的对流尺度集合预报系统 MOGREPS-UK进行了升级,它将每6 h进行一次预报,更新为每1 h进行一次预报,预报长度增加到120 h。
德国:基于二十面体非静力模式ICON(Icosahedral Nonhydrostatic),在ICON-EPS全球集合预报系统 (40 km)与ICON-EU-EPS区域集合预报系统(20 km)双向嵌套基础上,于2012年5月实施了一个2.8 km的对流允许尺度集合预报系统COSMO-DE-EPS,它嵌套在区域集合预报系统内,初始条件扰动来自区域集合预报的LETKF系统,由20个成员组成,每天运行8次,持续到21 h[29]。截至2018年11月,水平分辨率升级到2.2 km,预报长度增加到27 h。
法国气象局:基于2.5 km AROME模式,开发了一个对流允许尺度集合预报系统,称为PEARO(Prévision d’Ensemble AROME)系统,它嵌套在ARPEGE-EPS中,即法国全球短期集合预报系统PEARP(Prévision d’Ensemble ARPEGE)。PEARO系统2016年已经完成试验运行,并且自2016年10月中旬以来,每天业务运行两次,共有12个集合成员,其初始扰动来自于Arome-EDA系统。截至2018年11月,每天业务运行4次,其中在03时/15时起报的任务预报长度45 h,在09时/21时起报的任务预报长度为51 h。
奥地利:2007年3月,在ALADIN国际合作和中欧有限区域建模区域合作RC LACE(Regional Cooperation for Limited-Area modelling in Central Europe)框架内开发了中欧有限区域集合预报系统ALADIN-LAEF(Aire Limit´ee Adaptation Dynamique D’eveloppement InterNational-Limited-Area Ensemble Forecasting),并正式投入准业务运行。它的主要特征是通过ECMWF全球集合预报动力降尺度。2009年,ALADIN-LAEF系统升级多种处理预报不确定性的方法,以提高预报质量[30]。其初始扰动是通过混合方法[31]将ECMWF奇异向量产生的大尺度扰动与用ALADIN模式培育产生的小尺度扰动相结合得到,水平分辨率为18 km,垂直方向37层,预报长度54 h,由18个成员构成。截至2018年11月,水平分辨率升至11 km,垂直方向45层,预报长度延长至72 h。
当前甚高分辨率集合预报的研究和开发正在欧洲许多国家进行,已经成为集合预报研究的前沿与热点。作者认为,它应该成为除全球中期集合预报研究外的另一个焦点。欧洲其余国家的现状不再详述,其相关参数见表2所示。
总体而言,与欧洲全球集合预报相比,有限区域高分辨率集合预报有如下特点:1)集合预报系统的水平分辨率较高,除挪威(12 km)、奥地利(11 km)、匈牙利(8 km)和意大利(7 km)之外,其余国家均达到了5 km以下,大部分集中在2~3 km。2)有限区域高分辨率集合预报成员个数一般比全球中期集合预报的成员个数少。3)边界更新时间间隔均低于6 h,大部分达到逐3 h或逐1 h更新边界条件。4)集合预报的时间长度均比全球中期集合预报长度小,一般不超过72 h。5)初始扰动生成方面,挪威采用集合资料同化扰动加ECMWF全球集合预报的初始奇异向量扰动相结合,西班牙采用多个全球模式降尺度,奥地利采用奇异向量与区域模式增长模培育矢量相混合并结合陆面过程集合分析,匈牙利采用PEARP全球集合预报系统的奇异向量,英国采用高分辨率分析值叠加降尺度扰动,瑞士和意大利采用LETKF算法生成初始扰动,德国采用区域集合预报LETKF系统扰动得到初值,波兰通过时间滞后的确定性预报扰动土壤参数得到。不难发现,在高分辨率集合预报理论方面,初始扰动存在与全球中期集合预报初值理论切割的倾向,但目前还没出现一种公认的专门适合对流可分辨尺度集合预报的初值集合预报理论,因此各个国家在结合自身业务实际的基础上,集合预报理论与形式多种多样。
3 仍存在问题、挑战及未来方向
