
水黾仿生特性与工程应用研究进展
2020-07-14 05:12闫征王立新潘盼
河北科技大学学报 2020年3期
关键词:仿生学
闫征 王立新 潘盼
摘 要:水黽是一种在湖泊、池塘、湿地中常见的小型昆虫,凭借其腿部具有微纳复合结构而呈现的超疏水特性可稳定站立在水面,受到普遍关注并逐步成为研究热点。已有学者对水黾运动特性开展研究,以期获取设计灵感用以研制功能优异的超疏水表面与功能完善的仿生水黾机器人。从水黾运动特性入手,综述了运动支撑力的测试方法,重点关注以水黾为仿生原型在工程仿生领域中超疏水表面制备、水上行走机器人和跳跃机器人研制的发展现状。超疏水表面的制备应从微形貌特征、制备工艺和生产成本等方面深入研究,仿生水黾机器人的研制需进一步考虑运动、驱动方式和支撑特性。基于水黾腿部微形貌结构特征研制超疏水功效显著且持久的超疏水表面,以及性能优异、功能完备、运动特性高度相似的仿生水黾机器人将是未来发展的主要趋势。
关键词:仿生学;水黾;接触力;运动特性;超疏水表面;仿生水黾机器人
中图分类号:TB17 文献标识码:A
doi:10.7535/hbkd.2020yx03002
收稿日期:2020-05-16;修回日期:2020-05-31;责任编辑:冯 民
基金项目:国家自然科学基金(51205107);河北省自然科学基金(E2019208306);河北省高等学校青年拔尖人才资助项目(BJ2017011)
第一作者简介:闫 征(1996—),男,河北石家庄人,硕士研究生,主要从事仿生原型测试技术方面的研究。
通讯作者:王立新副教授。E-mail: wanglx@hebust.edu.cn
Research progress of water strider in bionic
characteristic and engineering application
YAN Zheng, WANG Lixin, PAN Pan
(School of Mechanical Engineering, Hebei University of Science and Technology, Shijiazhuang, Hebei 050018, China)
Abstract:
The water strider is a small insect in lakes, ponds, and wetlands, which can stand stably on water because of the excellent superhydrophobic property of legs that comes from the composite micro-nano structure. This feature has attracted numerous studies and become a research hopspot gradually. Scholars have conducted the investigation on the locomotion characteristic of water strider in order to acquire design inspirations to develop superhydrophobic surface and bionic water strider robots. Starting from the locomotion characteristic of water strider, this paper summarized the testing methods of water strider′s locomotion force, and focused on the development of superhydrophobic surface preparation and water walking or jumping robots in the engineering bionic field. The preparation of superhydrophobic surface should be lucubrated in the aspects of micro-morphological characteristic, preparation process and production cost, and the development of bionic strider robots needs to be considered in terms of the motion, driving mode and supporting characteristic. It will be the main trend in the future to develop superhydrophobic surface with remarkable and lasting efficacy and bionic water strider robots with excellent performance, complete function and highly similar motion characteristic, based on the micro-morphological structure characteristic of water strider leg.
