无人船在清淤工程中的应用研究
2020-06-18 03:43
水利建设与管理 2020年5期
(广州市水电建设工程有限公司,广东 广州 510600)
1 工程概况
磁湖位于黄石市中心,磁湖径流面积62.8km2,湖泊面积8.2km2,平均水深1.75m,湖体容量1748万m3,是兼有防洪、排涝、养殖和游览等功能的水资源地。
亚行贷款黄石水污染综合治理项目生态修复子项目磁湖清淤第一期工程位于黄石市市中心。其中清淤工程范围为南磁湖湖首生态港渠和南磁湖南岸清淤,总清淤量为382319m3。
2 选择课题
磁湖是黄石市市区的一座城中湖,1997年被湖北省政府批准为省级风景区。磁湖底泥的淤积状况直接决定水生态修复的成败,因此磁湖清淤项目成为了水生态环境修复的重要环节。
通过对以往清淤项目进行调查(见图1),传统清淤验收方式,一般采用人工插标尺杆的方式进行验收检查。由于该方式人为因素干预大,导致以往清淤工程的误差大,因此超欠挖值往往都在0.4~1m之间,甚至更高。

图1 传统清淤超欠挖误差值统计
从图1可知,传统清淤误差大,导致清淤效果达不到治理和恢复水生态的效果。为了改变以往的测量弊端,减少传统清淤工程施工误差,公司特组建无人船QC小组,对磁湖的河床清淤进行准确测量。无人船在清淤工程中的应用课题产生原因流程见图2。
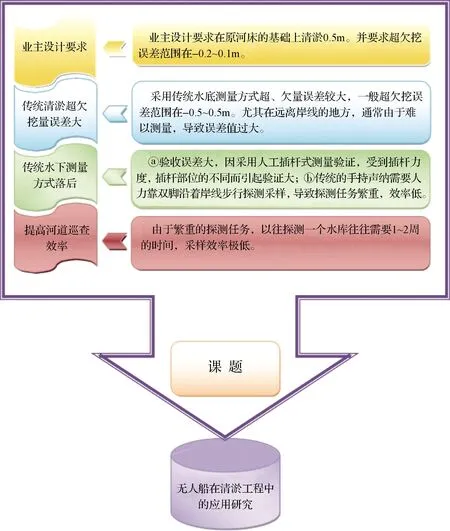
图2 课题选择
3 设定目标
QC小组在前期的调查中,发现传统清淤施工中,超欠挖量为-0.5~0.5m,而公司要求项目部在本工程中,减少传统测量误差,提高效率、降低复查成本。因此抽调“企业创新中心”的技术骨干,研究无人船水下测量技术。希望通过新技术的引进能将超欠挖误差控制在-0.18~0.08m。
4 方案比选
清淤测量探测项目主要由测量探测方式和测量探测载体两部分组成。QC小组通过同类项目的调查及网上查新,分别对测量探测设备和测量探测载体的选择进行了分析比较。
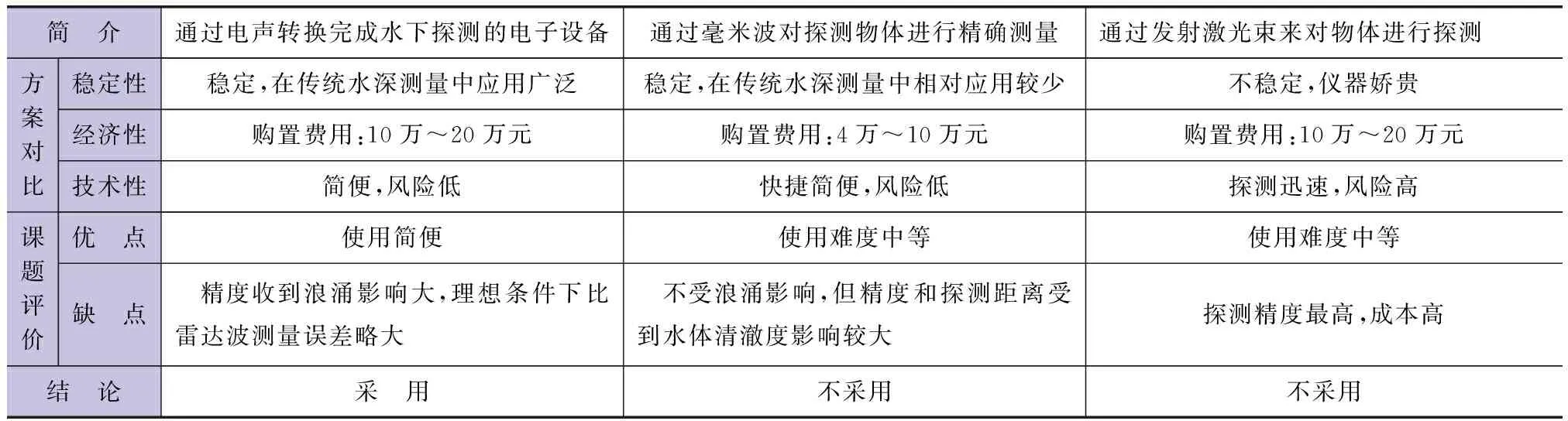
4.1 测量探测设备比选
测量探测设备比选见表1。
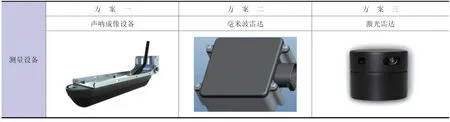
表1 测量探测设备比选
续表
小结:通过以上分析,测量探测设备优选方案为声呐成像设备。
4.2 测量探测载体比选
测量探测载体比选见表2。

