超声波焊接中机械手探析
2020-06-03 02:21张先伟
科学技术创新 2020年5期
张先伟
(北京爱普横川仪表有限公司,北京100000)
合理使用机械手,不仅对于我国的工业发展有着十分重要的意义,而且对于环境的保护也起着十分重要的作用。利用机械手,对于周边的环境可以做出快速的反应,并且根据实际情况,做出最为科学合理的判断;除此之外,在较为复杂的环境之下,使用机械手也可以有效的避免由于环境的复杂性出现的问题,提高工业的处理效率,保障工业质量。所以当前各国在进行发展的过程中,机械手越来越受到相关部门的重视,学习先进国家的经验,推动我国机械手的发展,实现工业自动化的发展。
1 机械手未来的发展意义以及趋势
1.1 机械手发展的意义
随着经济的快速发展,国内以及国外的市场竞争日益激烈,企业走向自动化是必然趋势。而机械手正是工业自动化的发展,会为企业带来较大的经济利益,可以减轻工人的劳动负担,从复杂有害的环境中释放出来。(1)可以提高企业的经济效益,提高企业竞争力;(2)提高技术的创新,推动我国企业的发展;(3)提高企业的生产效率,减轻人工的负担。
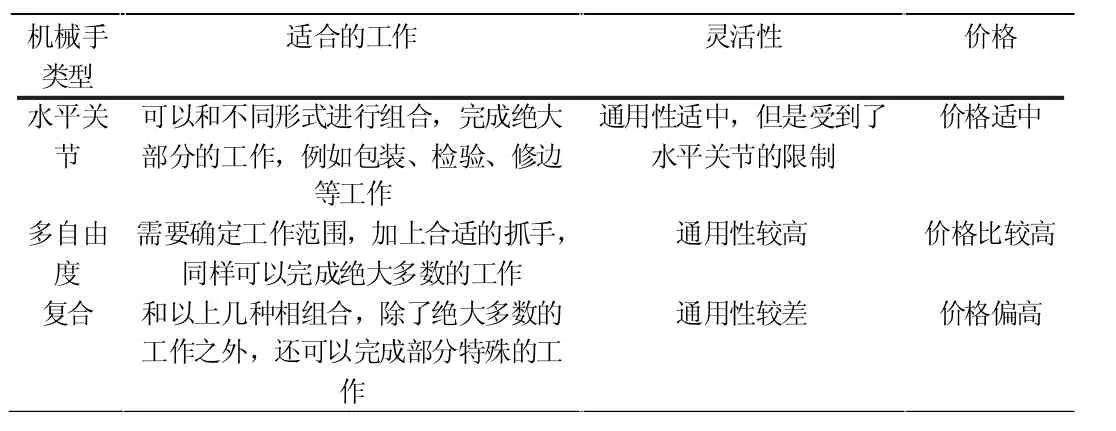
表1 当前机械手类别
1.2 机械手未来的发展趋势
1.2.1 高级智能化,应用广泛化
随着经济技术的发展,机械手向着智能化发展,机械手会不断学习相应的专业知识,并且在面对故障问题的时候,可以选择最优化的解决措施,并且能够有更强的适应能力,作出科学化的反应。另外在之后的发展过程中,机械手不再只是限制于工业生产的过程中,而是向社会的各个领域之中进行服务[1]。机械手会在人类的生活以及工作中,广泛的应用,并且发挥出更加重要的作用。

图1 几种常见的回转手臂结构
1.2.2 产品微型化,高精度、可靠性较高
当前机械手在不断的发展过程中,逐步实现微型化发展,能够代替人类进入到无法触及的领域,并且帮助人类进行相应的微观研究。而在科学的发展过程中,实现纳米机械手已经不再是遥远的梦想。除此之外,由于在进行机械手的发展过程中,人们对于机械手的要求不断提高,不仅需要有高精度,还需要有高可靠性,来保障机械手在使用的过程中,可以得到更好的发展,确保居民生活以及工作上的需求。
2 机械手主要部件的运动
机械手在进行一个完整的周期时,最主要的过程主要为以下四部分。第一,步进电机会带动凸轮间歇分割器,将机械手的手臂进行90°的旋转,气缸在收缩的时候,三个吸盘会同时进行动作,将成品的灯、灯盖以及灯座进行抓取。第二,气缸伸长之后,步进电机会带动凸轮间歇分割器,将手臂旋转90°,之后气缸收缩,这时吸盘会进行复位,灯会在传送带上,而灯盖则在下模具上。第三,气缸再次深长,不仅电动机带动凸轮间歇分割器转动,手臂会旋转90°后,气缸进行收缩,机械手臂上的吸盘复位,灯座会在下模具上,并且会和灯盖进行配合[3]。第四,气缸出现第三次伸长,步进电动机带动凸轮间歇分割器转动,手臂再次呈90°旋转,超声波焊接机上面的上模具会向下进行运动,并且和下模具相贴合。在超声波的高频振动之下,产生局部的高温,并且加之上下模具的压力,灯盖会和灯座的接触面出现迅速的融化,并且会将其融合在一起。而在上模具运动恢复到初始的情况下,机械手便会再次进入到下一个的运动周期之中。
