
工业机器人工具坐标系的设置
2020-07-04 02:15何淼
电脑知识与技术 2020年15期
何淼

摘要:该文以FANUC工业机器人为例,从工具坐标系设置的意义出发,分析了不同机器人设置工具坐标系的方法,成功建立了机器人新的工具坐标系,为机器人精确的运动控制奠定基础。
关键词:工业机器人;坐标系;TCP
中图分类号:TP319 文献标识码:A
文章编号:1009-3044(2020)15-0204-02
随着工业4.0的到来以及中国制造2025规划,工业机器人得到了越来越广泛的应用和智能化改造。学习和使用机器人的第一步是建立工业机器人关节之间、关节与工具或工件之间的相对运动关系,即建立工业机器人的坐标系。FANUC工业机器人坐标系有:关节坐标系JOINT、手动坐标系JGFRM、世界坐标系WORLD、用户坐标系USER和工具坐标系TOOL。
在工业实际中,当机器人末端执行器换装工具或发生碰撞变形时,为了实现精确的运动控制,则需要重新设置工具坐标系,以便调试机器人的位姿。本文从工具坐标系设置的意义出发,分析了不同设置方法的特点和适用场合,总结了设置步骤,为FANUC机器人的学习和使用提供了参考。
1工具坐标系TooL
工具坐标系TOOL是用来定义安装在机器人末端执行器的工具中心点(TCP)位置和工具姿态的坐标系,工具中心点TCP一般设置在末端执行器中心,用坐标轴x、Y、z表示,而工具姿态用w、P、R表示。在FANUC机器人默认的工具坐标系中,末端执行器默认为法兰盘,则法兰盘中心为工具坐标系的原点,+x方向为法兰盘中心指向法兰盘定位孔的方向,+Z方向为垂直法兰盘向外,+Y方向则由右手法则判定。
在实际应用中,不同功能的工业机器人会在末端执行器上安装不同的工具,例如喷漆机器人使用喷嘴作为工具,弧焊机器人使用弧焊枪作为工具,搬运机器人常用真空吸盘、手爪等作为工具。因此,随着末端执行器上所装工具的位置与角度的不断变化,工具中心点TCP及方向也会产生变化。为了方便示教,这就需要将TCP移到工具的某一个尖端位置,以建立相应新的工具坐标系,来描述所安装的工具的TCP的位姿。也就是说,新的工具坐标系是相对于默认的工具坐标系经移动及旋转而变换得到的,新的工具坐标系的位置和方向始终同法兰盘保持绝对的位置和姿态关系,但在空间上是一直变化的。
2工具坐标系设置方法的选择
工具坐标系在实际使用中,需要在机器人编程前先行设置,若未定义工具坐标系,将使用默认工具坐标系。FANUC工业机器人在建立新的工具坐标系时,提供了三种方法:直接输入法、三点法和六点法。
其中,直接输入法适用于新的工具坐标系的值已知的场合。
三点法适用于只改变了工具坐标系原点TCP的位置,仅进行了默认工具坐标系平移的场合。即当新的工具相对于默认的坐标系只是TCP位置(即x、Y、z)发生变换,而姿态(即w、P、R)没变时,可通过三点标定法建立新的工具坐标系;或者将工具TCP位置的偏移量直接输入到相应的轴的坐标值里,即可建立新的工具坐标系,如图1所示的搬运机器人和图2所示的涂胶机器人。
六点法适用于工具坐标系原点(TCP)的位置和姿态均改变了,不仅进行了默认工具坐标系平移又进行了旋转的场合。即当TCP和姿态都发生变换时,则需要采用六点法建立新的工具坐标系,如图3所示的喷漆机器人。
在图1中,搬运机器人采用真空吸盘作为搬运工具,它的TCP点设定在吸盘的接触面上。相对于默认的工具坐标,新的工具姿态没变,只是TCP位置在z轴正方向上偏移了L距离。因此,可采用修改z轴的坐标值的方法或三点标定法,建立吸盘工具坐标系。
在图2中,涂胶机器人采用胶枪作为涂胶工具,它的TCP点设定在胶枪底部的端点位置上。相对于默认的工具坐标,新的工具姿态没变,只是TCP位置在x轴、Y轴、z轴三个方向上发生了偏移。因此,可采用修改轴的坐标值的方法或三点标定法,建立涂胶工具坐标系。
