基于多连杆的无避让立体停车装置设计
2020-07-11 06:52颜建强刘朝阳陈思远姜志豪任志军
科技与创新 2020年13期
颜建强,刘朝阳,陈思远,姜志豪,任志军
基于多连杆的无避让立体停车装置设计
颜建强,刘朝阳,陈思远,姜志豪,任志军
(湖南师范大学 工程与设计学院,湖南 长沙 410081)
根据当今中国社会私家汽车的数目越来越多,车位的数目相对汽车越来越少而立体车库的技术仍处于发展阶段的情况,在分析已有立体车库的基础上,设计了一款实用性强、拓展性好、停车效率高的多连杆无避让双层立体停车装置。对该装置的结构进行了三维建模,利用MATLAB软件对多连杆进行了设计与计算,并介绍了该停车装置的运动原理与轨道设计原理。
多连杆;无避让立体停车装置;结构设计;轨道设计
随着中国汽车保有量的持续增加,停车位紧张、停车难等现象日渐成为社会问题,为缓解这一现状,国内众多公司及研究机构开始研究设计与制造立体停车设备[1-2]。目前,国内市场上立体停车方式主要分为升降横移式、多层循环式、巷道堆垛式等,这些立体停车方式及设备虽然增加了停车位,但依然没有普及应用。究其原因,主要是因为当前立体车库的建设工程较大、制造与维护成本较高、车辆存取时间较长。因此,研究设计一种成本较低、结构精巧、效率较高的无避让停车装置,具有显著的市场价值与社会效益。
1 整体设计思路
该立体停车装置整体设计为两层式,且能够直接应用于现有的地面停车位,从而实现设备的较高兼容性,使其投入市场较为容易。立体停车装置能实现平移(或旋转)和升降两个动作合一,使上层车位的运动轨迹为弧线型,既实现了无避让停车,也大大缩短了停车时间。为实现上层车板的弧形运动轨迹,链条导轨和空间连杆机构配合工作,链条联接停车装置动力源,驱动上层载车板在空间连杆作用下实现平移和升降,导轨固定上层车位的运动轨迹,多连杆机构的运动必须保持上层车位在运动过程中始终处于水平状态。为了进一步提高车辆存取效率,在该停车装置上增加了旋转结构,使车辆停放更为方便,预计存车、取车时间分别不超过1 min。
产品的三维效果如图1所示。

图1 无避让立体停车装置三维效果图
2 立体停车装置的结构设计
2.1 升降装置设计
该立体停车装置的升降装置主要分为连杆部分和导轨部分。导轨部分的主要作用为为上层载车板的弧线运动提供支撑与导引,使其停放过程不会影响下层车位,通过研究比较发现,采用链条链轮传动的承载能力较大,从而提高了车库的安全系数,传动精度较高,且维护成本较低,是最为适合的传动方式[3]。
连杆部分应用多连杆机构,使上层载车板在升降过程中能够始终保持水平状态,也能够在升降过程中对上层载车板起到分力作用,此功能的实现主要依靠连杆的长度配合和空间限位,形式仿造人类手臂结构设计。根据设计要求采用七连杆机构,其结构如图2所示,各连杆的长度和限位的角度可通过数学建模分析解得。因上层载车板的理想运动轨迹已知,可知在某一时刻载车板上点的位置,将载车板上与连杆的固定点和主支撑杆与水平面的夹角离散,得出在载车板运动∆时,点的具体位置和连杆主支撑杆的角度,再将其一一对应,将各连杆长度和连杆与水平角度的夹角作为设计变量,对其构造目标函数,将杆长约束和角度约束作为目标函数的绝对约束和目标约束,利用MATLAB进行模型求解[4],具体求解过程如下。

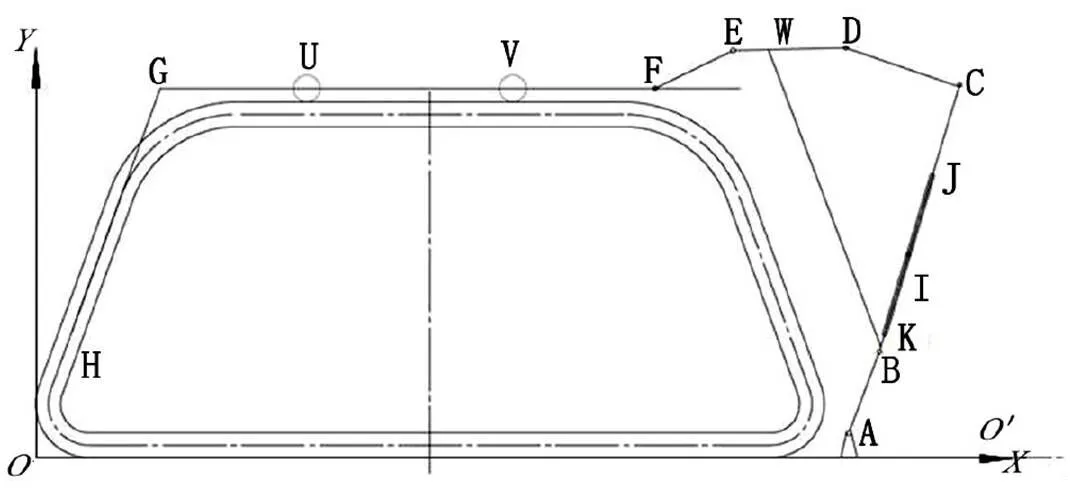
图2 立体停车装置多连杆结构示意图
根据图2所示直角坐标系,以∠HGF的角度变化作为分段条件,将点F在载车板运动过程中分为四个部分:∠HGF=110°,110°<∠HGF<177°,177°<∠HGF<185°,∠HGF=185°,同时将AC,∠O´AF理想对应角度一一对应,求解点F的纵坐标与横坐标的关系式如表1所示。
表1 点F坐标关系表
∠HGFfn(x)x范围αAC∠O´AF 110°f1(x)750≤x≤1 310-UG75°120° 110°~177°f2(x)1 310-UG≤x≤1 420-UG70°90° 177°~185°f3(x)-UG≤x≤1 353-UG60°60° 185°f4(x)1 494-UG≤x≤1 553-UG30°30° 185°f5(x)1 553-UG≤x≤1 6560°0°
n()的表达式如下:
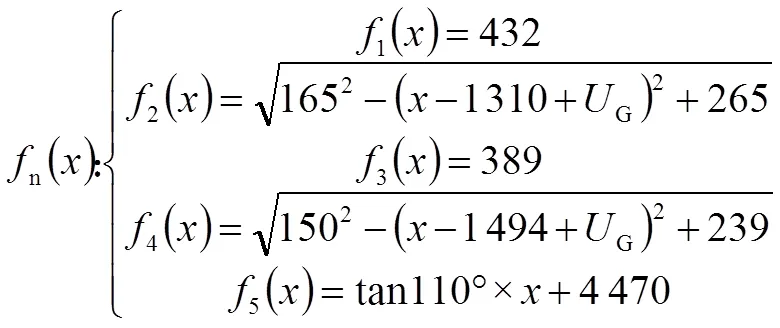
由MATLAB编程获得载车板理想轨迹图,如图3所示。
求得=101.7 mm,取整得100 mm。
将已知的理想轨迹离散为10个不同位置,各个离散位置如图4、表2所示。
建立优化数学模型,确定设计变量为:=[1,2,3,4,5,6,7,8,9,10,11]T=[GF,AC,CD,DE,EF,AC,CD,DE,EF,GH,∠O´AF]T。
根据设计变量和所求目标构造目标函数如下:

