基于残差决策的自动飞行控制系统远程实时故障诊断
2020-06-07 07:07孙淑光
计算机应用 2020年5期
孙淑光,周 琪
(中国民航大学电子信息与自动化学院,天津300300)
(∗通信作者电子邮箱sgsun@cauc.edu.cn)
0 引言
高品质的飞行控制系统是现代民机安全飞行和完成复杂飞行任务的重要保证,它可以稳定操纵飞机、改善飞行性能、增强飞行安全、减轻驾驶员工作负担,是现代飞机不可缺少的重要系统[1]。为实现上述目标,飞行控制系统大多采用多余度容错控制系统,并具备各种增稳、配平功能,这就使得飞控系统信号关系复杂、交联设备众多,出现故障时定位困难、排故时间长,严重影响飞机的运行效率。对于民航飞机来说,飞控系统的故障通常都是发生在空中飞行期间,等到飞机飞回地面对飞控系统进行排故时,由于运行环境与条件的改变,基本无法复现飞控系统故障发生时飞机的各种状态参数,这对于信号铰链复杂的飞控系统来说,排故难度大幅增加。因此,迫切需要一种技术手段,通过远程实时采集飞控系统故障期间的各种数据,实现其远程实时故障诊断。这样不仅可以在紧急情况下为飞行员提供操纵指导建议,而且可以大大缩短地面维修维护时间、提高维护效率、降低飞机延误率,对确保航班按时运行、缩短地面停运时间具有重大意义[2]。
早期基于数学模型的飞控系统故障诊断方法[3-10]如今依旧是研究的热点。文献[9]提出了运用自适应观测器实现四旋翼控制系统的传感器故障诊断,效果良好。针对现代故障检测的实时性和精确性要求,利用小波分析方法、信息融合技术检测突变信号,灵敏度高,克服噪声能力强[11-14],文献[15]中利用小波神经网络对某型飞机飞控系统作动器的故障进行诊断,效果良好。在具备大量数据及经验的基础上,利用数据挖掘、神经网络、自适应算法、专家系统等手段进行故障检测与隔离,克服了基于模型的方法对模型的过分依赖,但需要具备大量数据及经验[16-23]。
上述研究大多是在飞控系统内部进行,无法实现远程实时故障诊断,本文借助机载飞机通信寻址报告系统(Aircraft Communication Addressing&Reporting System,ACARS)数据,利用检测滤波器,实现自动飞行控制系统的远程实时残差决策故障诊断。
1 自动飞行控制系统故障分析
