
轮毂电机驱动汽车差动助力转向与稳定性协调控制
2020-07-04 02:27高超张缓缓李庆望严帅
智能计算机与应用 2020年3期
高超 张缓缓 李庆望 严帅


摘要:针对轮毂电机驱动汽车,本文建立了整车模型和差动助力转向系统模型,根据轮毂电机驱动汽车可以独立控制左右转向轮输出力矩的特性,通过控制汽车左右转向轮的差动力矩来实现减小驾驶员方向盘手力的目的,从而代替现有的电助力转向系统。针对电动汽车行驶稳定性,设计了以车辆质心侧偏角和横摆角速度联合控制的横摆力矩控制器;针对差动助力转向和横摆力矩控制各自的特点和相互影响的关系,建立了差动助力转向与横摆力矩控制的可拓联合控制系统。最后基于Matlab/Simulink 与 Carsim联合仿真平台,利用经典的双移线工况进行了人车闭环仿真分析。仿真结果表明:联合控制系统能有效地改善车辆的转向轻便性和行驶稳定性,显著提高了车辆的操纵性能。
关键词: 轮毂电机驱动汽车; 差动助力转向; 稳定性控制
【Abstract】 For the hub motor drive car, this paper establishes the whole vehicle model and the differential power steering system model. According to the hub motor, the car can independently control the output torque of the left and right steering wheels, and reduce the driving torque by controlling the differential torque of the left and right steering wheels. The purpose of the steering wheel is to replace the existing electric power steering system. Aiming at the driving stability of electric vehicles, an extension joint controller based on the vehicle's centroid side yaw angle and yaw rate is designed. Aiming at the difference between the characteristics of the differential power steering and the yaw moment control and the mutual influence, joint control system for dynamic steering and yaw moment control is established. Finally, based on the Matlab/Simulink and Carsim co-simulation platform, the closed-loop simulation analysis of human-vehicle is carried out by using the classical double-shifting working condition. The simulation results show that the joint control system can effectively improve the steering flexibility and driving stability of the vehicle, and significantly improve the handling performance of the vehicle.
