一种小型化的离轴旋转光通信系统设计
2020-06-17 06:45
广东通信技术 2020年5期
1 引言
当需要在两个相对旋转部件[1,2]之间实现高速通信时,旋转光通信[3]系统应运而生。对于某些特殊行业的应用,例如雷达[4,5]的旋转轴中心位置装有波导管,或者其他旋转部件的中心轴位置装有高压气体时,应用于轴心的光滑环[6]或者电滑环的使用便受到限制,就需要一种离轴旋转光通信系统。
上海理工大学的科研人员发明了一种离轴旋转光通信系统[7,8,9],该系统由准直器、分光路器、单模光纤、视频采集卡及PC等组成。它的外形尺寸相当于一个φ210 mm×300 mm的一个圆柱体,它适用于在某些大型化的旋转仪器设备中进行光通信。由于它采用了口径较大的光纤准直器对光纤发出的信号光进行准直,这样便可以使用尽量少的发射光路和接收光路,因此电路部分得到了大大的简化。文献[7]中所涉及的离轴旋转光通信系统,有4路发射光路和2路接收光路。
若缩小离轴旋转光通信系统的尺寸,系统准直镜的尺寸也必须相应的缩小。若仍想实现光信号的完全覆盖,必须增加发射光路和接收光路的数量,迫使后续的电路处理系统变得异常复杂,体积和功耗等会变得非常大。而在某些特殊应用场景下,如雷达系统的小尺寸离轴旋转通信系统,文献[7]的设备和设计思路就无法满足工程应用需求。因此,本文在文献[7]的基础上,基于光滑环思路,立足可工程应用的原则,设计了一种小型化的离轴旋转光通信系统,不仅能满足微尺寸特殊场景应用,还具备较高的通信速率。
2 系统结构及工作原理
本文所设计的离轴旋转光通信系统,它包含两个相同的旋转端,每个旋转端以电路板为主要支撑结构。电路板中心为其他结构预留安装空间,电路板上布置发射信号光的LED和接收信号的光电探测器。使用LED代替光纤激光器,主要因为光纤器件的安装精度要求较高[10,11,12]。四路LED作为发射信号光的光源,以宽视方式[13]发射信号光,并且四路LED均匀分布于电路板内孔附近,光电探测器也位于电路板内孔附近,若以四路LED所在的位置画一个圆,那么光电探测器也位于这个圆上,以此保证光电探测器能够接收到更多的光信号。系统结构与工作原理如图1所示。
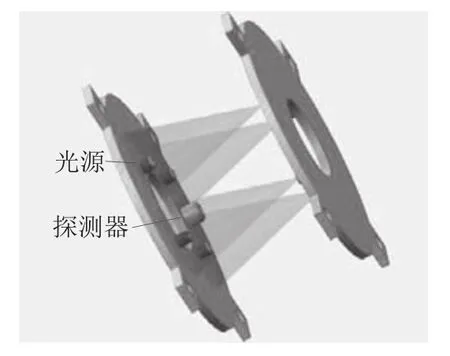
图1 离轴式旋转光通信系统的工作原理