飞行自动控制系统根据飞行员输入的指令或飞行管理计算机给定的目标指令信号,计算飞机的目标航向、姿态,再根据飞机气动参数,计算舵面偏转指令并发送给执行机构(舵机)去控制飞机相应的舵面,从而达到控制飞机姿态、轨迹的目的。任何一部分的故障都会影响或削弱飞控系统的控制效能,其中:舵面控制部分的负载是舵面的惯性以及作用在舵面上的气动力矩(铰链力矩);舵机输出一般为力(或力矩)和线位移(或角位移);伺服控制器件利用舵机的速度和位移等达到闭环控制的目的。
根据飞行控制系统的整体架构,系统的故障包括传感器故障、飞行控制计算机故障、伺服作动系统故障以及控显装置故障等几大部分,其中飞控计算机故障及控显装置故障通常由计算机的内部自测设备(Built In Test Equipment,BITE)功能来完成,效果良好,因此,这部分的故障诊断不在本文研究之列。舵面控制部分主要包含了各种传感器、机械装置、电动装置等,出现故障的概率大,检测困难,是飞行控制系统故障诊断的难点和重点。
1.1 自动飞行控制系统故障分析
飞控系统传感器常见的故障有卡死、增益变化、恒偏差三种情况,假设yiin为第i个传感器正常时的输出,yiout为第i个传感器故障时的输出,则相关的故障发生时,传感器的输出表达式如下。

传感器故障会造成被控对象动态方程的改变。对于自动飞行控制系统而言,传感器发生故障时,其动态方程可用式(4)表示:

其中:x(t)∈ Rn为状态向量;u(t)∈ Rp为控制向量(或系统的输入向量);y(t)∈Rm为观测向量(或传感器的输出向量);A∈ Rn×n,B∈ Rn×p,C∈ Rm×n为相应的控制回路对应的矩阵。Q∈Rm×g为传感器故障的分配矩阵;f s(t)∈Rg为传感器故障对系统输出的影响函数。
1.2 ACARS数据采集及传输
机载ACARS是一个基于甚高频通信系统或卫星通信系统的在飞机和地面之间进行双向数据传输的系统,为航空公司和空管部门提供大量有用信息,实现航空公司的运行控制和维修保障、空中交通管制和机场地面运行监控等。