【Key words】 hub motor driven vehicle; differential power steering system; stability control
0 引 言
汽車转向性能是汽车极为重要的性能之一,不仅能影响到汽车的操纵稳定性,而且对汽车的行驶安全也有着巨大的影响。目前,随着汽车电子技术的发展,人们对汽车转向性能的要求也日益提高。汽车转向系统先后经历了机械转向、液压助力转向、电子液压助力转向、电动助力转向以及最新的线控转向等阶段[1]。差动助力转向系统(Differential Drive Assist Steering,DDAS)结构简单,适应轮毂电机驱动汽车的特点,是未来助力转向系统的发展趋势[2],也是本文主要的研究对象。但是在差动助力系统工作时,会给车辆带来额外的横摆力矩,从而影响车辆行驶的稳定性,如何在保证车辆行驶稳定的前提下尽可能地提供差动助力来减少方向盘手力是本文研究的主要内容。
1 差动助力转向的原理
对于传统的燃油车而言,由于存在差速器结构,其左右车轮的驱动力几乎是相同的。对于轮毂电机驱动汽车,4个车轮的驱动力是独立可控的,所以左右车轮的差动力矩可以不同。研究中将汽车左右转向轮的驱动力绕各自主销轴线力矩的差值定义为差动转向力矩,如图1所示。故在研究转向特性时,传统燃油车的往往将其忽略,而轮毂电机驱动汽车差动转向力矩不再为零[3]。转向系统存在转向梯形结构,所以差动转向力矩能够驱动左右转向轮转向。通过改变左右转向轮的驱动力大小,即可达到利用差动转向力矩提供转向助力的目的。
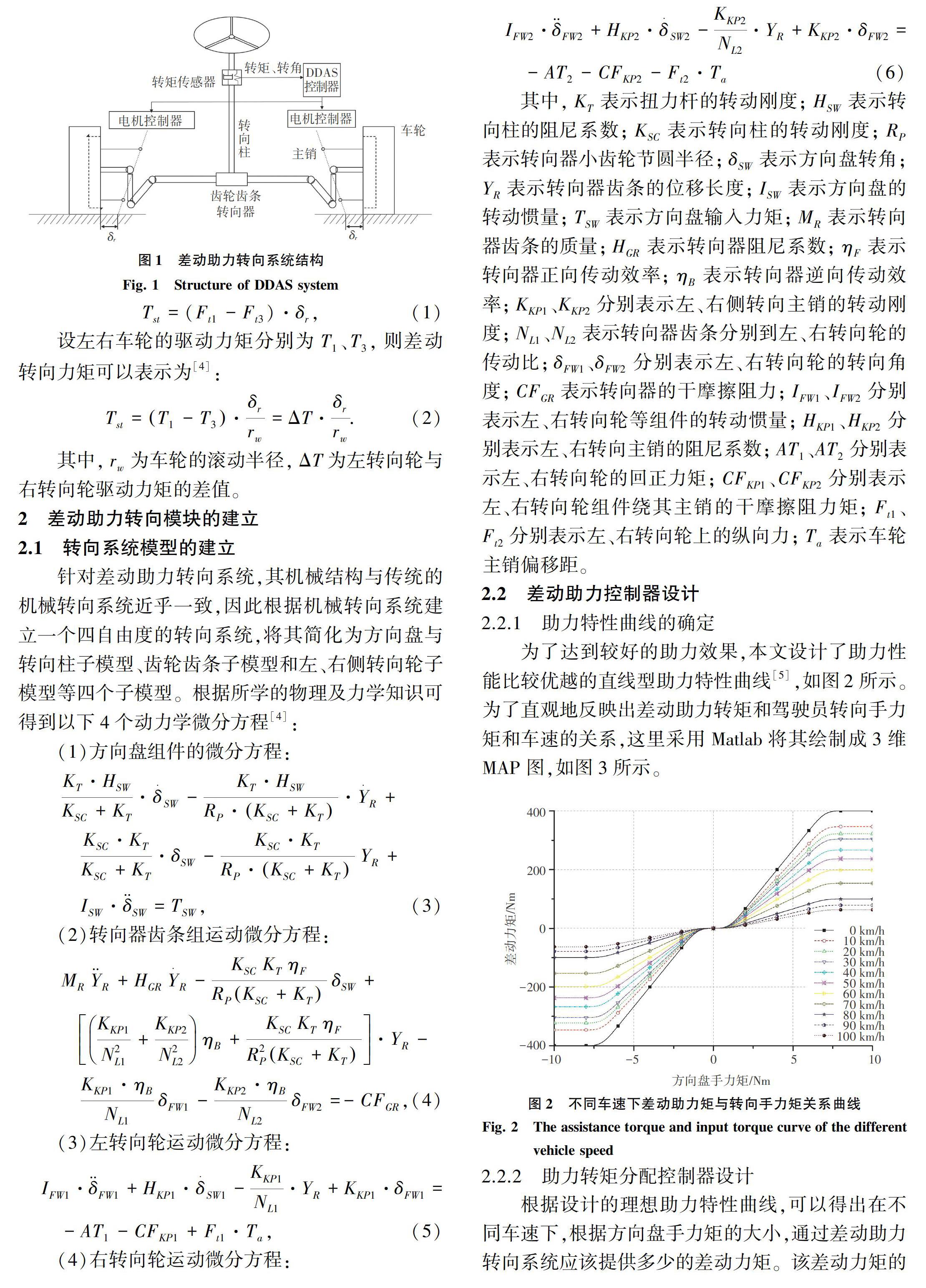
2.2.2 助力转矩分配控制器设计
根据设计的理想助力特性曲线,可以得出在不同车速下,根据方向盘手力矩的大小,通过差动助力转向系统应该提供多少的差动力矩。该差动力矩的值是根据不同工况下为了达到理想手力矩,计算出需要的助力,然后参考公式(2)计算出汽车左右转向轮的输出力矩差值。通过查找MAP图的方法来保证实际转向手力矩跟踪理想的转向手力矩,从而达到在不同车速时既能提高转向轻便性,又能保证驾驶员路感的目的[6]。
2.3 差动助力转向系统的仿真分析
为了验证本文通过Matlab/Simulink平台搭建的差动助力转向系统,是否具有可行性,以及其助力效果能否达到减小驾驶员手力矩的目的。分别对低速、中速和高速三种不同车速下进行仿真,首先针对中低速,将方向盘输入为方向盘向右迅速转90°,并保持,车速分别设置为30 km/h和60 km/h,对比有无差动转向系统下的驾驶员手力与方向盘转角的曲线。为了更好地模拟一般路面情况下的转向,路面选择柏油道路,其附着系数为0.8。
2.3.1 车辆匀速行驶速度为30 km/h
30 km/h转向轻便性对比见图5,30 km/h各车轮转矩见图6。通过图5和图6可以看出,当车速为30 km/h,方向盘输入转角为90°的角阶跃工况下,对比有无差动助力系统作用下的方向盘手力矩的大小,可以看出手力减少了约2.48 Nm,下降了约47.1%。此时车辆的左右转向轮的驱动差值ΔT约为172 Nm,证明差动助力转向系统在车辆低速转向时起到了明显的作用。
