
无人驾驶时代,还有哪些短板要补齐
2020-06-30 14:32薛山
电脑报 2020年18期
薛山
就在五一节前,高德地图与自动驾驶公司AutoX共同启动无人驾驶网约车RoboTaxi项目,并在上海嘉定区开启招募活动,可按呼叫普通网约车的操作呼叫无人车,在指定许可自动驾驶范围内免费体验,体验期结束后,项目将正式上线。
诸多限制之下的蹒跚起步
假设技术已经达到理想状态,在这种前提下无人驾驶优点非常多,首先是免去了驾驶负担,车辆会自动判断路况、车况、车间互联等,并严格恪守交通法规,安全性大幅提升。对乘客而言,路程规划透明且严格按此执行,同时车内接触人员相对更少,女性乘客夜间乘车也无需再担心司机素质的问题。
事实上AutoX也并不是国内无人驾驶车辆的第一例,在今年4月中旬,百度自动驾驶项目Apollo Robotaxi阿波罗智行服务就在长沙梅溪湖和洋湖区域开放运营,它们的共同点都是基于自家地图导航体系,但因为自动驾驶需要非常周全的路政配套基建,所以目前的自动驾驶路线都有严格的限制,记者试乘时就發现叫车后它并没有按照最近路线行驶到接驾位置,而是稍有绕路,并且两次在同一地点测试均为此线路。
除此之外,这些自动驾驶网约车都配备了安全员,一来是监测数据,二来是对万一出现的紧急状况进行人工干预。整个乘车过程都遵循了道路限速,并准确识别了红绿灯和前后车状态,能在正确的节点就行变道、超车、并道等操作,整个体验还是很顺畅的,但记者也注意到,目前的自动驾驶落地项目要么选择在路况本身就很好的地段,要么运营时间避开了早晚高峰,所以大家关心的拥堵路况会如何还无可知晓。
事实上早在2年前的2018年5月1日,我国《智能网联汽车道路测试管理规范(试行)》就已实施。按照规定,自动驾驶包括有条件自动驾驶、高度自动驾驶和完全自动驾驶。车辆上路测试前须在封闭道路与场地进行实车测试,经第三方检测机构认证并领取临时号牌后方可上路。测试车辆要张贴“自动驾驶测试”字样,只能在指定路段开启自动驾驶模式。显然,无论高德AutoX还是百度Dutaxi,都属于这一阶段。
与此同时,测试车辆须全程搭载自动驾驶安全员,在测试过程中,当安全员发现车辆处于不适合自动驾驶状态或系统提示需人工操作时应及时接管车辆,这也是符合规定所述的,而测试期间一旦出现违法或事故,由公安机关交通管理部门按照现行道路交通安全法律法规对安全员进行处理。所以这一阶段的自动驾驶仍属于非常原始的阶段,但至少是从实验室落到了实地,仍然算得上质的突破。
车联网将是另一大基建重点
大家应该都听说过多车连续追尾事故,跟车近当然是关键原因之一,但人在这种情况下的反应偏慢也是重要因素,数据表明,一般的人类驾驶员从观察到前方突发障碍到踩下刹车踏板平均需要1.6秒,而且随年龄和注意力状态的变化而变化,这意味着即便是50公里的时速,车辆在反应时间内也会向前行驶超过20米,更何况高速路段的时速往往远高于此,而如果将此交由激光雷达或摄像系统的自动驾驶来处理,将会缩短到0.5秒,也就是50公里时速时前行7米就能进行制动,再加上路上行驶的车辆众多,所以,车联网的覆盖越广、吞吐量越大、延迟越低,就越有利于安全行车,而目前来看对此最有前景的技术就是5G通信标准。
在很长一段时间都可能将会是无人/有人驾驶混合的大环境下,阿里巴巴就曾倡议修建针对无人驾驶汽车的专用封闭式公路、厂区或景区,在这样的场景下车载5G通信设备可利用其10~20Gbp/s的高带宽、每平方公里100万个连接点的高并发,以及毫秒级的低延迟特性来动态采集并传播车辆行驶、路况、天气信息并有针对性地进行行车规划,这样一来所有车辆都行驶在高速、稳定、低能耗且安全系数更高的状态下,可大大降低物流成本。