表2 测量探测载体比选
小结:通过以上分析,测量探测载体优选方案为无人船。因此,最终清淤测量探测项目采用“无人船搭载声呐成像仪”方案。
5 制定对策
“无人船搭载声呐成像仪”方案由船体安装和调试、声呐成像仪连接和调试两部分任务组成,因此,QC小组针对这两项任务制定了对策表,见表3。

表3 任务对策实施计划
6 对策实施
6.1 无人船控制系统
无人船控制系统如图3所示,声呐情况如图4所示。
6.2 对策实施
6.2.1 船体安装和调试
对策:优选载体及完成制作安装。
措施如下。
6.2.1.1 船型的优选
船型的选择主要从船身、船体材料、尺寸三方面进行考虑(见图5)。通过对任务情况和厂商提供的船型尺寸进行分析(见表4),最终确定了采用GFRP材质的双体船作为本次任务的载荷设备。
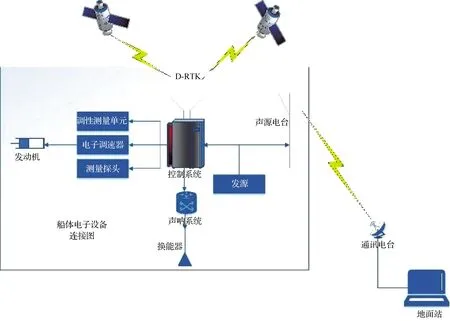
图3 无人船控制系统
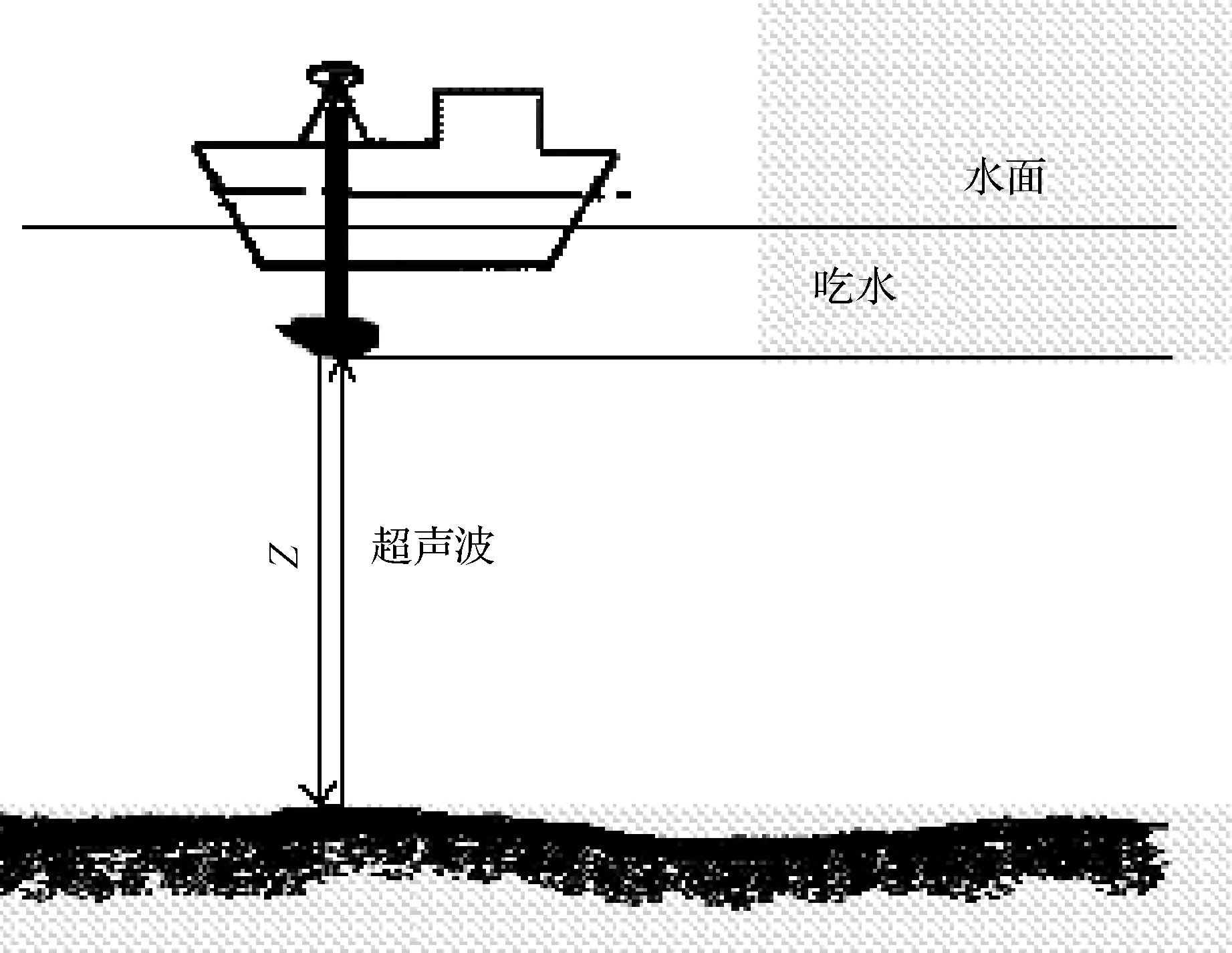
图4 声呐示意图

图5 船体类型示意图
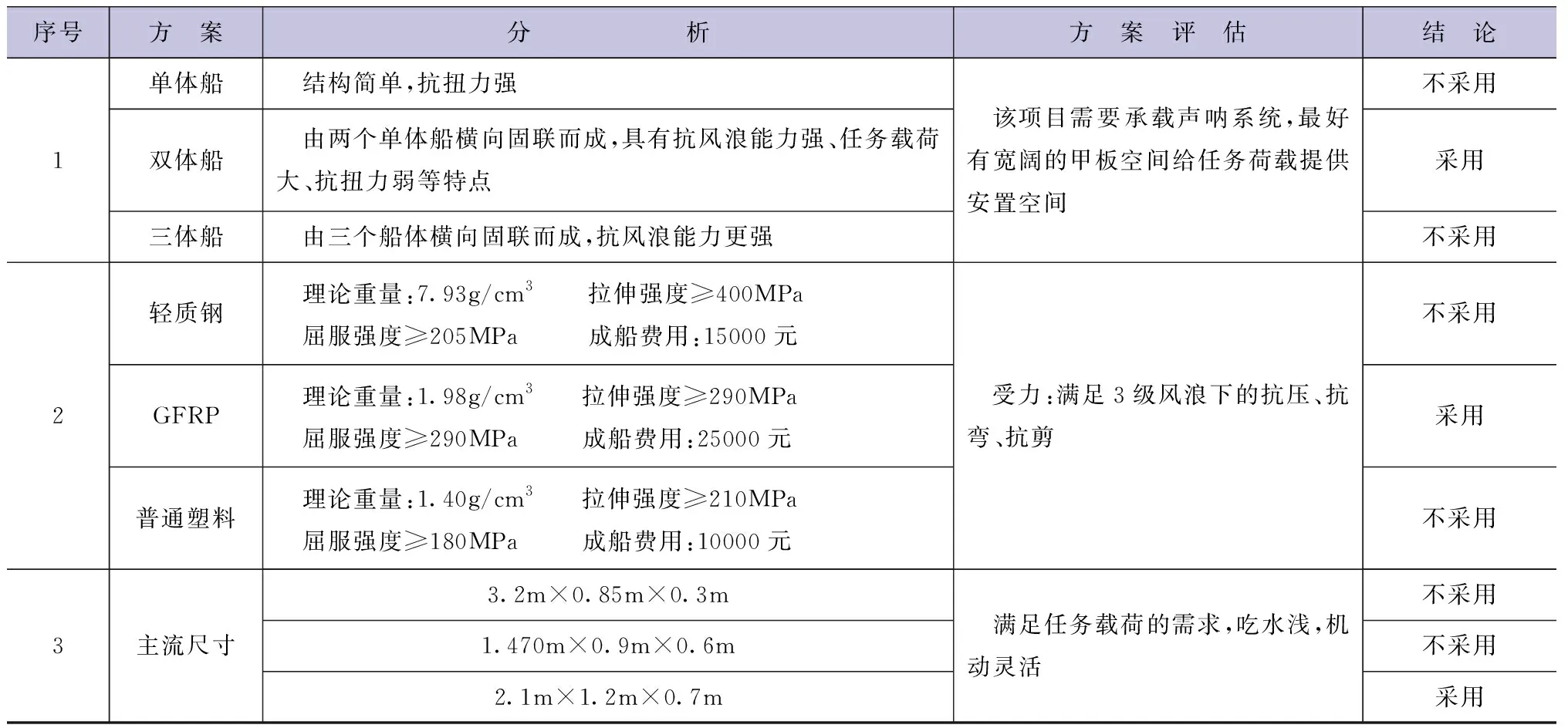
