
基于机器人视觉的目标识别与跟踪技术应用研究
2020-07-04 02:15陈易平谌颃
电脑知识与技术 2020年15期
陈易平 谌颃

摘要:目前机器人在工业生产领域已有了广泛应用,基于机器人视觉对运动目标进行识别与跟踪是机器人技术领域的研究热点之一。研究动态环境下机器人对运动目标的识别与跟踪,实现了对动态目标的识别,研究图像预处理过程,改进特征提取和分类判断的算法,提高目标识别准确率和效率,在探索实现工业机器人智能感知和控制系统开发中具有重要的意义。
关键词:机器人视觉;目标识别;目标跟踪;特征提取
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2020)15-0202-02
1引言
随着工业4.0时代的到来,机器人在工业生产领域已得到广泛应用,代替了大量人工完成生产线上的工作,提高了企业的生产效率和降低了人力成本。基于机器人视觉对运动目标进行识别与跟踪是机器人技术领域的研究热点之一。随着AI领域深度学习技术的发展,进一步推动了机器人视觉的应用研究。通过研究目标识别准确度和效率的改进,分析在不同场景环境下,改进了图像分割、预处理等算法;同时研究对比了不同目标跟踪算法,选择了跟踪精度和实时性更好的算法,在探索实现工业机器人智能感知和控制系统研发中具有重要的意义。
2机器视觉的图像识别与目标跟踪技术
基于机器视觉的图像识别技术是一项运用计算机对图像进行处理、分析和理解的技术,它以数字图像处理与识别为基础。传统图像识别技术主要包括图像获取、预处理、特征提取、分类判决等步骤构成,而近年来深度学习的发展,大大提高了图像识别的准确率,与传统识别技术相比,无须人工设计特征,系统可自行学习归纳出特征,降低了使用难度,能够快速实现应用。
基于机器视觉的目标跟踪的基本过程包含两个主要环节,第一个环节是动态目标的识别:通过对连续图像帧序列中的运动目标进行检测,提取其特征,并标注标签,完成目标识别;第二个环节就是对目标进行跟踪,其过程是:先获得运动目标的速度、位置、位移量、运行路径等数据,经过进一步处理和分析,完成对运动目标的行为理解,从而实现对目标的跟踪。目标跟踪技术涉及图像处理、模式识别、人工智能、自动控制等多个领域的知识,是实现智能机器人关键技术之一。针对不同的研究对象要选择不同的跟踪算法,主要包括基于目标区域、基于目标特征、基于目标模型和基于主动轮廓等算法。
3目标识别与跟踪系统的设计
本文选用Arduino机械臂替代工业机器人,集成阶段采用工业机器人样机进行调试。Arduino机械臂是一个开源的软件硬件平台,支持Windows和VC开发环境。机器人视觉系统由1个云台CCD摄像机、1个视频采集卡和1台主机组成,其中摄像机通过视频采集卡与PCI总线相连,能够对云台实现变焦、转向等控制。交互指令系统遵循上下位机制定的通信协议规范,实现机器人作业控制。
3.1视觉子系统的设计
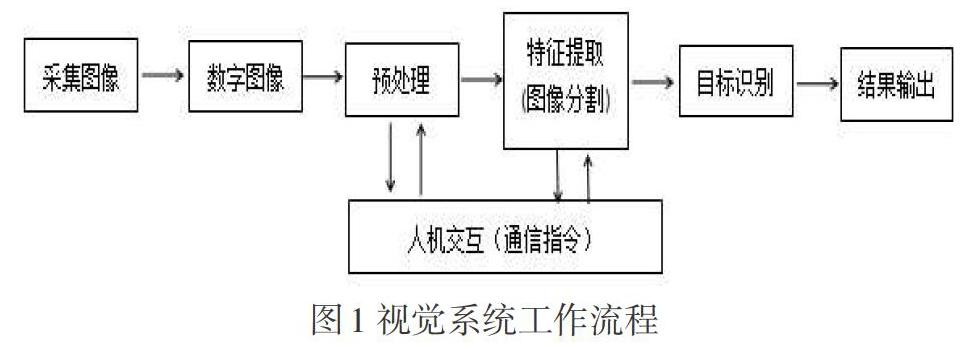
视觉子系统是设计的核心部分,在机器人目标跟踪时,主要负责实时采集图像信息,然后自动处理、分析、理解图像,以获得运动目标的位置、方向、速度等信息,并将信息实时反馈给人机交互系统,其工作流程如图l所示。
3.2图像分割算法
图像分割算法的目的是将目标从图像中分离提取出来,其分割的结果是否精准将会影响到目标识别、提取、定位和跟踪的精确度,必然影响到系统的整体性能。本文在实验中对比分析了在不同场景下阈值化分割、图像边缘检测法和基于区域的图像分割法这三种方法分割效果的优劣,为实际工作场景中选择合适的图像分割算法提供优先选择参考。
3.3摄像机标定模型的确定
摄像机在识别某区域目标时,摄像机标定只涉及两个主要的内部参数,即水平方向的比例系数Px和垂直方向的比例系数Ry,其余参数不重要,在此处可忽略。本课题仅研究近距离跟踪目标的场景,因此采集的区域面积较小,可将采集区域到图像平面的映射近似呈线性关系。
以近距离目标跟踪为例,首先通过手持摄像头的标定方法,测出其所拍摄图像的6个特殊位置点(0,0)、(0,v/2)、(0,v)、(U/2,0)、(u/2,V/2)、(u/2,V)离摄像设备的实际距离为r,考虑图像的对称性,(U,0)、(u,W2)和(u,V)位置点可以不用测量。
3.4运动目标的特征提取
特征提取與特征选择是图像分类和识别的核心问题。其方法是:将数据集T={T1,T2,…,Tk},经过某一变换,如h;,(i=1,2,…,n;n
3.5目标跟踪算法
对于距离远、面积小的目标通常采用相关滤波跟踪算法以提高目标跟踪精度。在研究过程中发现近距离目标跟踪具有一定面积且帧间抖动较大,可以采用窗口质心跟踪或特征匹配跟踪算法以保持跟踪的稳定性和精度。
本文探讨了基于CamShift目标跟踪算法的改进,能够提高目标跟踪的准确度与实时性。该算法基于图像的颜色概率分布跟踪目标,主要应用于与背景存在显著色彩差异的彩色目标跟踪,其核心是MeanShfit算法。MeanShift算法是一种稳健的特征空间分析方法,其实现过程如下:
Stepl.在颜色概率分布图中选取一个大小为s的搜索窗口;
Step2.确定此搜索窗口的初始位置;
Step3.计算搜索窗口的质心;
Step4.将新的搜索窗口质心置为Step3得到的结果(xo,yo);并重新设置搜索窗口大小s。
Step5.重复步骤3和4,直至质心收敛。
将MeanShift算法扩展到视频(连续图像帧),基本思路是将视频图像中的全部帧做MeanShift运算,并将上一帧的结果作为下一帧MeanShift算法的初始值,依此顺序迭代就实现了动态目标跟踪,即形成CamShif算法。
4结论
研究了在动态环境下机器人对运动目标的识别与跟踪,实现了动态图像目标识别功能,采用改进的基于CamShift目标跟踪算法,提高了系统跟踪的准确性和实时性。
猜你喜欢
电子制作(2018年19期)2018-11-14
自动化学报(2017年11期)2017-04-04
科技创新与应用(2016年36期)2017-02-21
科学与财富(2016年28期)2016-10-14
现代电子技术(2015年18期)2015-09-16
噪声与振动控制(2015年4期)2015-01-01
轴承(2010年2期)2010-07-28
