
基于WiFi的设备无关被动式定位技术研究
2020-07-14 08:37朱春华田稼科
现代电子技术 2020年11期
关键词:目标检测
朱春华 田稼科

摘 要: 基于WiFi的被動式定位技术因其不要求目标携带射频标签、定位设备已商用化、定位数据便于获取等优点得到广泛关注。文中综述了现有的基于WiFi的设备无关被动式定位系统,按照定位数据特点和定位实现原理,对比分析了基于接收信号强度(RSS)和基于信道状态信息(CSI)的WiFi定位系统的架构、定位性能和适用性,所得结论可作为定位系统选择的依据。
关键词: 被动式定位; WiFi定位系统; 指纹匹配; 目标检测; 接收信号强度; 定位性能分析; 定位数据获取
中图分类号: TN926?34 文献标识码: A 文章编号: 1004?373X(2020)11?0024?05
Research on device?free passive localization technology based on WiFi
ZHU Chunhua, TIAN Jiake
(College of Information Science and Engineering, Henan University of Technology, Zhengzhou 450001, China)
Abstract: The passive localization technology based on WiFi is widely concerned because it does not require the target to carry the radio frequency tag, the localization equipment has been commercialized, and the localization data is easy to obtain. The existing device?free passive localization systems based on WiFi have been reviewed in this paper. According to the characteristics of the localization data and the localization implementation principle, the two localization systems based on the received signal strength (RSS) and channel state information (CSI) are contrasted and analyzed in the implementation structure, location accuracy and applicability. The results can be used for the selection of the localization systems.
Keywords: passive localization; WiFi positioning system; fingerprint matching; object detection; received signal strength; positioning performance analysis; positioning data acquisition
0 引 言
目标定位在雷达、声纳、无线传感器网络、天线基站等领域应用非常广泛,它也是目标追踪、识别和监测的基础。能够提供室外精准位置服务的全球定位系统[1](Global Positioning System,GPS)和北斗导航定位系统[2](BeiDou Navigation Satellite System,BDS)等技术极为成熟,但其用于室内定位时由于卫星信号受到建筑物阻挡,出现衰减和室内环境复杂多变难以提供高精度的位置信息。近些年射频定位技术因其硬件实现简单、组网灵活、分辨率高等优点成为新的研究热点,若按照目标是否携带射频标签,则可分为主动式定位和被动式定位两大类。文献[3]首次提出了被动式定位的概念,与主动式定位相比,被动式定位不要求待侧目标携带标签,不涉及目标隐私和安全性,具有更为广阔的应用场景。在蓝牙[4](Bluetooth,BT),ZigBee[5],WiFi,射频标签[6](Radio Frequency Indentification,RFID),超宽带无线电[7](UltraWideBand,UWB)等现有的定位技术中,基于WiFi的射频定位技术能够利用现成的IEEE 802.11n标准下的商用无线网卡(如Intel 5300)实现组网,且能够获取精确的接收信号强度(Received Signal Strength,RSS)信息或信道状态信息(channel state information,CSI),从而可在无线网络已大范围覆盖的室内场景中实现目标定位[8]。