2.3.2 车辆匀速行驶速度为60 km/h
当车速处于60 km/h时,方向盘转角依然为90°角阶跃输入,通过实验仿真可以看出,有差动助力系统的轮毂电机汽车转向时的方向盘手力矩要比无差动助力的汽车减少了大约50%,同时也可看出此时的车辆的左右转向轮的输出力矩差值ΔT约为281 Nm。而且60 km/h车辆行驶轨迹对比如图7所示。通过图7,对比有无差动助力系统下车辆的行驶轨迹可以得出差动助力转向可以减小车辆转向不足的问题,改善了其过弯能力。在中等车速下,差动助力转向系统效果依然明显。
2.3.3 50 km/h方向盘转角正弦输入
为了模拟车辆真实行驶过程中的换道的工况,将车速调整到50 km/h,方向盘转角为正弦输入。第8 s时,方向盘输入一个频率为0.2 Hz,幅值为45°正弦波。50 km/h转向轻便性对比见图8,50 km/h各车轮转矩见图9。通过图8、图9得出了有差动助力转向系统的车辆要比无差动助力系统的车辆减少了2.98 Nm的方向盘手力矩,节省了驾驶员大约43%的体力消耗。方向盘转角与方向盘手力关系曲线见图10。
通过图10,对比有无差动助力转向系统车辆的方向盘转角与方向盘手力关系,可以看出,差动助力转向能明显提高转向轻便性,改善车辆的避障能力。
3.2 横摆角速度PID控制器
PID控制是发展时间最长的控制策略之一,因为其简单的算法和较高的可靠性,在工业设计中被广泛的应用,尤其适用于建立精确数学模型的确定性控制系统中。在汽车工程领域研究探索中,使用PID控制规律进行车辆稳定性控制也是最为普通的一种方法[9]。
在设计时,控制器的输入量为汽车的实际横摆角速度ωri和理想的横摆角速度ωrd的差值,控制器的输出值则是横摆调整力矩Mtz的大小,最后再由输出力矩分配模块进行后轮输出力矩的再分配。
3.3 质心侧偏角PID控制器
大部分的汽车稳定性控制系统的控制变量都选取汽车的质心侧偏角作为控制参数。汽车实际的质心侧偏角一般是通过估算的方法来实现的。本文也是采用了控制效果较好且控制方法比较简单的PID控制。
3.4 横摆角速度和质心侧偏角可拓联合控制器
结合上文中所求解的关联函数以及对测度模式的划分,对横摆角速度和质心侧偏角进行切换控制。切换控制器可分为上层控制器和下层控制器两部分,如图11所示。
在上层控制器中,利用可拓理论确定汽车行驶稳定性指标与可拓集的关联度,对汽车状态进行识别划分。即采集汽车动力学模型实际横摆角速度和实际质心侧偏角,选取实际质心侧偏角βr、实际横摆角速度ωri和参考横摆角速度ωrd的偏差Δω作为特征量,组成特征状态S(ωr,βr);建立二维可拓集合,依据汽车行驶状态,根据车速、路面附着系数、前轮转角等影响因素,分别確定横摆角速度偏差Δω和实际质心侧偏角βr的经典域及可拓域边界值,划分二维可拓集合的经典域、可拓域和非域,对应汽车稳定状态、趋于失稳状态以及失稳恶化的状态;接着将二维可拓集合中的可拓距转换到一维可拓集合中求解,获得关联函数[10];同时,根据关联函数划分测度模式,确定汽车不同行驶状态下所对应的控制策略。最终,上层控制器向下层控制器发送关联函数以及汽车特征状态所处控制区域信号。
3.5 仿真分析
3.5.1 Fishhook实验
为了验证基于横摆力矩的轮毂电机驱动电动汽车稳定性控制策略,进行了不同控制策略的对比试验。其中包括横摆角速度单独控制、质心侧偏角单独控制和联合控制的3种不同的控制策略,并将其和无控制的进行对比。仿真实验中设置的方向盘转角输入如图12所示,车速设置为60 km/h。在路面附着系数为0.85工况下进行了鱼钩(Fishhook)实验。获得仿真结果如图13~图15所示。