ACARS可以在无需机组人员干预的情况下自动地向地面航空公司应用系统提供飞行动态实时数据,确保公司掌握本公司飞机的动态,实现对飞机的实时监控、满足航务安排、运营管理、机务维护等部门的工作需要[2,24]。航空公司可以在ACARS机载设备端加载客户化程序,通过设定触发条件,在机载飞控系统出现故障情况时,触发ACARS的数据采集与传输功能,使机载ACARS数据采集组件按照要求的频度采集飞控系统的控制指令数据(驾驶杆输入、姿态指令等)与输出数据(飞机姿态响应、姿态角速率等),并通过甚高频通信系统或卫星通信系统将这些数据实时发送给地面,地面系统通过故障诊断软件,实现对飞控系统的远程实时状态监控及故障诊断。如图1所示。
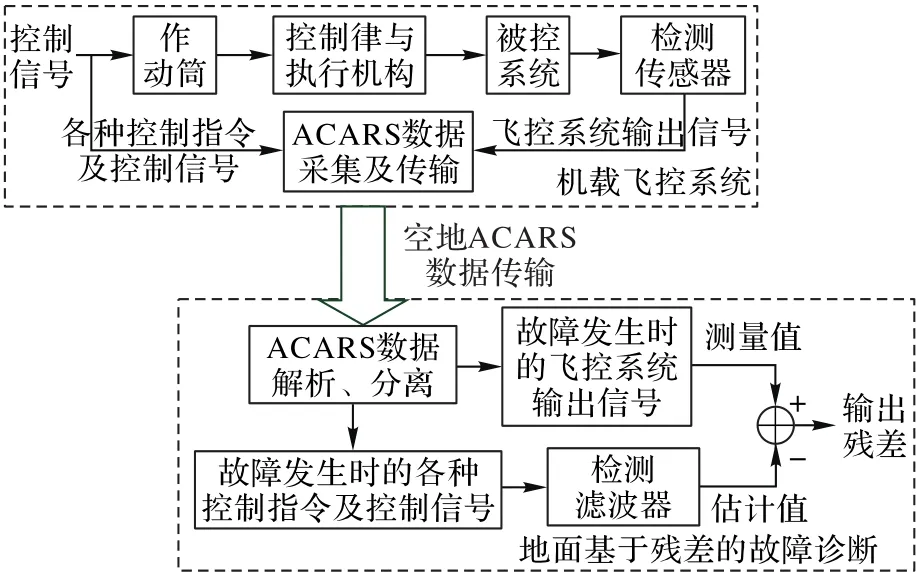
图1 飞控系统远程实时故障诊断系统架构Fig.1 System architecture of remote real-time fault diagnosis of flight control system
利用ACARS空地数据链远程实时传输相关数据的飞控系统故障诊断方案可以有效地获取飞控系统故障时的各种实时数据,通过地面ACARS数据处理端,将数据进行解析、分离,获取故障当时的飞控系统控制指令输入数据和系统输出数据(传感器检测到),地面故障诊断软件利用这些数据,借助有效的故障检测算法,实现系统的远程实时故障诊断。
2 基于残差输出的故障诊断决策算法
2.1 检测滤波器的设计及残差生成
基于检测滤波器的故障检测方法通过使检测滤波器输出信号在某种指标下等价于原系统的状态来完成系统的状态估计,利用检测滤波器的输出和系统真实输出之间的残差确定故障,这种方法尤其适用于控制系统的故障检测。
本文将机载ACARS发送的飞机飞行控制系统的输入指令及传感器检测的飞机姿态响应参数发送给检测滤波器。传感器输出与检测滤波器系统动态模型输出的差值信号经设计好的增益矩阵K反馈到模型输入。正常工作条件下,只要滤波器稳定,其任何初始误差都会逐渐消除,最终准确跟踪系统的输出响应,在不考虑噪声、干扰或系统未建模部分的影响的情况下,输出误差将保持为零。如果系统中某一部件发生故障,则输出误差将不为零。通过设计故障检测滤波器,使其输出误差具有方向性,某个部件的故障对应一定方向的输出误差。这样就可以方便地进行故障检测和隔离。
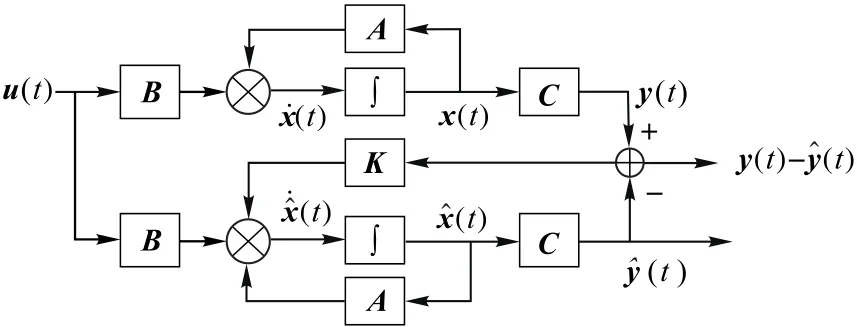