表4 船体分析及评估
总结:从理论参数、力学性能、经济性等方面对载体进行选择,最终选用尺寸为2.1m×1.2m×0.7m、GFRP材料的双体船为本次任务的载荷船体。
6.2.1.2 动力系统的优选
动力系统选择分为发动机选择和螺旋桨选择两个部分,小组成员对发动机和螺旋桨进行比选分析,最后确定电机和定距浆为本项目的动力选择。
动力系统如图6所示,动力系统分析及评估如表5所列。

图6 动力系统示意图
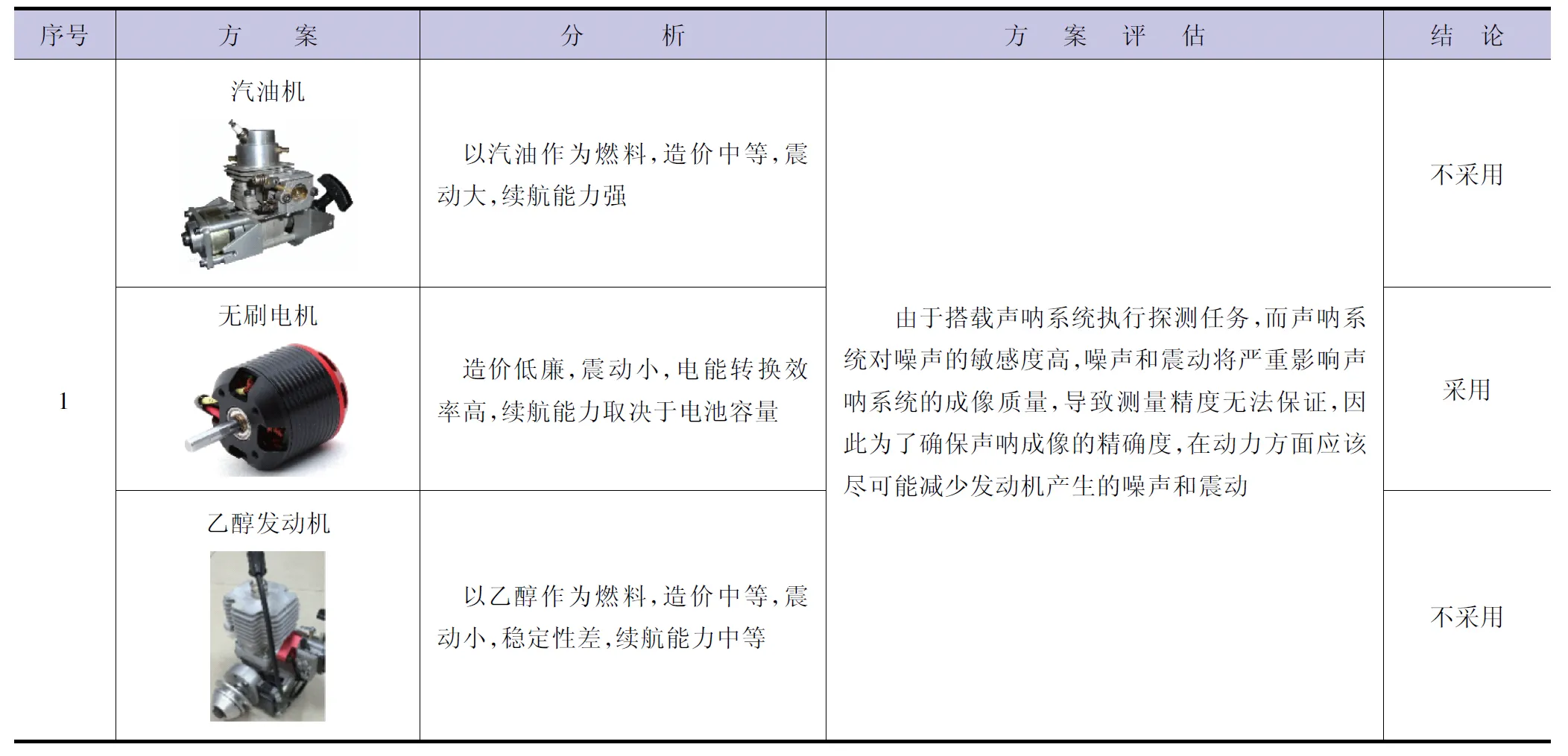
表5 动力系统分析及评估

续表
6.2.1.3 定位系统的优选
定位系统的优选见图7,定力系统精度及分析见表6。
小组成员通过定位原理与定位精度比较,结合项目要求,最终选定采用伪差分定位作为本项目的定位系统。
6.2.1.4 安装和调试
a.将D-RTK接收机天线与测深仪换能器尽量安装在同一测深杆上,测深杆位于船身重心上,以确保稳定。换能器吃水深和D-RTK天线高为固定值,便于量取水位线深和天线高,并可减小由负载、航速、航向变化以及水深测量误差。

图7 定位系统示意图

表6 定位系统精度及分析