在图3中,喷漆机器人采用喷枪作为喷漆工具,它的TCP点设定在喷枪底部的端点位置上。相对于默认的工具坐标,新的工具姿态和TCP位置均发生了变化。因此,需要采用六点标定法,建立喷漆工具坐标系。
3工具坐标系的设置
3.1直接输入法
在FANUC机器人示教器中,直接输入法操作步骤如下:
第一步:切换至坐标系号需设置的“方法”选择界面,其具体操作如下:[MENU](菜单)→[SETUP](设置)→F1[Type](类型)→[Frames]坐标系→F3[0THER](坐标)→[ToolFrame](工具坐标)→选择要设置的坐标系号→F2[DETAIL]详细→F2[METHOD]方法,进入“方法”选择界面。
第二步:选择坐标系的设置方法。在“方法”选择界面中,选择[Direct Entry](直接输入法)→[ENTET]回车确认,进入“直接输入法”界面。
第三步:修改参数。在“直接输入法”界面中,选择并修改要设置的参数→[ENTET]回车确认。
3.2三点法
在FANUC机器人示教器中,三点法操作步骤如下:
第一步:切换至坐标系号需设置的“方法”选择界面,与直接输入法相同。
第二步:选择坐标系的设置方法。在“方法”选择界面中,選择[Three Point](三点法)→[ENTET]回车确认,进入“三点法”界面。
第三步:记录接近点。
a.找基准点:在机器人工作范围内,找一个固定的尖端点作为基准点,如固定在柱子上的笔尖。
b.确定参考点:一般在工具上确定一个参考点,常选择工具中心点TCP,如写字机器人末端执行器安装的毛笔工具笔尖,搬运机器人的真空吸盘。
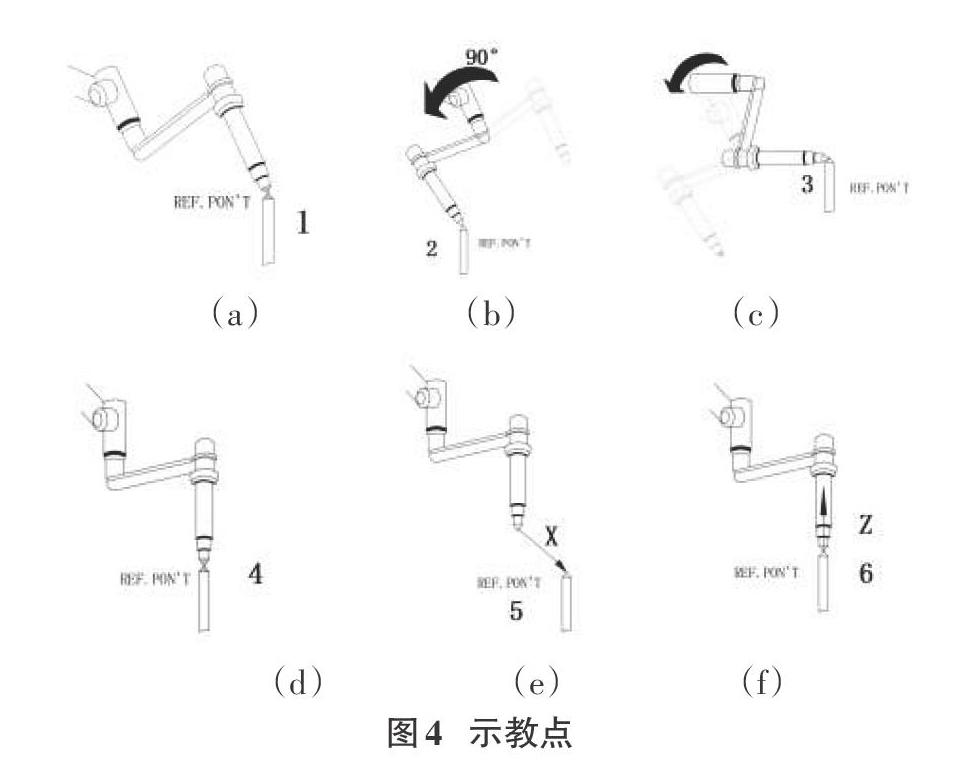
c.示教第一点:用WORLD坐标移动机器人,使工具尖端TCP接触基准点,按[sHIFr]+F5[RECORD]记录位置一,如图4(a)所示。
d.示教第二点:将工具尖端TCP移开基准点,J6轴转动90度,不要超过180度。再用WORLD坐标移动机器人,使得工具TCP接触基准点,记录位置二,如图4(b)所示。
e.示教第三点:将工具尖端TCP移开基准点,J4,J5轴转动不超过90度。再用WORLD坐标移动机器人,使得工具TCP接触基准点,记录位置三,如图4图4(c)所示。
在示教三点的姿态位置时,其姿态位置相差越大,最终获取的TCP精度越高。
f.机器人通过这三个位置点的数据自动计算求得新的工具坐标系TCP的数据,并保存。这样,通过三点法就将TCP成功地从默认位置移动到新工具的中心点。
3.3六点法
在FANUC机器人示教器中,六点法是在三点法的基础上实现的,只是第四点也被称为坐标原点,是让工具的参考点垂直于基准点,如图4(d)所示;第五点是工具参考点从坐标原点向将要设定为TCP的+x方向移动,如图4(e)所示;第六点是工具参考点从坐标原点向将要设定TCP的+z方向移动,如图4(f)所示。这样,机器人通过这六个位置点的数据自动计算求得新的工具坐标系TCP的数据。
4结论
工业机器人在使用之前,必须首先根据末端执行器的类型,选择合理的设置方法,正确的利用示教器进行示教,从而建立新的工具坐标系,为机器人精确的运动控制奠定基础,也为FANUC机器人的学习和使用提供了参考。
猜你喜欢
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中等数学(2017年2期)2017-06-01
科技创新与应用(2016年34期)2016-12-23
汽车科技(2016年6期)2016-12-19
中学生数理化·七年级数学人教版(2016年2期)2016-05-30
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