xi=AF×cosAF=AF×cos11
yi=AF×sinAF=AF×sin11
AF=1×(sin6+sin11-180°)+2×(sin7+sin11-180°)+
3×(sin8+sin11-180°)+4×(sin9+sin11-180°)+5×
(sin10+ sin11-180°)
sin11=120°+∆AFi
sin6=75°+∆AFi
此目标函数为求出点在规定轨迹下,坐标浮动最小的全局最优解,以杆长条件和角度条件作为该目标函数的约束条件,使用MATLAB进行求解,并对相关条件进行约束[5]。
杆长约束:

角度约束:
利用MATLAB中非线性约束优化函数fmincom进行求解,获得结果。
2.2 旋转机构
该旋转机构是为了使载车板下放后旋转车辆能直接开上载车板设计的。上层车位载车板结构如图5所示。旋转的传动方式利用履带和带轮传动,大带轮和小带轮利用履带进行传动工作,可靠,效率较高,成本较低,结构简单,空间利用率高,还有过载保护的作用[5-6]。载车板的坡度设计使车辆停放更为平稳,不易侧滑。拉线块与引车板通过钢丝线连接,因为钢丝线的长度一定,在旋转的过程中,钢丝线因处于绷紧状态,使引车板可进行一定角度的上拉和下放,防止车辆停放时出现滑落而造成的一系列危险。

图4 上层停车位载车板理想轨迹离散图
表2 理想轨迹离散数据表
离散点SxiSyi∆αACi∠O´AFi 175043200 2850432﹣15﹣25 3950432﹣30﹣40 41 050432﹣40﹣60 51 150432﹣50﹣70 61 250425.078 1﹣55﹣80 71 350389﹣60﹣90 81 450378.154 6﹣65﹣100 91 550211.41﹣70﹣110 101 65063.337 74﹣75﹣120
3 结论
相对而言,基于多连杆的无避让停车装置的性能与结构上有如下特点:兼容性好,可适用于大部分现有停车位的改建,既可单独安装,又可成规模安装,上层停车位载车板旋转装置实现顺时针、逆时针两个方向旋转,车辆存、取更便捷;通过导轨和多连杆结构设计,使上层车位的停车平稳可靠且具有较高的安全性,连杆的优化设计使得车辆的存取时间较短,效率较高;引车板的拉线设计节省了一个动力源电机,节约成本。同时,车辆在上层车位停放时引车板的上翘使得车辆不容易因为一些突发原因滑落而造成伤害,进一步提高了车辆存取时的安全系数。

图5 上层车位载车板结构图
[1]史学磊.立体车库的特点、应用及发展前景[J].建筑资讯,2016(11):60-63.
[2]刘杰,刘楠嶓,吴立辉,等.无避让立体车库整体设计研究[J].现代制造技术与装备,2016(12):91-92.
[3]卢玉明.机械设计基础[M].6版.北京:高等教育出版社,2015.
[4]春雷,潘宏侠,李冉,等.基于Matlab的平面连杆机构仿真软件的研究[J].机械设计与制造,2012(12):94-96.
[5]田培棠,石晓辉,米林.机械零部件结构设计手册[M].北京:国防工业出版社,2011.
[6]张荣.机械原理[M].武汉:华中科技大学出版社,2015.
U491.71
A
10.15913/j.cnki.kjycx.2020.13.004
2095-6835(2020)13-0008-03
颜建强(1979—),男,硕士,工程师,实验室主任,研究方向为数字化制造。
〔编辑:严丽琴〕
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
现代家长(2018年11期)2018-01-05
小学生时代·大嘴英语(2017年1期)2017-03-20
爆笑show(2015年9期)2015-10-24
小朋友·快乐手工(2009年4期)2009-04-28
数学大王·中高年级(2009年3期)2009-04-21