图2 飞控系统检测滤波器基本结构Fig.2 Basic structureof flight control system detection filter
故障检测滤波器具有如下的线性观测表示形式:

其中:x̂(t)是状态估计向量,ŷ(t)是输出估计向量,K是检测滤波器的增益矩阵。可得传感器故障模型的解为:
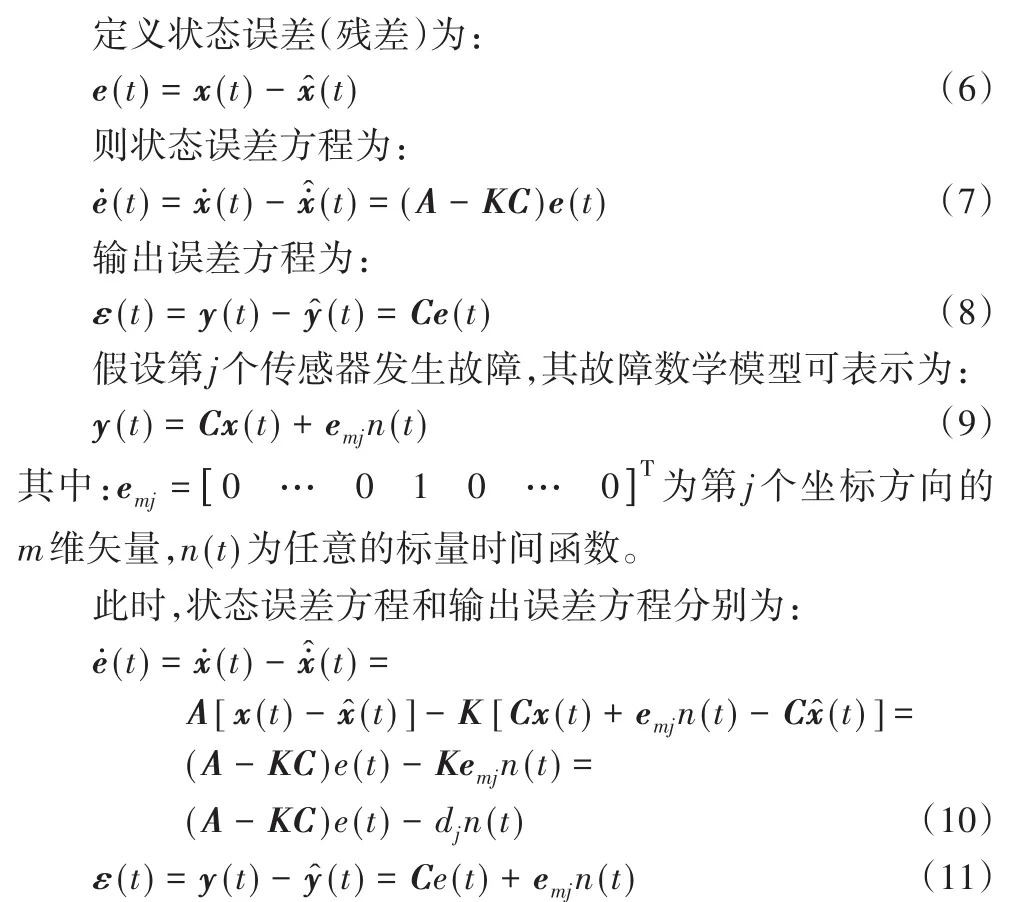
其中:第一项为瞬态解,第二项为稳态解。若系统稳定,则其稳态状态误差和稳态输出误差分别为:

由此可见,传感器故障的稳态输出误差方向处在由(C dj,e mj)所构成的二维平面上,仅和故障信息有关,和扰动及模型不确定性没有关系。
上述故障情况下的状态误差方程,可以采用故障矢量f来描述。

故障的可检测性由滤波器的增益矩阵K来保证。系统中与fi相关联的故障可检测的充分条件是,存在滤波器增益矩阵K,使得:
1)Ce s(t)在输出方向保持固定方向;
2)(A-KC)的所有特征值能够任意配置。
若f是可检测的,则可以通过检测输出误差的方向来判断发生故障的部件。
由于残差中既包括了可能的故障信息,也混有系统内部噪声信号,且检测滤波器、数学模型与实际系统之间也存在不可避免的偏差,因此需对利用残差决策算法进行故障检测和故障来源判断,以获得一定置信度的故障诊断结果。
2.2 故障诊断的残差决策算法
常规的残差决策算法主要有门限判决法、移动窗口平均法以及概率比假设检验法三种方法。门限判决法简单、快速,但是对随机波动没有鲁棒性;移动窗口平均法对原始序列具有平滑效果,但门限值的确定需要通过大量实验统计数据获取,且故障类型差异及严重程度的不同会导致输出残差变化剧烈,难以确定一个适合所有故障情况的门限值。因此,本文采用基于二次差值的残差决策改进算法。
2.2.1 二元假设检验及其判决准则
将待检测信号x(t)表示为未知信号si(t)与噪声等干扰信号n(t)的线性叠加:
x(t)=si(t)+n(t) (14)其中:si(t)可以是不含故障信息的信号s0(t),也可能是含有故障信息的信号s1(t)。H0表示不含故障信息的信号s0(t)的存在,H1表示含故障信息的信号s1(t)的存在,则二元假设检验根据一定规则选择其中之一。