选用发射角度较大的LED作为信号光源,并且选用探测面积较大的光电探测器接收光信号,探测器输出的电信号与接收到的光强成正比[14]。四路光信号发射LED可以覆盖整个圆域范围,以保证某一端在旋转过程中,光电探测器始终能够接收到LED所发射出来的信号光[15]。信号光覆盖区域示意图如图2所示,其灰色部分代表电路板,用于处理数字信号,蓝色区域代表对面端的LED发射出的信号光能覆盖的区域,黄色代表本端的光电探测器,黑色代表的是本端的LED光源,中间的空白区域是为其他结构预留的安装空间。
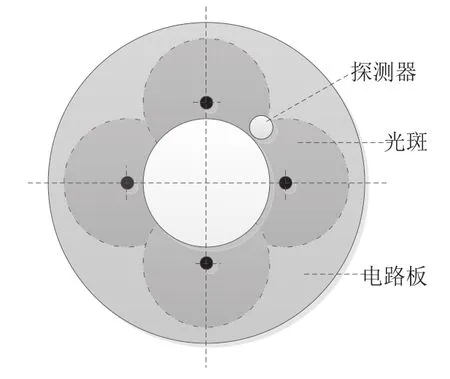
图2 信号光覆盖区域示意
为了实现此光学系统既定的功能目标和紧凑的几何尺寸,项目团队从以下三个方面开展设计和论证工作。其一,采用了发射角较大的LED发射光信号,选用了探测面积较大、灵敏度较高的光电探测器;其二,通过Zemax软件进行精确仿真,确定了各个光电器件合理的布局位置;其三,通过微电路、多功能模块化设计,减少电路板上器件数量,减少功耗,在有限空间实现更多的功能。
此光学系统所采用的主要光电器件和各项技术指标参数如表1所示。
3 实验测试及结果分析
根据大多数实际应用的需求,使内孔直径为20 mm。同时,在保证旋转光通信系统的各项基本功能实现的基础上,逐步压缩系统外径设计尺寸,最终将外径尺寸控制在60 mm以内。与文献[7]的系统相比,外直径缩小70%,内直径缩小33%,系统小型化设计非常明显。
图3为离轴旋转光通信系统的正视图,它的内径和外径的尺寸都已标记在图中。
图4为旋转光通信系统的侧视图。可以测出实际电路板左侧器件的最高点,与电路板右侧器件的最高点之间的距离为10 mm。

表1 光学系统器件的各项指标

图3 离轴旋转光通信系统的正视
图4 旋转光通信系统的侧视
图5为旋转光通信系统测试的俯视图。将离轴旋转光通信系统通过结构件固定,安装调整之后,测试两个旋转端相距10 mm时,每旋转15°后,测试接收端的光电探测器所能接收到的功率。由于某一旋转端被4个相同的LED光源均匀分成四个相等的区域,所以,测试区域只要包含1/4象限即可[16]。由于每旋转15°测试一个数据,要完成一个象限90°的测试,共需测量7组数据。
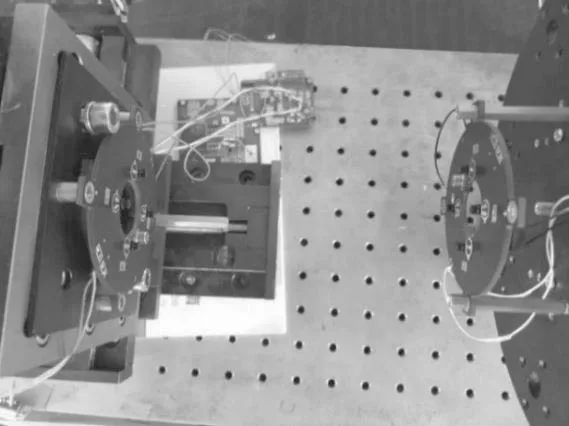
图5 旋转光通信系统的测试实验
通过调整不同的距离,在两个旋转端之间相距10 mm和200 mm时,每隔若干距离测试一次,接收端的接收功率如表2所示。
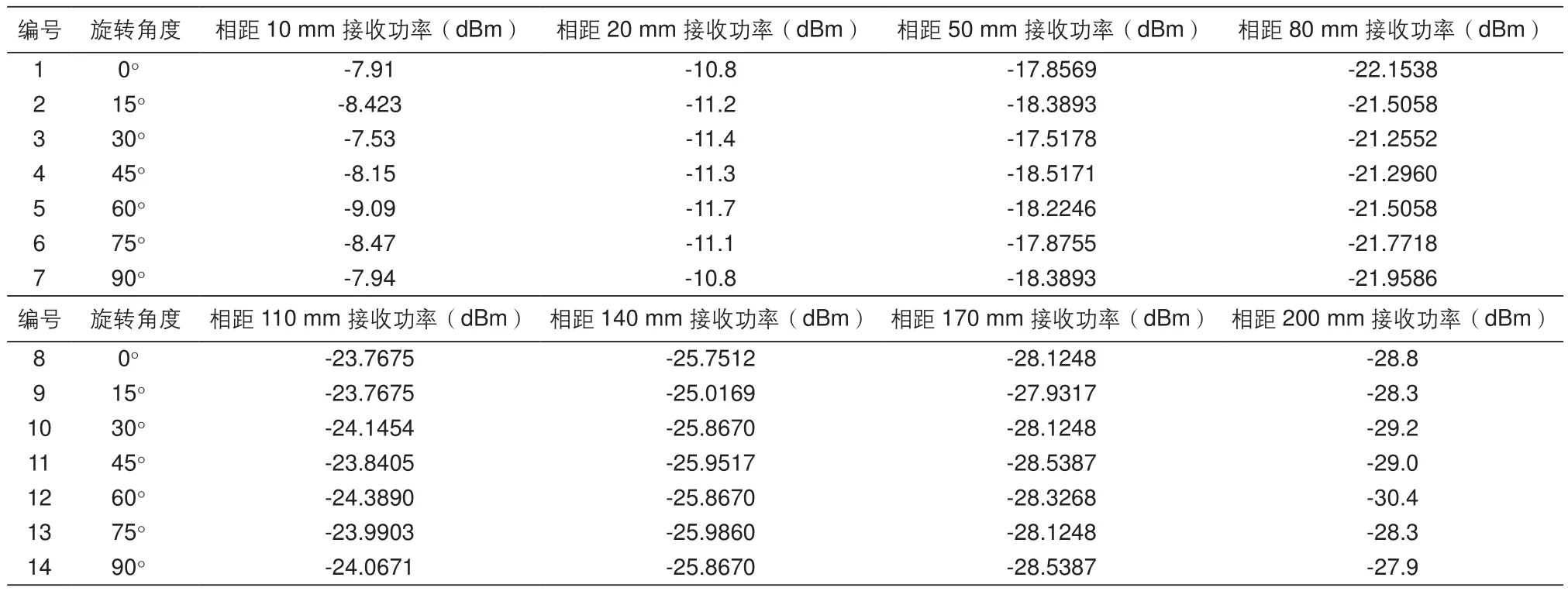
表2 接收端的接收功率表
当转速在60 r/min的情况下,通信距离在10 mm到200 mm之间的某一位置时,接收端接收到的功率平均值如表3所示。

