轻小型无人机飞控测姿数据辅助测图精度性问题探讨
2020-06-10 09:37陶源
科学技术创新 2020年9期
陶源
(中国市政工程中南设计研究总院有限公司,湖北 武汉430014)
随着我国经济体制的不断发展与完善,现代土地资源管理工作的要求也在持续提高。其中,无人机测绘作为土地资源数据汇总的主要手段,若是在测图精度方面存有偏差,不但会影响土地资源管理与审核的准确性,使土地资源的可控性降低,同时也会影响后续地籍管理等工作的开展,使土地资源的利用率下降。因此,如何有效提升无人机飞控测姿数据测图精度,便需要得到技术部门与人员的重视。
1 姿态转换与测量精度的影响
站在轻小型无人机飞控测姿数据辅助测图精度偏差诱因角度来看,目前主要可分为以下四种:(1)原有传感器原件技术水准偏低,并且测算精度很难满足现代航测图纸提高精度的要求,普遍姿态精度都会低于±2.00°,由此便极易诱发测绘精度不足与偏差问题;(2)轻小型无人机采用了姿态传感器与摄影传感器刚性连接的措施,使得无人机航测过程中的数据会相互影响,最终使姿态与摄影传感器的轴向产生系统误差,而经过调查,此种偏差数值通常可以控制在0.50°以内;(3)受地域气候、设备技术与网络环境等因素影响,飞控系统在操作相机摄影的过程中,经常会存有曝光延迟的情况,这使得姿态数据与影像数据的传到产生微小偏差,技术人员很难核对并确定曝光延迟时间,因此便会造成不可控的精度差异;(4)通常飞控测姿数据需要结合ROll、Pitch、Yaw三者数据绘制摄影测量坐标系,过程中受外界元素影响,经常会使坐标系数据产生偏差,对此便需要经常对坐标系数据进行变换, 此时坐标系数据受无人机姿态的影响,通常会产生微小的偏差。对于此种情况,操作者通常会将坐标系原点定位在传感器的中心,并自动核实东方、北方与垂直向上的坐标轴,以便外方位元素与摄影测量坐标系关联,使二者偏差数值便于转换与识别。
而从无人机航空摄影测量角度来看,ω、φ、κ 三者也是较常见的精度数据。其中,ω 与φ 若是出现测量数据偏差,极易使平面与高程方向的测算数据精度受影响; 而κ 若是出现测量数据偏差,则会直接对平面数据的测量精度造成影响,三者影响特征各不相同,但都会使最终数据出现失真的问题。
2 影响飞控测姿数据精度的问题特征
姿态转换主要包括7 个过程:①ROll、Pitch、Yaw角转换为ωz、φz、κz;②将每个架次中的每条航线得到的ωz、φz、κz与“空三”数据ω、φ、κ 对应相减得到每条航线总误差V; ③求得每条航线总误差V的平均值即Vm;④将每条航线总误差V与Vm相减剔除地面坐标轴与安装形成的系统误差,得到电子元器件对姿态所形成的粗差Vv; ⑤求得每个架次中所有航线的3 个角度的中误差|Vs(φ)|、|Vs(ω)|、|Vs(κ)|,以此来反映姿态数据所形成的误差;⑥按照航向重叠度60%计算俯仰角对航向影响最大光线角度,对高度影响最大光线角度; 按照旁向重叠度40%计算侧滚角对旁向影响最大光线角度,对高度影响最大光线角;⑦利用航测数据高程平均值作为飞行行高H,结合最大光线角度及以上每个架次ω、φ、κ 姿态角所求的中误差Vs(φ)、Vs(ω)、Vs(κ)利用相关公式分别进行测图精度影响分析。
结合飞控测姿数据内容可知,在地理定向期间,所有无人家架次姿态呈现以下特征:(1) 无人机俯仰角误差最小为0.74°, 最大为5.60°, 平均误差值为3.256°;(2) 无人机侧滚角误差值最小为0.44°,最大为6.42°,平均误差值为3.469°;(3)无人机偏航角误差值最小为0.67°,最大为11.38°,平均误差值为5.12°。
通过姿态测量精度偏差推演公式可知,无人机的地面测图的精度数值与角度、光线、主光轴夹角有明显的关联性,随着无人机飞行高度的持续提升,这种测图精度的偏差还会逐渐增加。其中,无人机飞行高度与俯仰角测算偏差的关系为0.066H, 与地面高程测算的关系为0.266H;飞行高度与横滚角偏差的平面关系为0.078H,与地面高程测算的关系为0.161H; 无人机飞行高度与偏航角偏差的平面关系为0.099H。