在城市道路设计上,5G的技术优势可以实现路况事实分析并动态调整交通信号灯的时长,结合电子灯牌系统也能对路口车道进行动态规划,比如四车道的单条左转车道拥堵,在不明显影响后续道路路况的情况下,就能动态调整为双左转车道。
技术突破两步走:先搞定车载硬软件系统
很明显,从有条件自动驾驶升级到高度自动驾驶乃至完全自动驾驶首先需要挣脱“人”的因素,也就是摆脱安全员也能独立上路,这意味着需要大量的传感器来替代人类的视听能力,而且行驶途中的路况变化可谓瞬息万变,因此也需要预存储大量行车数据,同时还要有超低延迟的车联网来保证车间数据的互通。第一,也是最重要的自然是解决“看”的问题,事实上早在2006年,美国国防部高级研究计划局,也就是DAPPA设立的无人驾驶汽车挑战赛上就出现了激光雷达(LiDAR)传感器的身影,在2014年《Top Gear》第19季度第5集里主持人詹姆斯·梅就驾驶路虎揽胜与自动驾驶卡车TerraMax来了一场越野较量,后者通过安装在车顶的机械旋转式激光雷达作为车辆的“眼睛”,通过发射激光、遭遇障碍物折返所得的时间差来算出距离,形成驾驶环境的3D轮廓,在基座高速旋转的状态下实现360°无死角扫描,得到厘米级的高精度图像。
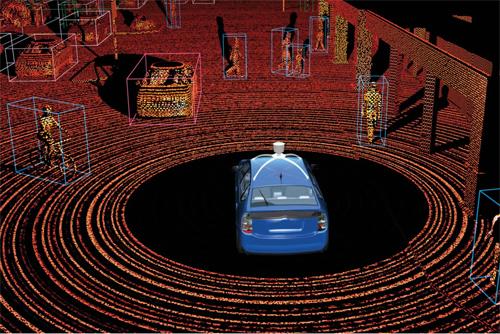
旋转式激光雷达的机械成本很高,比如此前谷歌无人车的激光雷达成本就高达80000美元,并且靠批量生产堆规模经济这条路显然行不通,选择低性能版又会导致潜在的安全性问题,所以现阶段已转向固态激光雷达方向,简单来说就是去掉了成本最高的旋转机械结构,优点是体积小易于集成在车壳内,虽然视野也大幅减小到110°左右,但因为单个成本也大幅下降到250美元甚至更低,所以能够通过多传感器的方式来实现全视野覆盖。
激光雷达可以说是硬件型方案,而以特斯拉为代表的“视觉计算驾驶”则是更偏软件派,去年发布了基于三星14nm制程打造的Autopilot 3.0全自动驾驶计算机,每秒可处理2300帧数据,并很早就把神经网络学习部署到了实车当中,简单来说就是特斯拉收集各种环境、天气条件数据,也会收集车辆的异常道路表现数据,结合前置毫米波雷达、摄像头的数据以及神经网络来对环境进行实时3D渲染,并利用新硬件进行高速处理。
当然,依赖摄像头也就意味着需要图像传感器拥有较好的红外性能以便于夜间行车,同时也需要高动态范围来准确辨识大光比环境,比如进出隧道,同时还要有较强的抗闪烁性能,这样才能准确识别LED交通指示灯,与此同时还要考虑到气候因素的影响……总体来说这些技术细节近年来一直都在进步,未来可期。
编辑总结
实事求是地说,自动驾驶无论从驾驶还是乘坐的角度来说,或仍将长时间处于有条件自动驾驶或辅助手动驾驶阶段,毕竟它牵扯的行业覆盖面比较大,并不完全是汽车本身,从技术上来看面对复杂路况的稳定性也需要更多的实地测试数据支撑,同时还要等待相应法律法规的继续完善,属于未来价值较高的“长期工程”。
猜你喜欢
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
记者摇篮(2018年7期)2018-10-30
记者摇篮(2018年7期)2018-10-30
现代职业教育·中职中专(2018年4期)2018-05-14
金山(2018年3期)2018-04-12
新媒体研究(2014年14期)2014-08-22
现代企业文化·理论版(2011年12期)2011-09-28
移动通信(2011年23期)2011-02-06