3 臂部设计
在进行臂部设计的时候,需要注意以下的几点要求。第一,要有较大的刚度。只有将手臂的截面形状进行合理地选择,才能保障臂部在运动中出现较大的变形情况。由于工字形的截面刚度比较大,所以在进行设计的时候,主要是以工字钢作为支撑板。第二,需要较高的导向性。在进行臂部设计的时候,要做好导向设置,才能避免出现直线运动,设计方形等形状的臂杆。第三,重量较轻的臂部。在进行设计的时候,需要尽可能的较小臂部进行运动的重量,来提高工业机器人在进行运动时的运动速度。第四,除了上述的三点之外,还需要有高稳定性以及高精准度。而当前最经常使用的臂部结构有以下几种。第一,直线手臂机构:在当前设计的过程中,主要有活塞气缸,丝杠螺母机构或者连杆机构等等。而其中活塞气缸具备体积较小,并且较轻的重量等优势,所以在设计中比较常用。第二,回转手臂机构:当前常用的回转机构有以下几种:叶片式、齿轮式、活塞式、链条式以及连杆式几种,见图1(几种常见的回转手臂结构)。
4 手爪结构设计
在工业上,经常会选择进行抓取工作的手爪有真空吸盘、电磁铁以及气动手指等设备。而在超声波焊接过程之中,由于需要进行抓取的工件主要为圆形的塑料片状灯盖、灯座以及成品灯,其表面为光滑的情况,并且重量比较轻,因此使用电磁铁或者气动手指无法较好满足超声波焊接的要求,所以会将机械手的手爪为真空吸盘。真空吸盘是目前唱啊进的一种气动执行的原件,最主要的制作材料为丁腈橡胶,而真空吸盘进行工作的具体原理如下。在真空吸盘上会有一个通气孔。将气管和真空发生器相连接时,吸盘工作表面会和需要提升到物料所相接触。而真空发生器在工作时,真空吸盘的内部气压会出现急剧下降的情况,使其比大气压更低,从而可以将需要提升到物料进行牢牢的吸住,之后搬运到所指定的位置之处。在物件到指定位置的时候,真空发生器会有所动作,将气体通入真空吸盘之中,而吸盘内部的气压会有所增高,在比大气压稍大的时候,吸盘便会和物件想脱离,物件被放置到所指定的位置上,完成当前的工作任务。
5 结论
现阶段我国工业发展的过程中,绝大多数的企业仍旧是以人工或者半机械进行处理,但是由于其存在着劳动强度较大,并且其产生的垃圾以及噪音也十分大,安全系数较低等问题,导致在进行招工的情况下,出现了招工难的情况发生,从而导致我国工业的发展受到了阻碍,使行业在智能化以及安全性的发展滞缓。这使得我国机械手在工业发展的作用便逐步提高,从而导致企业需要加强对于如何进行机械手的设计,完善其自身的优势,这对于实现我国工业的发展有着十分重要的作用。
猜你喜欢
中国设备工程(2022年15期)2022-08-19
机电工程技术(2021年3期)2021-09-10
意林·少年版(2020年23期)2020-01-15
电子制作(2019年13期)2020-01-14
广东第二课堂·小学(2019年11期)2019-12-02
环球时报(2019-07-18)2019-07-18
汽车维护与修理(2019年1期)2019-07-09
模具制造(2019年4期)2019-06-24
三联生活周刊(2016年20期)2016-05-16
科技创新导报(2016年9期)2016-05-14