b.对控制系统进行参数调整,校准电子磁罗盘。通过对磁罗盘的校准,船体能识别到自身相对地面的姿态。由于风浪影响而发生偏航情况时,船体能及时调整到正确的航线上。
c.小组成员携带设备在湖边进行航线规划测试,并观察船体偏航距离是否小于5m(见表7)。

表7 航迹过程
从航迹数据可知,无人船在执行任务过程中偏航距离一般小于5m,仅在航线转弯处受风浪影响会出现偏航过大的迹象。航迹吻合度达到93.3%,满足使用要求。
结论:小组通过测试验证,船体能按照预先规划的航线自主航行,航迹与预期航线吻合程度高达93.3%。达到预期效果。
6.2.2 声呐成像仪连接和调试
对策:实现声呐成像。
措施如下。
6.2.2.1 声呐选择
声呐系统优选分析见表8。
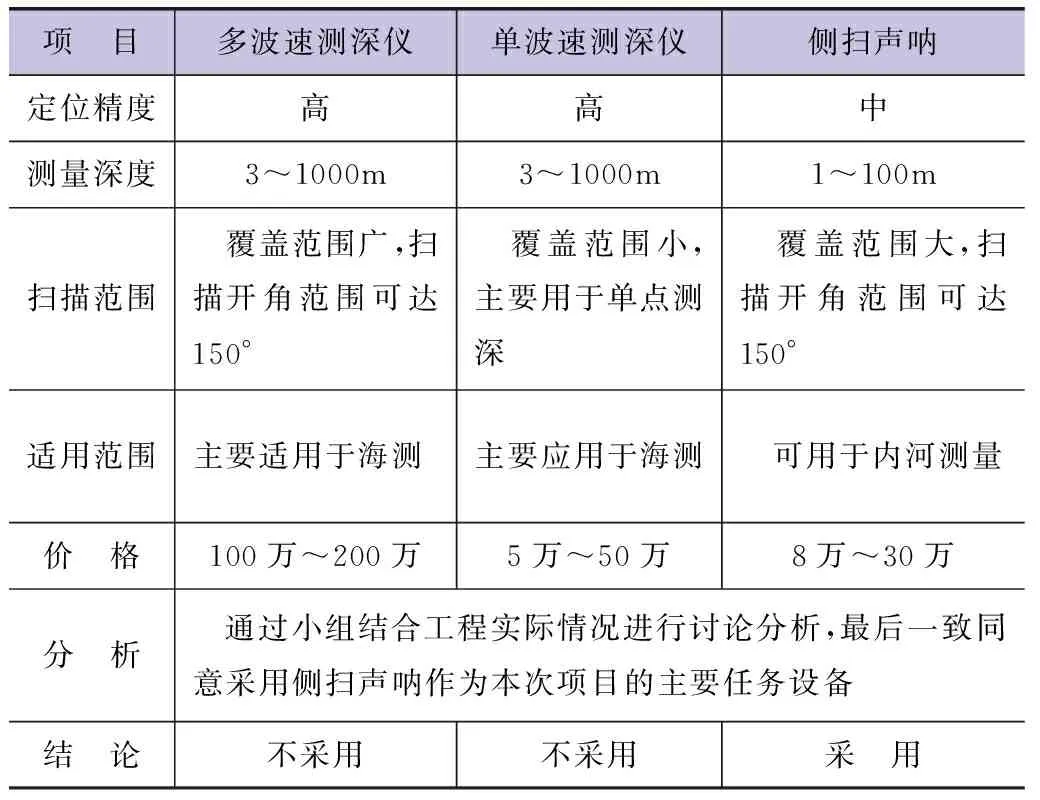
表8 声呐系统优选分析
通过方案比较,优选采用侧扫声呐作为本次项目的主要任务设备。
6.2.2.2 声呐安装
将侧扫声呐换能器安装在船身重心位置上,远离螺旋桨、发动机等电子设备,以免相互干扰,确保安装后不改变船身重心。将信号线接入船舱自动驾驶器中,与地面站平台连接稳定后,将接线口打胶并进行防水处理。确保无误后进入调试阶段。