其中:p=P(H1)和q=P(H0)分别为故障信息的信号s1(t)和不含故障信息的信号s0(t)的先验概率;p(x|H0)、p(x|H1)分别为H0和H1的条件概率密度。
通常情况下,输出残差的采样数据XN=(x1,x2,…,xn)满足相互独立的要求。采样数据的n维条件概率似然比定义如下:

其中l(xn)是第n次采样数据的似然比。设置上下双门限lh、ll取代单门限,当前k(k≤N)次采样的似然比L(Xk)超过门限lh时,接受H1假设;小于门限ll时,接受H0假设,如果处于两者之间,则继续采样,直到满足要求。其中上门限为lh≤(1-β)α,下门限为ll≤β(1-α),α为故障检测的虚警率,β为漏警率。
2.2.2 基于二次差值的残差决策算法
由于飞控系统是在系统故障瞬时触发ACARS相关数据的采集及传输,因此,易出现瞬态故障(如电压出现瞬时波动)导致的虚警;且由于通信环境的限制,ACARS故障信息发送的间隔时间通常会高于信号的采样时间,导致用于远程故障诊断的数据量少于实际系统运行的数据量。因此,为降低虚警率和计算量,考虑残差序列总体趋势变化,采用二次差值连续检测法,把残差向量划分为连续的多个子残差向量,以相邻子残差向量的差值作为残差决策算法的检测对象,从而减缓检测对象的整体变化趋势,有利于门限值的有效选择。本方法可以降低短时间内的随机噪声和干扰的影响,一定程度上避免将瞬态故障定位为系统故障的情况。
设某观测时间内,系统检测滤波器得到变量u的输出残差的m个采样点,残差向量a=(a1a2…ai…a2n),每个子残差向量的长度为n,用于检测的连续子残差向量个数为N。决策算法步骤如下:

3)检测二次差值序列(Δ1,Δ2,…,ΔN)中的每一个值是否均超门lh或ll,是则判定在Δi中的采样点ai对应的采样时间发生故障,否则,将二次差值序列右移一位继续检测,直至检测完最后一个二次差值点。
残差检测流程如图3所示。
图3 基于二次差值的残差决策算法流程Fig.3 Flowchart of residual decision-makingalgorithmbased on quadratic difference
3 故障诊断仿真与分析
3.1 检测滤波器设计
以某型飞机飞控系统为例,通过仿真实验对飞控系统的传感器进行故障检测和诊断。飞机运动方程为:


图4 系统输入信号Fig.4 System input signals
正常情况下系统的各输出量如图5所示。
图5 正常情况下系统的输出曲线Fig.5 Systemoutput curvesunder normal condition
可以看出:对于同一输入激励,系统各输出的变化范围有较大的差别,所受影响各不相同。加入检测滤波器,进行残差计算。无故障情况下,各传感器的输出残差曲线如图6所示。

图6 传感器正常情况的输出残差曲线Fig.6 Residual output curves with sensors under normal condition
可以看出,输出残差除了在输入值跳变点上有较小的波动外,其余时间点的残差基本维持在0附近,说明设计的滤波器能够很好地跟随系统的实际情况。其中除了侧滑角的输出残差在[-0.2,0.2](侧滑角的正常输出在[-2,10],比滚转角速率和偏航角的正常输出范围大得多,分别是10倍和2倍),滚转角速率、偏航角和倾斜角的输出残差分别基本保持在[-0.05,0.05]、[-0.02,0.02]和[-0.01,0.01]相对很小的范围。可见,相同的输入,不同传感器输出残差的波动程度不同,在一定程度上反映了传感器的敏感性,其中侧滑角的敏感性最大,倾斜角的敏感性最小。
3.2 常规残差决策算法

利用常规残差决策算法进行故障诊断仿真。对侧滑角v传感器在第8秒设置卡死故障。其中:viout(t)为故障发生前的输出,vfiout(t)为故障发生后的输出。传感器输出曲线及经检测滤波器输出的残差曲线分别如图7所示。
当侧滑角v传感器在第12秒发生恒增益变化故障(恒增益系数为2)时,相应的曲线如图8所示。

假设侧滑角v传感器在第12秒发生恒偏差失效故障(恒偏差系数为4),相应的侧滑角输出曲线和经检测滤波器后的残差曲线如图9所示。

滚转角和偏航角可以得出类似的仿真效果。可以看出,仿真中设计的检测滤波器对故障检测具有较高的灵敏性,能够及时准确地检测出传感器故障。同时也看到,由于闭环反馈控制的作用,系统的传感器之间存在一定的关联,单一传感器故障能引起整个系统输出的变化,当某一传感器出现故障时,所有传感器的输出均受到不同程度的影响,通常是发生故障的传感器的输出残差变化剧烈;输出残差曲线变化范围发现难以选择一个合适的门限值使三种故障均能够被正常检测。