3.5.2 正弦输入
为了更好地验证联合控制的效果,进一步进行正弦工况的仿真,仿真中将车速设置为80 km/h,路面工况则取附着系数为0.8的柏油路面,其中方向盘的转角输入如图16所示。当汽车行驶车速为80 km/h,路面附着系数为0.8时,获得仿真结果如图17~图19所示。
根据图17可知,当方向盘转角为正弦输入的仿真工况时,此时车辆的横摆角速度能够比较好地反映出汽车行驶状态,所以横摆角速度单独控制与联合控制下的横摆角速度曲线波动都非常小,变化范围在±10°之间;而质心侧偏角单独控制下的横摆角速度就比较大,在13°~15°之间变化;相比较有控制的车辆状态,在无控制下的汽车横摆角速度则是最大的,在±15°之间变化。而在相同工况下,分析后可以看出联合控制和横摆角速度单独控制下的质心侧偏角波动范围最小,在±0.95°之间变化;而质心侧偏角单独控制下的变化范围在±1.1°;汽车质心侧偏角变化范围最大的还是在无控制下,变化范围达到了±1.3°。
综合图12~图19可以看出,在鱼钩实验工况下,联合控制与质心侧偏角单独控制的效果近乎相同,均比横摆角速度单獨控制更加优异;而在转向盘转角正弦输入工况下,联合控制的效果又与横摆角速度单独控制效果相似,且都要优于质心侧偏角单独控制。故综合考虑,本节提出的横摆角速度和质心侧偏角联合控制器能适应多种工况,效果要比横摆角速度单独控制和质心侧偏角单独控制更加优秀。
4 差动助力转向和横摆力矩协调控制
4.1 上层控制器
差动助力转向系统在工作时,会使左右转向轮产生差动力矩,该差动力矩在对转向系提供助力的同时,也会对汽车整体产生一个横摆力矩,进而影响整车稳定性。因此,为了保证汽车行驶的稳定性,在趋于失稳时需要加入横摆力矩控制,这样不仅拓展了DDAS的工作范围,还能提高整车稳定性[11]。但是,当保证助力效果难以维持汽车行驶稳定性时,需要取消DDAS,只对汽车进行横摆力矩控制,最大可能地保证整车稳定性。
综上,实现协调控制需要研究两方面内容,一是如何确定汽车转向行驶的稳定性边界,划分汽车行驶状态;二是如何确定差动助力矩与横摆力矩之间的关系,共同实现稳定性控制。由此建立可拓协调控制器。对此可做阐释分述如下。
4.3 仿真结果及分析
利用Carsim和Matlab/Simulink联合仿真,对基于横摆力矩的差动助力转向可拓协调控制系统进行验证。由于本文重点是对差动助力转向性能的延伸,提高装备差动助力转向系统电动汽车的稳定性,故对差动助力转向控制系统和基于横摆力矩的差动助力转向可拓协调控制系统进行对比。采用汽车在实际行驶中容易失稳的双移线工况作为仿真工况,以验证可拓协调系统的控制效果。
首先在路面附着系数为0.8的双移线工况下仿真,车速80km/h。仿真结果如图20~图25所示。
根据图20可知,与单独差动助力转向控制相比,可拓协调控制提高了汽车的道路跟踪能力。单独差动助力转向控制的汽车在横坐标100~120 m之间、150~160 m之间在纵向位移上偏离程度较大,最大偏移距离达0.26 m,横向位移最大偏差出现在横坐标60~75 m之间,最大偏差为4.3 m;可拓协调控制的汽车纵向误差能保证在0.18 m以内,误差改善了30%,横向位移误差不超过3.9 m,改善了10%。根据图21~图23可以发现,可拓协调控制下的横摆角速度、质心侧偏角和侧向加速度有着明显减小,其均方根值分别为2.72 °/s、0.104 °和0.108 g,与单独DDAS控制下的4.26 °/s、0.138 °和0.108 g相比,分别优化了36.1%、24.6%和14.5%,显著提高了汽车的稳定性。