本文综述了基于WiFi的射频定位技术的典型系统,依据链路层和物理层定位实现原理,对比分析了基于RSS和基于CSI的WiFi定位系统架构、定位性能和应用场景。
1 基于WiFi的典型被动式定位系统
1.1 基于RSS的WiFi被动式定位
无线信号在室内空间传输时的RSS变化与传输距离存在一定的规律[9],WiFi信号的接收强度用于定位是完全可行的。受限于设备条件和网络协议的发展,国内外学者最早的研究都是基于RSS。早在2000年,微软公司的Bahl等人便利用指纹库匹配技术实现了基于WiFi的RSS主动式定位系统RADAR[10],该系统在1 000 m2的空间能够达到5 m的定位精度,从此WiFi定位技术开始了飞速的发展。
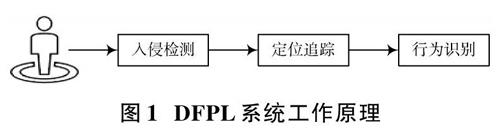
2007年,Moustafa Youssef团队首次提出了在可控环境下基于无线局域网的被动式定位(Device?free Passive Localization,DFPL)的概念,并且详述了DFPL的三大功能,即入侵检测、定位追踪和行为识别。Youssef等人对人体检测模块提出了移动平均和移动方差的算法,对于轨迹追踪模块和行为识别模块提出了基于被动电子地图的概率论匹配算法,并据此论证了设备无关被动定位的可行性。DFPL系统工作原理如图1所示。
在2009年NTM会议上,Youssef团队基于真实环境下RSS的能量级存在一定的波动这一发现,提出真实环境下基于WiFi的DFP检测系统[11]。在原有的DFPL系统检测模块上运用假设检验算法,进一步从时间和空间上研究环境改变对系统精度的影响。以上两项工作奠定了基于WiFi设备无关被动式定位的理论基础和整体框架。
Youssef团队在后续工作中分别研究了基于多目标的DFP系统[12]、基于轻量级的DFP系统[13]和基于大规模的DFP系统[14]。以此为基础,面向大规模WLAN真实环境,提出并设计了基于WiFi的设备无关被动式定位跟踪系统Nuzzer[15],该系统采用指纹库匹配算法,工作分为两大阶段:离线训练阶段和在线定位阶段。在离线训练阶段,不携带任何设备的目标依次站立在不同的测试点,接收端依次记录相对应的RSS值建立指纹库;在在线定位阶段,利用离散空间估计和连续空间估计算法在离散空间和连续空间实现室内人体定位和追踪。离散估计使用最大概率估计输出一个位置坐标;连续估计对离散阶段一系列坐标位置进行空间平均和时间平均来提高定位精度,不同位置的空间目标坐标定义为:
[x=i=1kp(i)?xi=1kp(i)] (1)
式中:[k]是参与定位计算的指纹点的个数;[p(i)]是每个点对应的概率;[x]表示降序排列的指纹点坐标。不同时刻的时间平均坐标定义为:
[xt=i=t-min(w,t)+1tximin(w,t)] (2)
式中:[xi]表示不同時刻的目标坐标;[w]表示平均窗口长度;[t]表示时间段。Nuzzer系统提出的时空平均算法的中位误差达到了1.82 m,相对于传统的贝叶斯算法其精确度提高了38%。
指纹库在构建过程中需要大量的物力财力,且无法适应多变的环境,一旦环境发生改变,就需重新测量建立指纹库。鉴于此,Youssef团队在2014年提出了轻量级的定位追踪系统Ichnaea[16],在静态环境下构建指纹库时不再像以往系统一样,Ichnaea系统对接收的信号强度经过短时间的训练(典型2 min)得到非参数的信号特征。在检测模块中引入RASID[12]设备无关被动人体检测系统的统计异常检测技术,确定是否有用户出现在监控区域,监控区域估计的信号密度定义为:
[fj(x)=1nhji=1nVx-xj,ihj] (3)
式中:[xj,i]和[hj]分别表示第[j]个数据流的采样和带宽;[V]代表核函数;[n]是滑动窗口的个数。检测模块采用高效的Epanechnikov核函数,可表示为:
[V(q)=34(1-q2), q≤10, otherwise] (4)