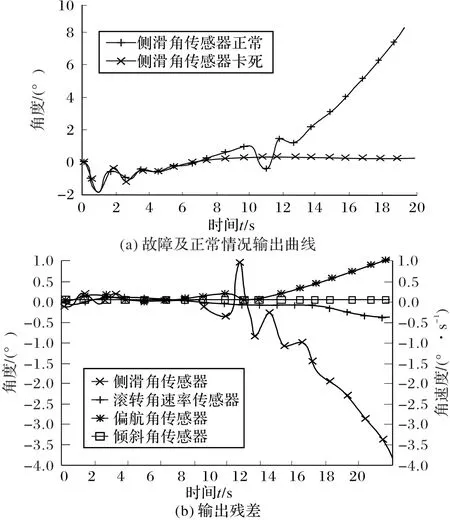
图7 侧滑角传感器卡死时的故障曲线及输出残差曲线Fig.7 Fault and residual output curveswith side slip angle sensor jamming
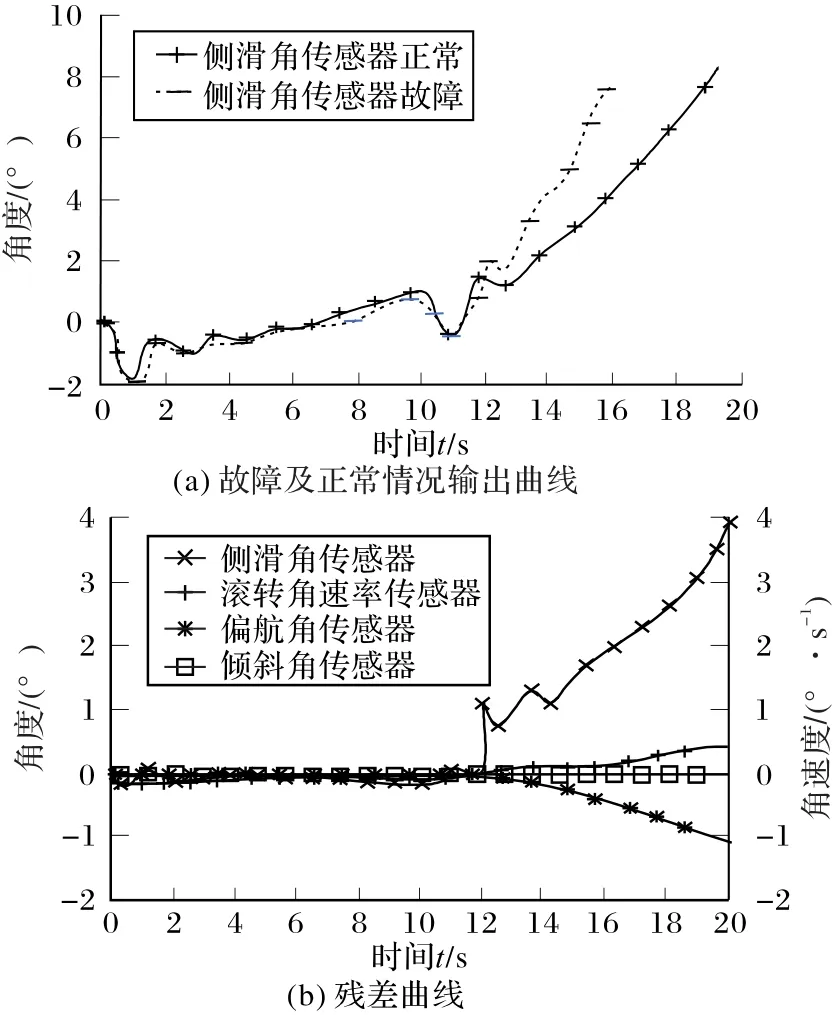
图8 侧滑角传感器恒增益时的故障曲线及残差曲线Fig.8 Fault and residual output curveswith sideslip angle sensor havingconstant gain
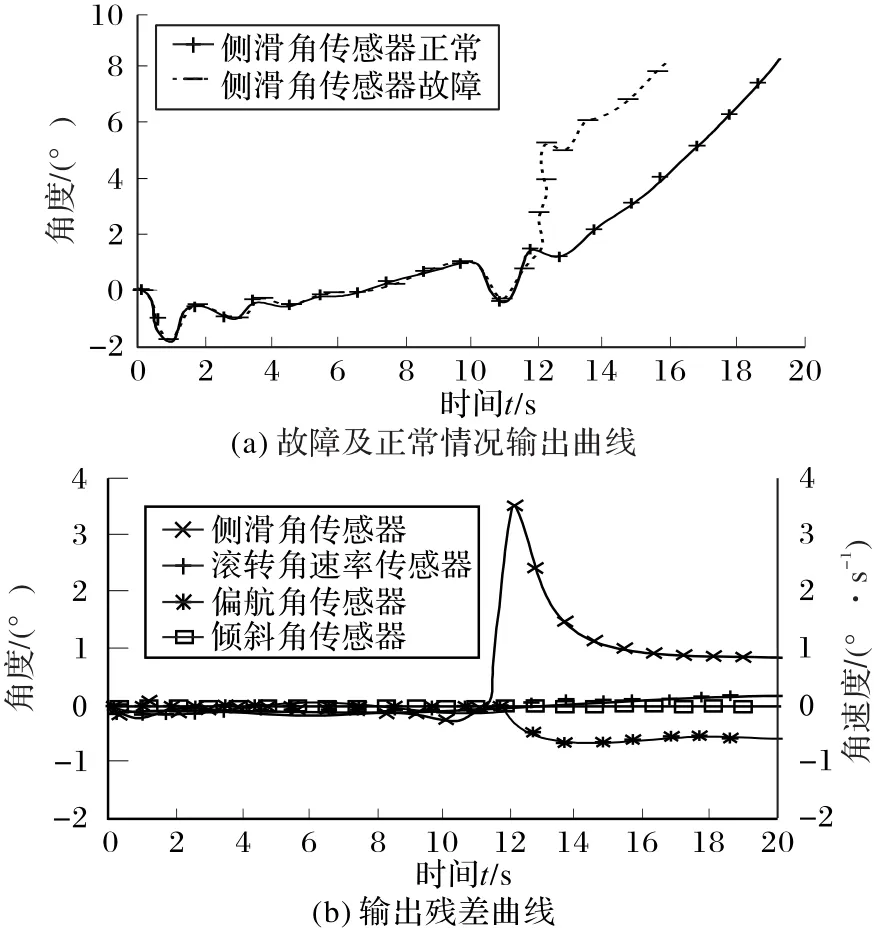
图9 侧滑角传感器恒偏差时的故障曲线及输出残差曲线Fig.9 Fault and residual output curveswith sideslip anglesensor havingconstant bias
3.3 基于二次差值的改进残差决策算法
实验仿真时间同样为20 s,采样间隔为0.1 s,lh为0.07,ll为-0.13,N=6,n=5,即共201个采样点,可分成40个残差子向量,每个残差子向量0.5 s,需要连续6个满足条件的残差子向量才能判断故障。依次比较各传感器的所有残差子向量中的每个值是否均超出相应的判断门限,是则标记为1,否则标记为0,并继续比较下一个残差子向量直至结束。各传感器的检测结果如下所示。
当侧滑角v传感器在第8秒发生卡死故障时,二次差值序列和相应的检测结果如图10所示。
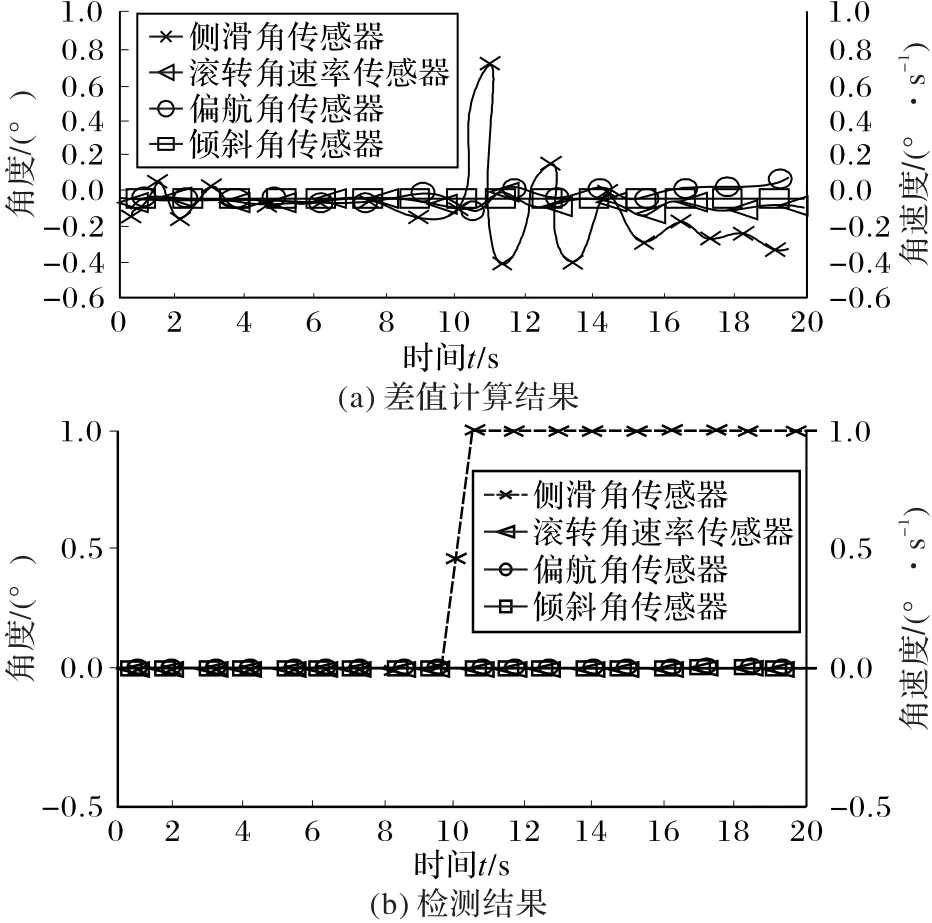
图10 侧滑角传感器卡死时的差值计算及检测结果Fig.10 Deviation calculation and detection results with sideslip anglesensor jamming
当侧滑角v传感器在第12秒发生恒增益故障时,二次差值序列和相应的检测结果如图11所示。
当侧滑角v传感器在第12秒发生恒偏差故障时,二次差值序列和相应的检测结果如图12所示。