6.2.2.3 调试及检查
小组成员通过4次试验(见表9),并查阅资料,逐步将测量精度提高,最后将测深精度确保在小于1.0cm范围以内。

表9 声呐试验过程记录
结论:通过试验验证,达到目标预期效果。
7 效果检查
通过方案比选和实施,小组成员正式前往磁湖验证研究成果。
实施对策后,在清淤前后进行了探测和比对,将欠挖的部分进行返工处理,使清淤工作的计量更加有效。
通过无人船对清淤前后的高程对比,我们找出了6个不符合业主要求的清淤点,其中5个欠挖点、1个超挖点(见表10)。随后再次安排施工队伍对这6个不合格点进行返工,返工后数据见表11。
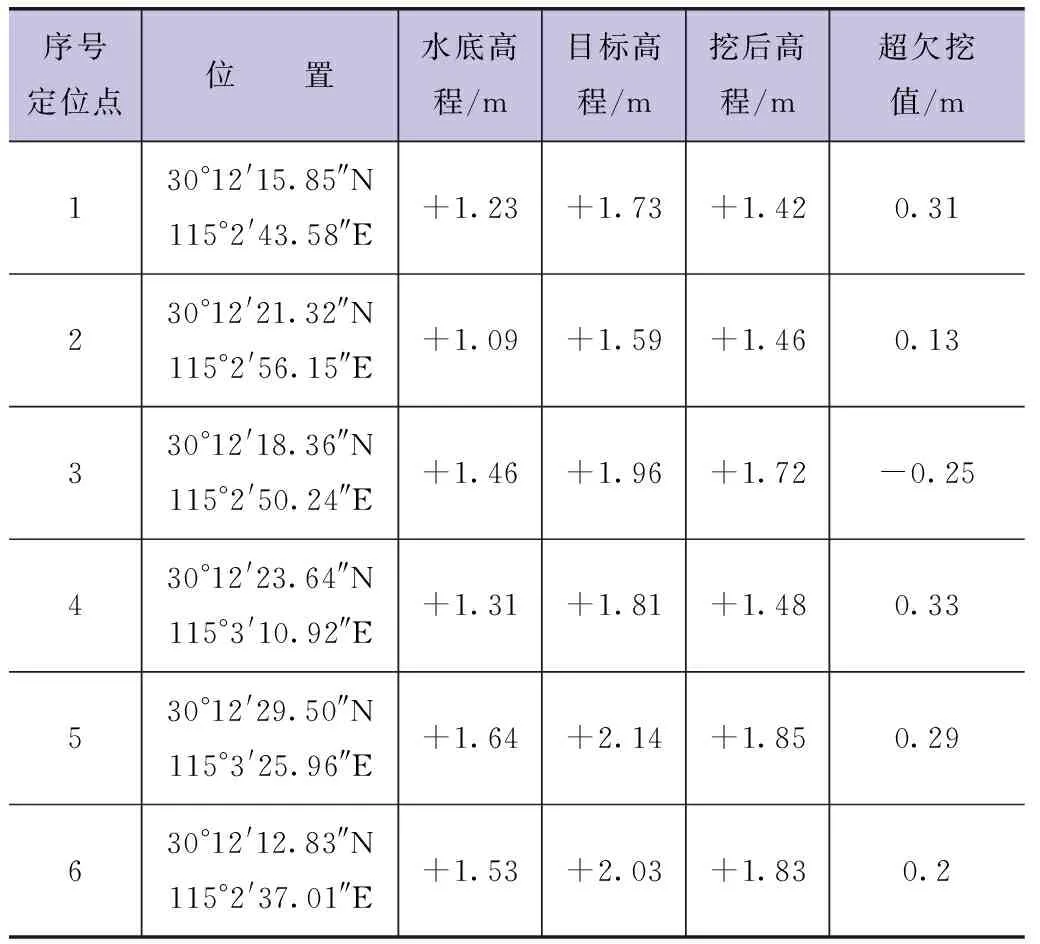
表10 第一次清淤数据超欠挖过大的位置
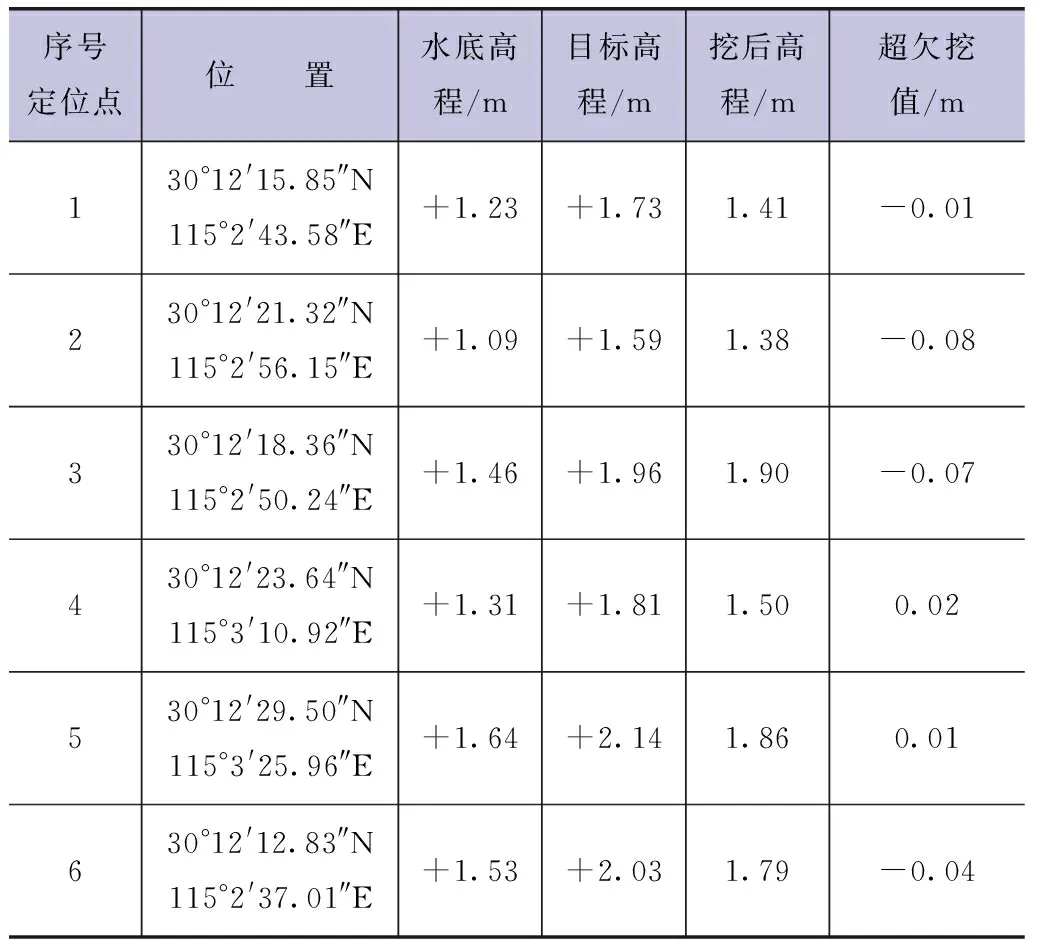
表11 第二次清淤返工后数据
由第二次清淤数据可知,目前清淤误差值在-0.08~+0.02m之间,满足小组设定的误差要求。