式中:最优带宽采用Scott正则化方法[17]选取,即[h?j=2.345σjn-0.2],[σj]为[xj,i]的标准差。在检测模块中,对于给定的参数[a],只需检测实际累计分布函数[Fj]是否大于检测阈值[F-1j(a)]即可判断有无目标。定位模块采用粒子滤波算法。对于[t]时刻的数据流[j]来说,给定它的异常分数[aj,t],则粒子[i]当前的权重可定义为:
[zij,t=aj,t?djdAPj,i+dMPj,i] (5)
式中:[dApj,i]和[dMpj,i]分别表示粒子到接收端和发射端的距离;[dj]表示发射端到接收端的距离。根据所有数据流,可以得到粒子[i]的位置即权重最大的位置[zi,t=maxjzij,t],相对于传统的基于电子地图的WiFi定位系统,Ichnaea系统在保证定位精度的同时,节省了大量的人力物力和财力,具有较强的系统抗干扰能力,从而使该系统具有更好的稳定性和普适性。
1.2 从RSS到CSI
室内环境复杂多变,到达接收端的信号往往经过了环境的反射、折射、透射等,RSS作为链路层参数是多条无线路径的能量叠加值,只能描述无线信号在传输过程中的衰减程度,而无法反映室内多径效应的程度。静态环境下接收机1 min接收到的RSS会产生5 dB的波动[18],这将限制系统定位精度和鲁棒性的提升。在IEEE 802.11系列协议中,WiFi引入正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)技术,将传输信道划分为若干个更加细粒度的子信道,将传输信息放到多个子载波[fk]上传输,接收端能够记录到达接收端所有子载波的振幅和相位,记作CSI。国内外学者最初只能采用价格昂贵的软件无线电(Universal Software Radio PeriPheral,USRP)来记录CSI,例如,著名的穿墙检测系统WiVi[19],随着CSI?tool[20]技术的提出,WiFi环境下廉价的商用设备使得CSI的广泛应用成为了可能。
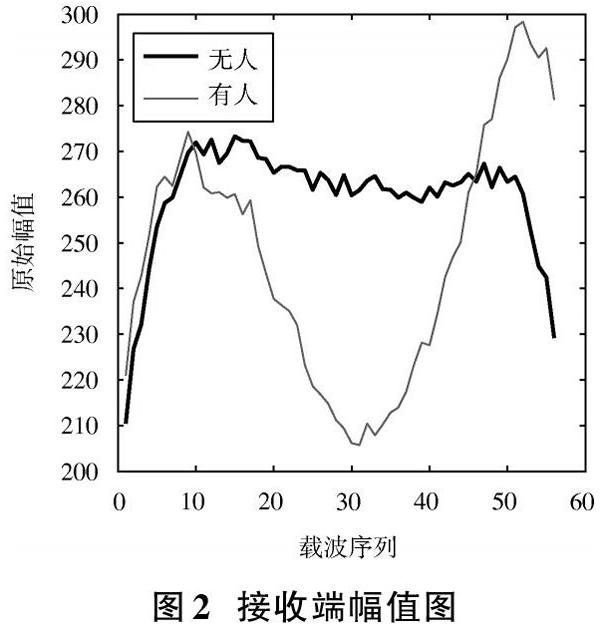
射频节点接收到的CSI信号可表示为[H(fk)=H(fk)eisin(∠H(fk))],其中,[H(fk)]是频率为[fk]的第[k]个子载波的CSI,[H(fk)]和[∠H(fk)]分别代表第[k]个子载波的幅度和相位。以高通的AR9580NIC网卡为例,有无探测目标时,射频节点接收端接收到的CSI信号幅值和相位分别如图2和图3所示。
为了应对当前频谱资源匮乏的问题,IEEE 802.11n协议引入了多输入多输出(Multiple Input Multiple Output,MIMO)技术。MIMO技术在保证带宽和传输功率一定的情况下,通过增加接收端和发射端的天线数目来提高数据吞吐量和传输距离。MIMO系统中发射端和接收端每一对天线都可以看作是一个数据流,假设发射端和接收端分别有[M]和[N]根天线,数据流数目为[M×N],所有数据流的CSI信息可表示为:
[H=H11H12…H1MH21H22…H2M????HN1HN2…HNM] (6)
CSI在一定程度上抑制了多径效应,而且其携带的幅度和相位信息更为丰富。基于CSI的WiFi被动式定位技术领域的成果不断涌现,室内定位的精确度和普适性都得到了较大的改善。
1.3 基于CSI的WiFi被动式定位
文献[21]提出了基于CSI的被动式定位系统Pilot,Pilot系统分为两大阶段:离线训练阶段和在线定位阶段。离线训练阶段,Pilot系统以静态环境下数据包的自相关函数的均值[CiNor]为特征建立指纹库,把异常环境下数据包的互相关函数的均值[CiAbn]作为“触发器”,分别定义为:
[CiNor=1nj=1ncorr(HiNor,HjNor)] (7)
[CiAbn=1nj=1ncorr(HjNor,HiAbn)] (8)
式中:[n]是数据包个数;[HiNor]代表离线训练阶段第[i]个数据包的CSI集合;[HiAbn]代表检测阶段的第[i]个数据包的CSI集合。
在线定位阶段,系统时刻运行人体检测模块,Pilot系统借助于RASID系统实现轻量级的基于CSI的被动人体检测。当确定存在目标,需要启动定位模块时,Pilot系统利用概率算法将检测到的异常数据与指纹库进行对比,从而感知目标所在的位置。实验结果表明,在相同的实验环境下,Pilot系统的异常检测性能优于RASID,定位精度相比于Nuzzer系统提升6%。