另外,数码传感器的规格与姿态测量精度数值也有所关联。通常, 无人机选用传感器规格普遍为36X24mm, 像元4.9μm, 焦距28mm。此类传感器的航向重叠度普遍为60%,旁向重叠度为40%,此时若无外界环境因素影响,则地面分辨率可控制在0.1m,若无人机飞行高度达到570m范围,则定向俯仰角测量误差会达到39.41m左右,而高程误差则会达到146.22m;在横滚角测量误差方面,数值可达到50.94m,高程误差数值可达到89.12m;偏航角测量误差方面数值可达到60.60m,普遍误差值较高,难以为地面测图工作的开展提供有效帮助。
3 飞控测姿数据的改正对策
若要使无人机飞控测姿数据的精度满足地面测图工作要求,通常姿态信息可通过高精度POS设备采集并处理, 以便使测姿数据的质量得以保障。但从无人机操作与使用角度来看,高精度POS设备的重量、体积功耗均很难应用至无人机设备中,否则极易对轻小型无人机的升空高度与续航能力造成影响。因此,目前常通过外方位数据内容反向推算无人机的姿态数据,通过平差内容判断大致的计算结果,以便得出相对准确的姿态真值。但从目前数据处理与汇总条件来看,我国在无人机飞控测姿数据领域资料研究深度明显不足, 若要寻找一条专用于评估无人机姿态稳定的数据存有较高难度。
为谋求飞控测姿数据的科学性与准确性,本文基于以往飞控经验与数据统筹平台,对飞控系统内记录的姿态数据与影像内容进行了研究,由专业人员对姿态数据与外方位元素进行核对,以便判断轻小型无人机俯仰角、横滚角与偏航角的确切状况与误差分布。具体数据如表1 所示。
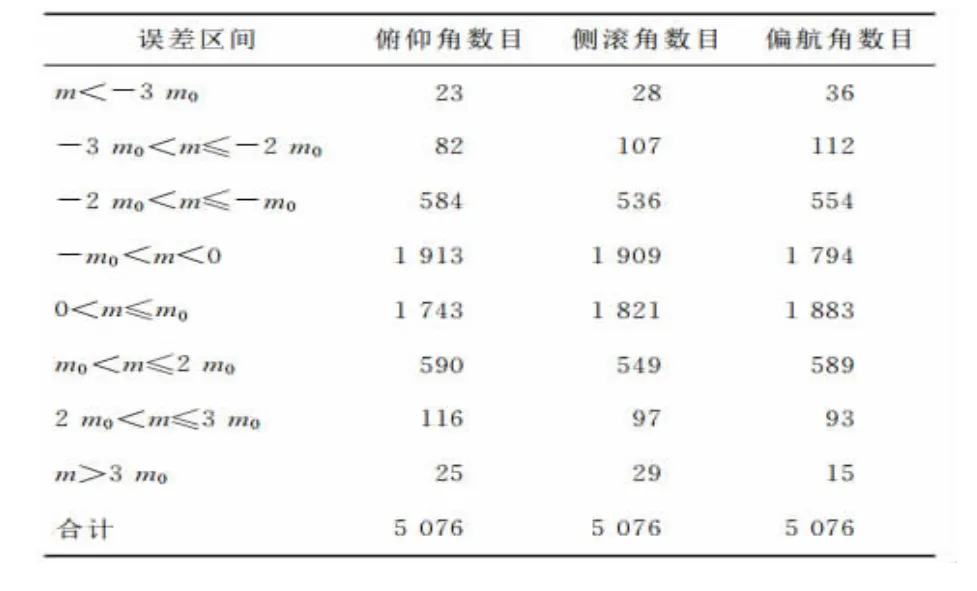
表1 姿态角观测值误差分布情况
其中,m代表着无人机各观测数值的偏差, 而m0为该区间内观测值的偏差。由表1 数据可知,轻小型无人机观测过程中,俯仰角、侧滚角与偏航角数目偏差多集中在单倍幅度内,并且俯仰角2 倍误差数值占总比例的4.94%,侧滚角占5.14%,偏航角占5.05%。基于偏差正态分布规律可知,偏差值P<0.05,其偏差数值可划分至小概率事件,而三种角度偏差都集中在临近0.05 的区间内,这便说明飞控测姿数据超出2 倍误差数值的概率较低,对整体地面测图精度的影响较小。因此,即便是轻小型无人机采用无集成座驾系统,在地面测图工作中的精度能够满足遥感作业的标准与精度要求。而若是能够将集成座驾系统应用于轻小型无人机设备内,同样能够有效将俯仰角、横滚角与偏航角的偏差值降低,使地面测绘数据的整体精度得到提升。
另外,在轻小型无人机操控期间,操作人员可借助“空三”数据对航行轨道的方位进行三角测量,以便得到确切的空间坐标,便于求证俯仰角、侧滚角与偏航角的偏差数值,而在同名点点位与数量不变的情况下,操作人员同样可借助POS 确定外方位元素,而后根据实际测算情况替换“空三”的元素内容。为确保测算精度得到提升,操作人员仍需基于数据对航行轨道方位进行三角测量,并确定各个同名点的空间坐标,计算数据的偏差值。可知,平面航向与高程偏差值范围远低于原有偏差,因此通POS 外方位元素转换对策,能够有效缩减轻小型无人机俯仰角、侧滚角与偏航角的偏差,使飞控测姿数据的精度得到优化。
4 结论
飞控测姿数据改正措施的有效落实,既能够通过飞控姿态数据的外方位元素与“空三”外方位元素的转换关系,缩减无人机俯仰角、横滚角与偏航角的偏差数值,使偏差精度控制在允许范围内,同时凭借POS 装置的应用,也能够优化测控数据的质量,使测控精度得到最基本的保障。故而,在论述如何缩减飞控测姿数据的精度偏差期间,必须明确坐标系与设备技术存在的问题,以便更有效的控制地理测图的精度数据。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
幼儿园(2021年12期)2021-11-06
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
诗选刊(2015年4期)2015-10-26