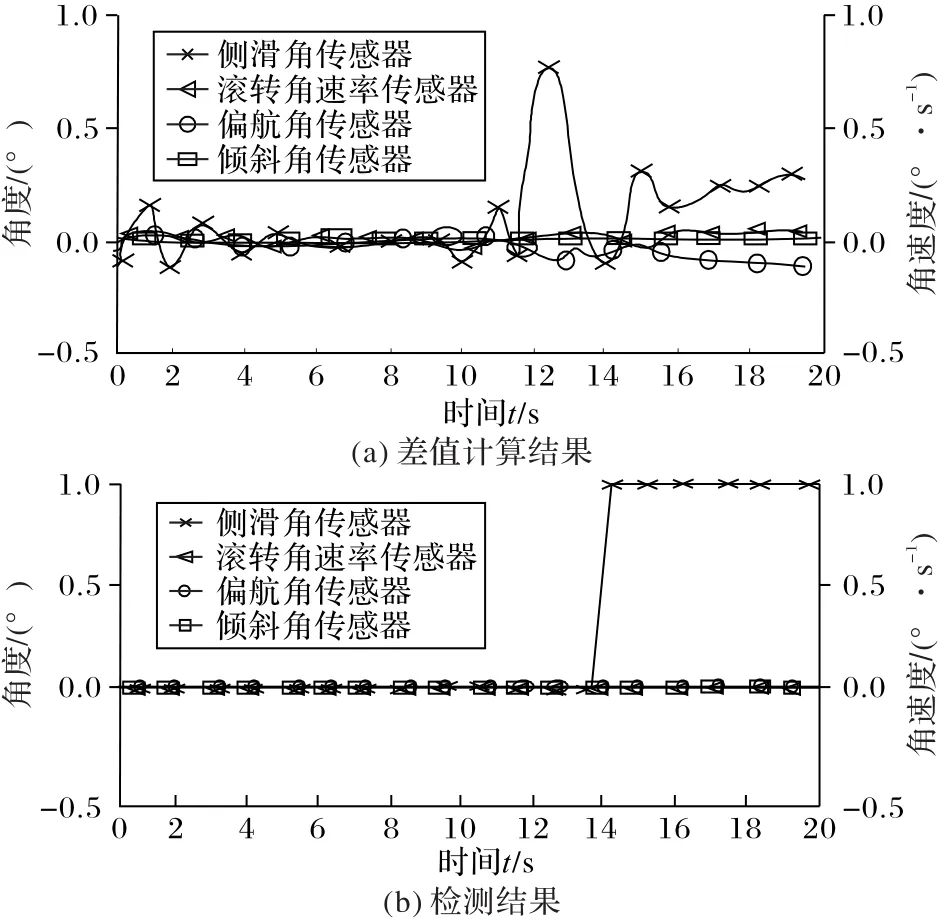
图11 侧滑角传感器恒增益时的差值计算及检测结果Fig.11 Deviation calculation and detection results with sideslip anglesensor havingconstant gain
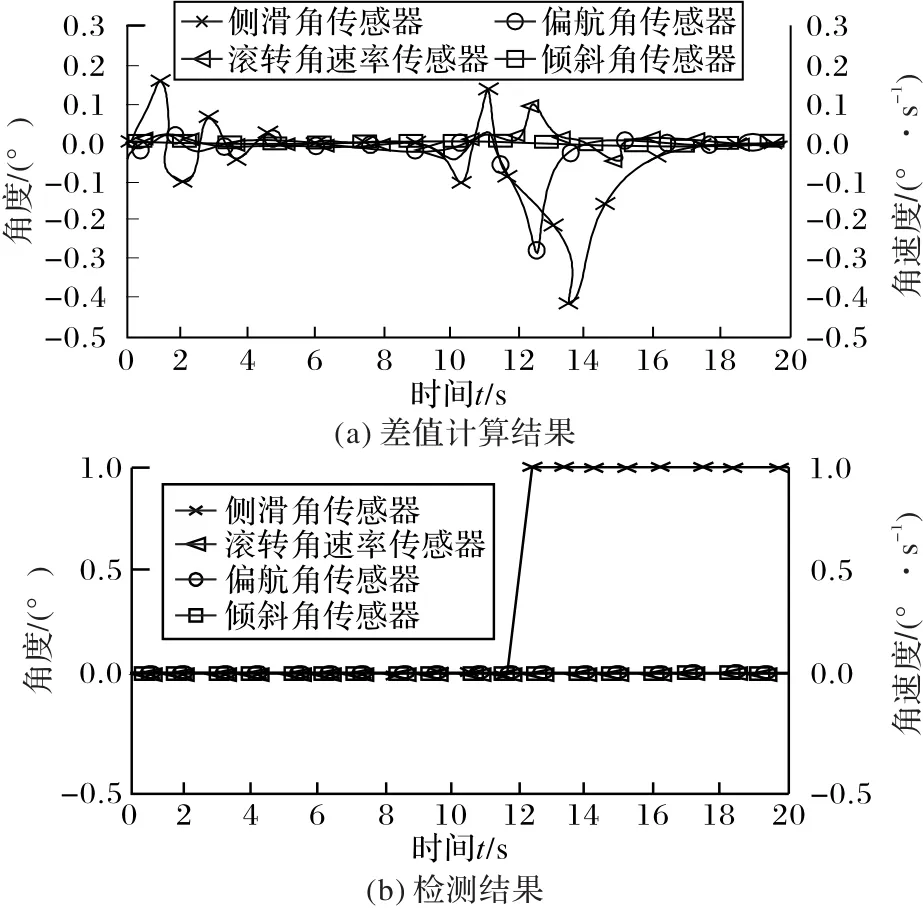
图12 侧滑角传感器恒偏差时的差值计算及检测结果Fig.12 Deviation calculation and detection results with sideslip angle sensor constant bias
从仿真结果中可以看出,采用基于二次差值的改进残差决策算法能够有效检测出发生故障的传感器,效果良好,但由于本算法要求二次差值序列中的N个连续值均超出门限时才判为故障,所以部分情况下检测出的故障发生时间与实际时间存在少许滞后偏差,但只要提高采样频率,就可以确保在给定的时间内检测出故障。另外,由于检测滤波器的输入及传感器数据来自ACARS的采样数据,如果ACARS数据的采样率偏低,就难以保障故障的及时检测,因此,需要对机载ACARS的采样频率进行限定,以确保系统故障检测的实时性。
4 结语
本文研究了飞行控制系统故障诊断的方法,利用设计的检测滤波器得到传感器的输出残差;根据仿真输出值和实际测量值得到输出残差,提出了基于二次差值的残差决策改进算法;最后通过仿真传感器和作动器的主要故障类型数据验证了算法的有效性。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
北京大学学报(自然科学版)(2022年1期)2022-02-21
昆明医科大学学报(2021年5期)2021-07-22
家庭影院技术(2021年3期)2021-05-21
航天工业管理(2020年9期)2020-12-28
北京航空航天大学学报(2020年10期)2020-11-14
软件(2020年3期)2020-04-20
科技传播(2019年22期)2020-01-14
北京航空航天大学学报(2019年9期)2019-10-26
高中时代(2017年7期)2018-02-24