虽然被动式定位已经得到了较快的发展,但大部分系统都要求监控区域设置一定数量的发射机?接收机对,而家庭场景中发射机?接收机对较少,甚至只有一个接入点。针对该问题,Yourssef团队在WCNC 2013会议上提出了精确的基于单流的被动式MonoPHY[22]定位系统。MonoPHY系统采用一对发射?接收机,利用指纹匹配的方法实现目标定位。MonoPHY记录目标位于不同位置的CSI,经过长时间的实验观察,在测试位置每个载波的CSI值都呈现出分簇现象,且分簇数最多不超过3个,据此每簇都可以建立高斯分布模型用于定位计算。此外,MonoPHY系统还引入MIMO技术和OFDM技术增加定位精度。假设在测试空间,发射端有[n]根天线,接收端有[m]根天线,则在只有一对发射?接收机的情况下存在[n×m]条天线对,发射端采用OFDM调制技术在[f]个子载波上传输数据包。这样在监控区域就存在[n×m×f]条数据链路。一个链路对应一个子载波,其到达接收端都具有不同的幅值和相位。MonoPHY主要采用幅值信息,在离线训练阶段,MonoPHY采用[k]均值将每条数据流最多划分为3个簇,同时采用高斯混合模型建立指纹库;在在线定位阶段,采用最大化后验概率算法对测试对象进行定位。实验结果表明,MonoPHY系统可以达到1.36 m的中位距离误差,比Nuzzer系统提高了48.1%。
在MonoPHY系统中,每个位置上每个簇的子载波携带的CSI幅值信息都可以用高斯混合建模,但相邻位置的CSI文件高度重合以及数据处理阶段[k]均值算法带来的平滑效应降低了定位精度。针对这一问题,Yourssef团队提出基于单流的WiFi被动式定位系统MonoStream[23]。MonoStream系统将定位问题建模为一个目标识别问题,在离线训练阶段,它将不同位置上的CSI信息建模为不同图像,并采用联合boosting技术降低算法运算时间,提取一系列的特征值,在在线定位阶段采用离散空间估计和连续空间估计的方法。实验结果表明,相比MonoPHY系统,MonoStream系统获得了0.95 m的中位误差,定位精度提升了26%,且运行时间小于23 ms,更加适合实时监测。
以上基于CSI的WiFi被动式定位技术都采用幅值信息,而忽略了更加敏感的相位信息。鑒于此,在2014年清华大学的刘云浩团队第一次提出了基于幅度和相位的PADS[24]检测系统。PADS系统在数据处理阶段采用相位线性变化来消除定时偏移和信号噪声,采用Hampel滤波器来降低孤立值带来的较大波动;在特征提取阶段不再采用与信号功率有关的方差特征。PADS系统利用一种与环境变换无关的归一化幅值协方差和相位协方差矩阵;且采用支持向量机实现目标检测。实验结果表明,PADS系统在引入相位信息之后性能有一定的提升,证明了相位信息的有效性。文献[24]也表明,CSI中的相位信息与目标关系的探明将是未来的研究重点。当前的天线设备和带宽限制了CSI系统精度的进一步提升,文献[25?27]将CSI信息与传统定位系统采用的RSS信息等的多信息多技术融合将能够进一步提升定位系统的性能,未来混合信息和技术的研究也将推动CSI系统的应用。
1.4 对比分析
对现有的典型被动式定位系统对比分析结果如表1~表3所示。
由表1~表3可以看出:当前的WiFi被动式定位系统基本使用指纹匹配的方法;当今的WiFi被动式定位系统的发展主流是使用含有更多信息的CSI;基于CSI的WiFi被动式定位系统大多采用易于处理的幅值信息。
2 结 论
本文对比分析了基于RSS的WiFi被动式定位技术和基于CSI的WiFi被动式定位技术及其典型的实现架构。分析结果表明,与基于RSS的系统相比,基于CSI的系统能够更加细粒度地描述无线信道,系统具有更高的精确度和鲁棒性。CSI中的相位信息与目标关系的探明以及CSI信息与RSS信息的特征融合和定位系统的融合将是未来射频探测技术研究的方向。
参考文献
[1] HSU L T. Analysis and modeling GPS NLOS effect in highly urbanized area [J]. GPS solutions, 2018, 22(7): 1?12.
[2] YANG Yuanxi, XU Yangyin, LI Jinlong, et al. Progress and performance evaluation of BeiDou global navigation satellite system: data analysis based on BDS?3 demonstration system [J]. Science China earth sciences, 2018, 61(5): 614?624.