集合预报是欧洲业务预报的主流。当前它不仅广泛用于气象部门,还应用于水文学领域、能源部门和航空部门[32-33]等。截至目前,欧洲不但致力于全球集合预报的理论与应用不断向下迭代,其有限区域模式高分辨集合预报的研究与实践也在近十几年取得了丰硕的成果。本文从业务配置的角度简要探讨了欧洲业务集合预报的发展,旨在为集合预报理论探索和业务实践提供参考与借鉴。
总体而言,对于欧洲全球业务集合预报的发展,存在下面三个趋势[34]:
1)欧洲全球集合预报逐步走向地球系统建模与同化。例如,全球集合预报系统在升级过程中考虑了与海洋模式和海冰模式耦合以及耦合资料同化,集合预报效果得到显著改进。这些升级表明,通过增加相关的地球系统相互作用过程,可以进一步提高现有预报的质量,还可以进一步延伸动力预报的预报技巧天数。
2)ECMWF致力于在制作分析值、中期集合预报、次季节尺度集合预报和季节尺度集合预报业务的设计与配置升级过程中走向无缝连接。这种趋势一方面因科学发展推动,另一方面因为技术要求推动。从科学角度看,有证据表明与延伸期预报相关的过程也与短期预报相关。例如,在ECMWF集合预报中加入了海洋动力模式,使用海洋—陆地—大气耦合模型来计算季节和月时间尺度,发现它有助于提高集合预报的可靠性和准确性,ECMWF自然也将它引入到中期集合预报中。从技术角度来看,从第0天到第1年,在分析和预报阶段使用相同模式的开展集合预报,便于维护和业务升级。
3)全球业务集合预报向更高分辨率方向移动。这个问题源于需要更好解决较小尺度的天气预报问题以及相邻尺度之间的相互作用,其前提是增加计算资源。2016年ECMWF通过十年战略设定了许多宏伟目标,其中包括到2025年引入一个全球5 km的集合预报。并且ECMWF最终将丢弃高分辨确定性预报,而只专注于达到1 km左右的高分辨集合预报[34],目前法国气象局也采用了这一战略。
上述关于欧洲全球集合预报发展的三个方面尽管路线清晰,但目前的发展水平仅仅才是开始,还存在许多尚未解决的科学与工程技术问题,需要大气科学及相关交叉学科厚重的基础研究支撑。
对于有限区域甚高分辨率集合预报,目前欧洲各个国家所建设的高分辨率集合预报业务相比ECMWF中期集合预报均有相当的优势,但理论方面仍未形成有效突破,部分做法仍未完全摆脱中期集合预报的理论框架。当前SRNWP-EPS项目第二阶段任务业已完成,主要解决土壤模型和边界层方案的不确定性,预计将开展第三阶段工作,主要目标可能致力于对流允许或对流可分辨尺度集合预报的理论突破与业务应用,值得密切关注。
需要说明的是,本文并不是一个关于欧洲业务集合预报进展及应用研究的完全性综述。许多十分重要的方面,如欧洲各个国家甚高分辨或对流允许/可分辨尺度集合预报沿革和集合预报水平、季节内和季节尺度集合预报进展,以及它们与ECMWF全球集合预报对比等均未有涉及。我们相信,集合预报未来将绽放更多的光彩。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
上海师范大学学报·自然科学版(2022年3期)2022-07-11
现代电力(2022年2期)2022-05-23
山东建筑大学学报(2021年6期)2021-12-23
北京航空航天大学学报(2021年7期)2021-08-13
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
太空探索(2016年5期)2016-07-12
CHIP新电脑(2016年3期)2016-03-10
时代英语·高三(2014年5期)2014-08-26
微型计算机(2009年4期)2009-12-23
 Advances in Meteorological Science and Technology2020年2期
Advances in Meteorological Science and Technology2020年2期
- Advances in Meteorological Science and Technology的其它文章
- 低层垂直大气廓线遥感探测技术进展
- 研究型业务:来自2020年AMS百年年会的3个解读
- GRAPES全球/区域集合预报系统10年 发展回顾及展望
- 集合预报统计学后处理技术研究进展
- 集合敏感性分析在北半球中纬度高影响 天气中的应用
- 集合敏感性在预报误差及可预报性研究中的 应用进展综述