此次QC小组活动,小组成员首次在公司范围内将自动化无人船与传统的水利工程项目相结合。采用无人船搭载声呐成像系统的方式,对河床岸线进行全方位的探测,省去人工徒手插竹竿的复杂而繁重的工作,大大改善了以往河床清淤验收的弊端,降低了传统清淤验收的误差值,提高了河床清淤的准确度。清淤前后声呐成像对比见图8。
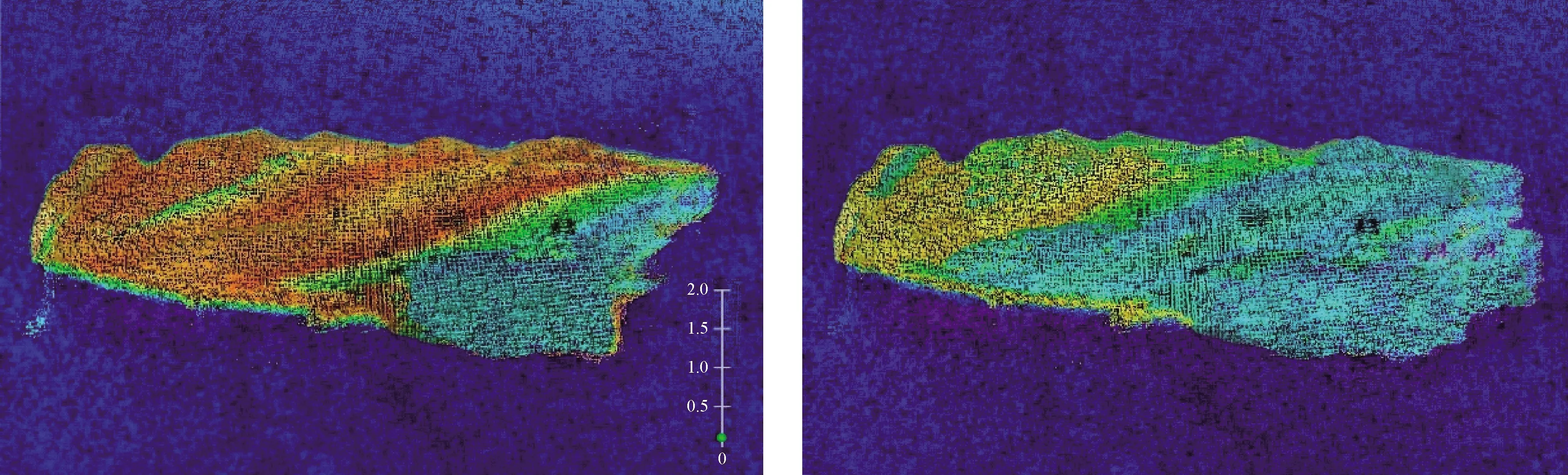
图8 清淤前后声呐成像图
8 制定巩固措施
8.1 标准化
小组将无人船在清淤工程的实施过程中行之有效的对策和相关措施纳入到巩固措施阶段,编制了标准化措施(见表12),经公司工程技术部门审核、总工程师审批,已在公司相关工程上推广应用。

表12 无人船在清淤工程中的相关标准
8.2 巩固期应用
小组活动成果纳入标准化成果后,小组连续3个月对成果进行多次应用,应用结果如表13所列。
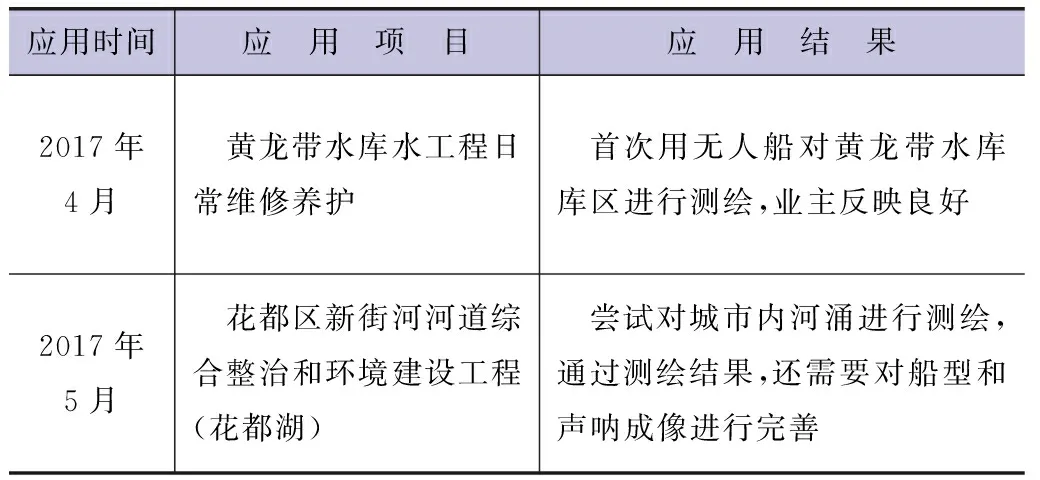
表13 巩固期的应用
9 总结与下一步打算
9.1 QC活动总结
本次QC小组活动严格遵循PDCA程序,先后经过10次大的活动、20次小的活动,陆续不断开展了四个阶段即计划(Plan)、实施(Do)、检查(Check)和处理(Action)的工作,分析问题时做到了一环紧扣一环、具有逻辑性;并且在各个阶段的决策时能做到QC小组成员深入施工现场调查取证,以客观事实为依据,用数据说话;能恰当准确地应用统计图表来归纳问题、发现问题和分析问题。
9.2 下一步打算
在以后的工作中,我们准备继续以健全制度、提高质量、创造效益为核心开展QC活动,针对无人船在内河河床测量的问题开展新一轮的PDCA循环,全面提高无人船搭载声呐的成像精度和项目组全体员工的综合素质。在此次的QC小组活动过程中,我们发现无人船在水利工程的应用上仍然有提升的空间,因而,为了更好地开展无人船在水利行业上的应用,我们下一个QC小组活动的课题初步定为“无人船在监控内河水质上的应用”。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
陕西水利(2022年11期)2022-11-29
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年11期)2022-07-15
建材发展导向(2021年19期)2021-12-06
建材发展导向(2019年7期)2019-11-29
船舶标准化工程师(2019年4期)2019-07-24