表3 接收端的平均功率表(转速在60 r/min)
当转速在120r/min的情况下,通信距离在10 mm到200 mm之间的某一位置时,接收端接收到的功率平均值如表4所示。

表4 接收端的平均功率表(转速在120 r/min)
光电探测器接收到的功率,均大于光电探测器的接收灵敏度,故在发射端与接收端之间,相距10 mm到200 mm的距离时,两旋转部件之间可以实现信号的传输。当某一旋转部件以60 r/min的转速转动时,另一旋转端的光电探测器所接收到的功率会有一定的变化。随着通信距离的增加,在旋转通信的过程中,光电探测器接收功率变化量会相应地减小。当转速在60 r/min的情况下,通信距离在10 mm到200 mm之间的某一位置时,光电探测器接收到的平均功率随距离变化的曲线图,如图6所示。
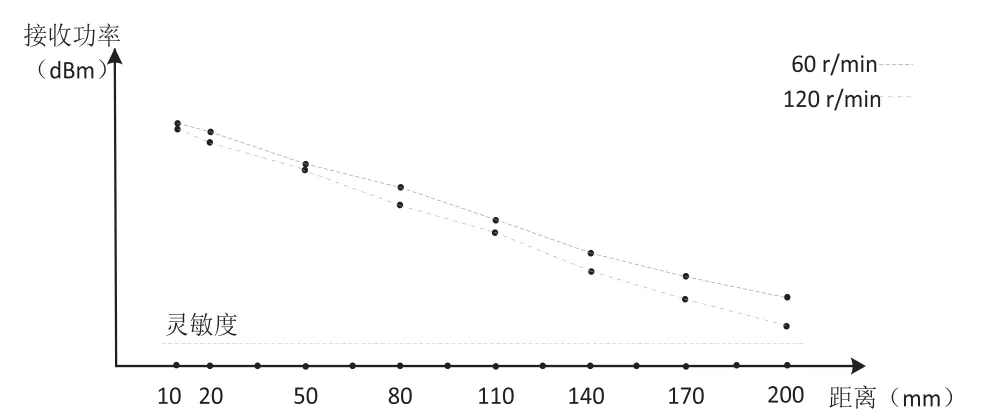
图6 光电探测器接收功率随距离变化的折线
由图中的折线图可知,随着两旋转部件之间的距离逐渐变大,光电探测器所能接收到的光信号强度也在逐渐减弱,但减弱程度逐渐变小,且接收到的能量都高于光电探测器的灵敏度,两旋转部件之间仍可建立信息链路。
4 结论
为满足现代精密光学仪器和雷达工程等对小型化光通信系统的需求,根据Zemax软件仿真,设计了一种小型化的离轴非接触式的旋转光通信系统,在实现高速通信功能的前提下,采用大发散角的LED光源设计,不仅能够使实现高速双工通信,而且兼具小型化工程应用特点。本文设计的小型化离轴旋转光通信系统,内直径为20 mm,外直径为60 mm,在垂直电路板方向上测量单端离轴旋转光通信系统的尺寸,其最高点与最低点之间的距离为10 mm,体积为25.132 cm3。系统在两旋转端之间的距离小于200 mm,转速小于120转/分钟的情况下,可实现100 Mbps的高速双向光通信。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
科学技术创新(2021年7期)2021-03-23
声学技术(2020年4期)2020-09-15
现代传输(2016年3期)2017-01-15
现代传输(2016年2期)2016-12-01
中国学术期刊文摘(2016年2期)2016-02-13
空间控制技术与应用(2015年4期)2015-06-05
中国卫生(2014年7期)2014-11-10
汽车与新动力(2012年5期)2012-03-25