[3] YOUSSEF M, MAH M, AGRAWALA A K. Challenges: device?free passive localization for wireless [C]// Proceedings of the 13th Annual International Conference on Mobile Computing and Networking. Montreal, Quebec, Canada: ACM, 2007: 222?229.
[4] HAARTSEN J C. The Bluetooth radio system [J]. IEEE personal communications, 2000, 7(1): 28?36.
[5] FANG S H, WANG C H, HUANG T Y, et al. An enhanced ZigBee indoor positioning system with an ensemble approach [J]. IEEE communications letters, 2012, 16(4): 564?567.
[6] MONTASER A, MOSELHI O. RFID indoor location identification for construction projects [J]. Automation in construction, 2014, 39: 167?179.
[7] YU K, MONTILLET J P, RABBACHIN A, et al. UWB location and tracking for wireless embedded networks [J]. Signal processing, 2006, 86(9): 2153?2171.
[8] WANG Yan, LIU Jian, CHEN Yingying, et al. E?eyes: device?free location?oriented activity identification using fine?grained WiFi signatures [EB/OL]. [2016?05?11]. http://www.doc88.com/p?0116903478276.html.
[9] HAFEZI P, NIX A, BEACH M A. An experimental investigation of the impact of human shadowing on temporal variation of broadband indoor radio channel characteristics and system performance [C]// Vehicular Technology Conference Fall 2000. Boston, MA, USA: IEEE, 2000: 37?42.
[10] BAHL P, PADMANABHAN V N. RADAR: an in?building RF?based user location and tracking system [C]// Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies. Tel Aviv, Israel: IEEE, 2000: 775?784.
[11] MOUSSA M, YOUSSEF M. Smart devices for smart environments: device?free passive detection in real environments [C]// IEEE International Conference on Pervasive Computing & Communications. Galveston, TX, USA: IEEE, 2009: 1?6.
[12] SABEK I, YOUSSEF M. Multi?entity device?free WLAN localization [C]// 2012 Global Communications Conference. Anaheim, CA, USA: IEEE, 2013: 2018?2023.