由图24~图25中的车轮转矩变化可知,当DDAS单独控制时,前轮转矩变化较大,产生了较大的差动助力矩,而后轮转矩没有产生转矩差;当采用可拓协调控制时,由于汽车在5~14 s之间基本上处于可拓域内,前轮转矩有着明显的减小,同时后轮转矩发生改变,产生转矩差,抑制整车稳定性的恶化。双移线工况方向盘转矩见图26。由图26可知,当汽车处在可拓域时,前轮产生的差动助力会适当减小,结合横摆力矩以提高汽车稳定性,而此时的转向盘转矩则会相应增大,但也能保证在-8 Nm与8 Nm之间变化。
综上所述,可拓协调控制系统拓展了差动助力控制系统的工作范围,当汽车运动状态处在可拓域内,此时控制系统会相应地减小前轮差动助力转矩,同时通过在后轮产生差动转矩的方式加强横摆力矩控制,进而保证汽车行驶的稳定性。仿真结果证明,该方法能够减小横摆角速度及质心侧偏角,提高道路跟随能力,保证汽车行驶稳定性。
5 结束语
(1)通过Matlab/Simulink搭建出了差动助力转向系统模型,针对其可行性和转向轻便性进行了计算机仿真分析,仿真结果表示本文建立的转向系统模型以及转矩分配控制器能有效地进行助力控制,起到减小驾驶员方向盘手里的作用。
(2)通过Simulink搭建的横摆力矩控制器可以很好地在横摆加速度控制和质心侧偏角控制之间选择最优控制方案并切换,再通过仿真验证其效果明显,且能提高汽车稳定性。
(3)通过搭建的可拓协调控制器分别对差动助力转向系统和横摆力矩控制器进行加权,从而使得在不同控制域之间,保证了汽车行驶稳定的情况下尽可能地提供差动助力的效果。
参考文献
[1] 季学武, 陈奎元. 动力转向系统的发展与节能[J]. 世界汽车, 1999(10):7.
[2]沈晨. 四轮独立驱动电动汽车差动助力转向系统控制研究[D]. 南京:东南大学,2016.
[3]王庆年,王军年,靳立强,等. 用于电动轮驱动汽车的差动助力转向 [J]. 吉林大学学报(工学版),2009,39(1):1.
[4]王军年. 电动轮独立驱动汽车差动助力转向技术研究[D]. 长春:吉林大学,2009.
[5]李隐卓. 电动轮驱动汽车驱动助力转向理论及动力学控制研究[D]. 长春:吉林大学, 2007.
[6]CABRERA J A, ORTIZ A, CARABIAS E, et al. An alternative method to determine the magic tyre model parameters using genetic algorithms[J]. Vehicle System Dynamics, 2004 , 41 ( 2 ) : 109.
[7]杨耕, 罗应立. 电机与运动控制系统[M]. 北京:清华大学出版社, 2006.
[8]施国标, 申荣卫, 林逸. 电动助力转向系统的建模与仿真技术[J]. 吉林大学学报(工学版), 2007, 37(1):31.
[9]赵玉霞, 朱永存. 汽车原地转向阻力矩经验公式的计算比较[J]. 汽车实用技术, 2015(7):102.
[10]何杰. 分布式驱动电动汽车差动助力转向研究[D]. 上海:同济大学,2014.
[11]宗新怡. 四轮驱动轮毂电机电动汽车转向助力研究[D]. 长春:吉林大学, 2015.
[12]胡长健. 电动轮驱动车辆的驱动力助力转向技术研究[D]. 长春:吉林大学,2008.
[13]孙晓文. 汽车横摆力矩控制与差动助力转向的可拓协调控制[D]. 合肥:合肥工业大学,2017.
