
航天伺服用舵轴转角传感器测量分析
2020-06-29 07:21王贺龙姜玉峰魏泽宇潘龙齐冲
机电信息 2020年12期
王贺龙 姜玉峰 魏泽宇 潘龙 齐冲


摘要:以航天伺服机构常用的某型角位移传感器为研究对象,针对该角位移传感器在实际使用过程中遇到的问题进行研究,建立数学模型并进行了仿真分析,探讨了影响测量结果的因素,提出了提高角位移测量准确性的建议和措施。
关键词:伺服机构;角位移传感器;ADAMS
0 引言
随着航天伺服技术的发展,对伺服机构的控制精度和动态性能要求越来越高,航天伺服机构或直接采用角度输出的形式,或为直线位移式输出方式,通过摇臂等连杆机构实现直线到转动的转换。两种方式均是通过传动机构传动实现负载的转动或摆动,完成控制系统对姿态的调整,控制系统对伺服机构的指标要求往往是舵轴或喷管负载终端的实际响应,通常用角位移传感器来测量实际的摆动输出。
本文以航天伺服机构常用的某型角位移传感器为研究对象,以其测量原理和测量方式为基础,结合实际安装情况,建立数学模型,并通过理论结合仿真进行分析,对影响测量输出结果的因素进行研究,最终给出明确的分析结论。
1 产品工作原理
采用模擬量直接输出的拨叉型角位移传感器,其以结构简单、抗干扰能力强、输出信号延迟小等特点,在航天伺服测量领域应用较为普遍。其原理类似于滑动变阻器,内部设计有环形电阻,电刷与环形电阻接触,电刷在转轴的带动下转动,产生角度差从而引起输出电压量的变化,达到角度测量的目的。其安装形式如图1所示,在负载转动时,带动拨叉运动,进而带动角位移传感器转动产生输出。
本文针对某项目角位移传感器使用过程中遇到的问题进行分析,其安装三维示意图如图2所示,二维剖面图如图3所示。
2 理论分析
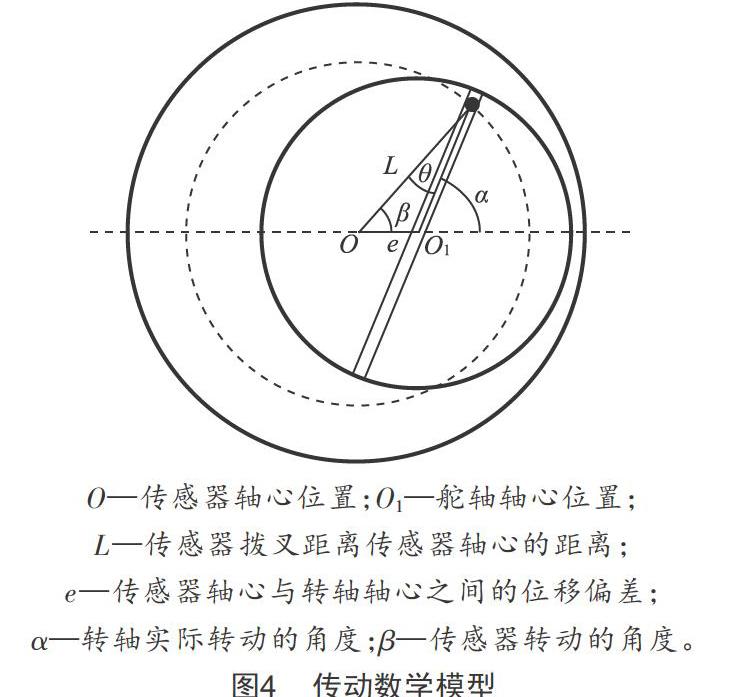
根据安装结构分析,角位移传感器与安装支架通过止口轴向定位,若安装支架定位孔与舵轴之间同轴度存在偏差,会导致角位移传感器转轴与舵轴之间同轴度难以保证,造成角位移传感器输出转角与舵轴转角之间出现偏差,传动数学模型如图4所示。
当偏差e不为零时,角度β随α变化的计算公式如下:
因此,偏心量e会使角位移传感器输出与舵轴实际摆角之间存在角度差。通过上述公式可以看出,适当增大L,即适当增大拨叉长度,有利于消除因同轴度带来的偏差影响。
实际情况下,两轴偏心连线在360°平面内随机变化,可能与拨叉之间存在任意夹角,由此可知角位移传感器正负向输出摆角不对称。
3 仿真分析
将上述角位移传感器安装三维模型导入ADAMS建立传动虚拟样机模型,发送指令摆角幅值为30°、频率为0.02 Hz的正弦信号,最大差值出现在12.5 s和37.5 s,仿真结果如图5所示;并以指令为横坐标,以角位移传感器反馈为纵坐标绘制了角位移回环曲线,可以看出角位移传感器输出最大摆角29.3°与理论计算吻合。
4 结语
本文以航天伺服机构常用的某型角位移传感器为研究对象,结合具体试验过程中遇到的问题,通过建立数学模型和仿真分析,给出角位移传感器测量误差的详细理论分析,找出了误差原因,对指导实际工程应用具有重要意义。
[参考文献]
[1] 李朋,周军,高智刚.舵机转角精确测量系统的设计[J].测控技术,2012,31(6):18-21.
[2] 江涛,黄声华,万山明.一种基于DSP的伺服电动机转速检测方法[J].微电机,2006,39(3):86-88.
[3] 曾经梁.连杆角位移再现机构的模糊稳健优化设计方法[J].机械科学与技术,2003,22(6):974-976.
收稿日期:2020-03-20
作者简介:王贺龙(1988—),男,河北唐山人,硕士,工程师,研究方向:伺服系统设计。