[13] KOSBA A E, SAEED A, YOUSSEF M. RASID: a robust WLAN device?free passive motion detection system [C]// 2012 IEEE International Conference on Pervasive Computing and Communications. Lugano, Switzerland: IEEE, 2011: 180?189.
[14] SEIFELDIN M, YOUSSEF M. A deterministic large?scale device?free passive localization system for wireless environments [C]// Proceedings of the 3rd International Conference on Pervasive Technologies Related to Assistive Environments. Samos, Greece: ACM, 2010: 51?58.
[15] SEIFELDIN M, SAEED A, KOSBA A E, et al. Nuzzer: a large?scale device?free passive localization system for wireless environments [J]. IEEE transactions on mobile computing, 2013, 12(7): 1321?1334.
[16] SAEED A, KOSBA A E, YOUSSEF M. Ichnaea: a low?overhead robust WLAN device?free passive localization system [J]. IEEE journal of selected topics in signal processing, 2014, 8(1): 5?15.
[17] EPANECHNIKOV V A. Non?parametric estimation of a multivariate probability density [J]. Theory of probability and its applications, 1969, 14: 153?158.
[18] WU K, XIAO J, YI Y, et al. FILA: fine?grained indoor localization [C]// Proceedings of 2012 IEEE INFOCOM. Orlando, FL, USA: IEEE, 2012: 2210?2218.
[19] ADIB F, KATABI D. See through walls with WiFi [EB/OL]. [[2017?03?09]]. https://wenku.baidu.com/view/24664404a22 d7375a417866fb84ae45c3b35c22b.html.
[20] HALPERIN D, HU W, SHETH A, et al. Predictable 802.11 packet delivery from wireless channel measurements [J]. ACM SIGCOMM computer communication review, 2010, 40(4): 159?170.
[21] XIAO J, WU K, YI Y, et al. Pilot: passive device?free indoor localization using channel state information [C]// 2013 IEEE 33rd International Conference on Distributed Computing Systems. Philadelphia, PA, USA: IEEE, 2013: 236?245.
[22] ABDEL?NASSER H, SAMIR R, SABEK I, et al. MonoPHY: mono?stream?based device?free WLAN localization via physical layer information [C]// IEEE Wireless Communications and Networking Conference (WCNC 2013). Shanghai, China: IEEE, 2013: 4546?4551.
[23] SABEK I, YOUSSEF M. MonoStream: a minimal?hardware high accuracy device?free WLAN localization system [EB/OL]. [2013?08?04]. https://www.arxiv.org/abs/1308.0768.
[24] QIAN K, WU C, YANG Z, et al. PADS: passive detection of moving targets with dynamic speed using PHY layer information [C]// 2014 20th IEEE International Conference on Parallel and Distributed Systems (ICPADS). Hsinchu, Taiwan, China: IEEE, 2014: 1?8.
[25] SUN C, GAO F, LIU H, et al. A radio tomographic imaging method using channel state information and image fusion [C]// 2018 8th International Conference on Electronics Information and Emergency Communication (ICEIEC). Beijing, China: IEEE, 2018: 223?227.
[26] CHOI J S, LEE W H, LEE J H, et al. Deep learning based NLOS identification with commodity WLAN devices [J]. IEEE transactions on vehicular technology, 2018, 67(4): 3295?3303.
[27] HUANG X, GUO S, YAN W, et al. A fine?grained indoor fingerprinting localization based on magnetic field strength and channel state information [J]. Pervasive & mobile computing, 2017, 41: 150?165.
猜你喜欢
科技创新与应用(2016年36期)2017-02-21
软件(2016年4期)2017-01-20
科教导刊·电子版(2016年28期)2017-01-10
科学与财富(2016年28期)2016-10-14
电脑知识与技术(2016年5期)2016-04-14
科技视界(2016年4期)2016-02-22
哈尔滨理工大学学报(2015年5期)2016-01-19
湖南大学学报·自然科学版(2015年10期)2015-11-30
软件导刊(2015年1期)2015-03-02