Keywords:
bionics; water strider; contact force; locomotion characteristic; superhydrophobic surface; bionic water strider robot
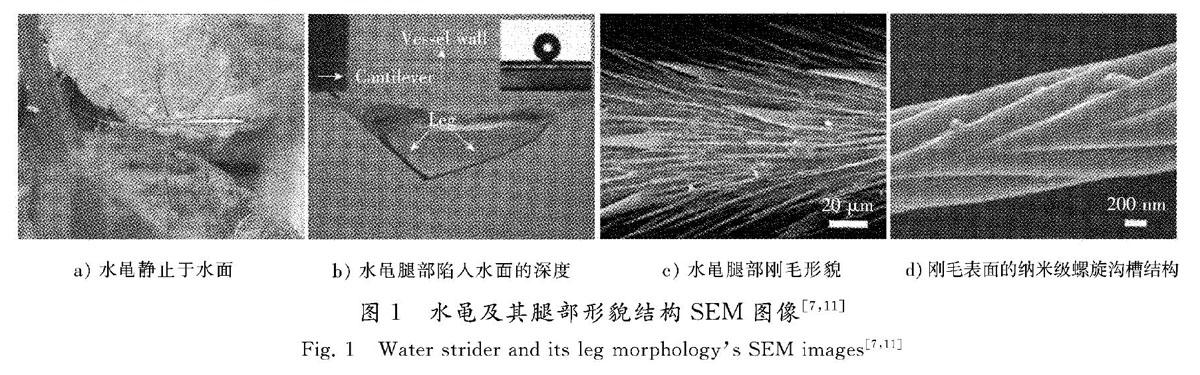
生物在经历数百万年的自然进化后逐步获得了适应栖息环境的生存能力[1],这源于身体结构与运动特性有了巨大的适应性改变[2]。可以利用生物进化而来的结构与功能来服务人类,即根据生物特有的功能特性与结构特征来解决复杂工程问题[3-6]。水黾(见图1 a))隶属昆虫纲黾蝽科,其腿部具有的超疏水特性能够通过排斥水来获取运动支撑力,可在水面静止不动而不掉入水中,还可在水面快速奔跑而不被水浸湿。水黾因具有在水面快速移动、高速爬行的运动特征,吸引了众多学者对其开展运动特征、超疏水特性等方面的研究。水黾腿部产生的水涡深度为(4.38±0.02)mm(见图1 b)),分布着大量长度为50 μm、直径小于3 μm的刚毛结构(见图1 c)),并且单根刚毛呈现螺旋形貌(见图1 d)),微米级刚毛结构能够蓄留空气,从而形成稳固的液-气-固接触界面,以此呈现超疏水特性[7]。水黾运动特征包括噪声小、超疏水性能优异和对水面破坏力小等,可将其应用于海洋勘探、输油管道泄漏检测和超疏水表面研制等方面[8-9],而且水黾腿部的超疏水特性在船舰疏水减阻方面也具有显著的应用价值[10]。本文综述了水黾腿部的运动特性、运动支撑力测量方法,以及其作为仿生原型研制超疏水表面、仿生水黾机器人等方面的研究进展,并对其在仿生工程领域的发展前景与仍需要关注的方面进行分析。
1 水黾生物学特性与运动特性
1.1 水黾身体结构功能特性
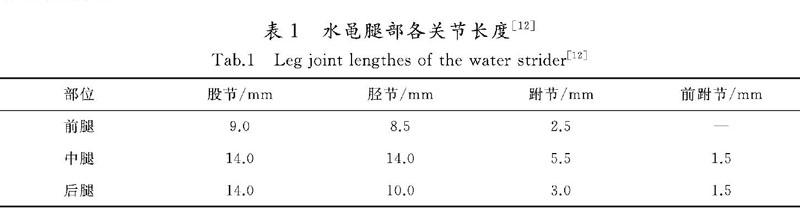
水黾的运动系统包括前腿、中腿和后腿,腿部关节包括前跗节、胫节、股节和基节[12]。水黾腿部具有较强的柔韧性,在支撑自身体重方面发挥重要作用[12-15]。水黾可自由调节关节配置,达到稳定划行、高效跳跃的需求[16]。采用三维激光扫描仪对水黾腹部的形貌结构进行曲面重构,分析获知其腹部漏斗式结构可在顺风时提高划行速度,而在逆风时利于水黾稳定划行,还可促使其腿部迅速排水,避免被卷入水花中[17],这为研制具有优良形态结构的仿生水黾机器人提供了仿生灵感。水黾体长为2 cm,体重为0.01 g,腿部截面直径为0.1 mm,腿部各关节长度如表1所示。按照水黾腿部各关节的结构比例,确保研制出符合水黾生物特性的仿生水黾机器人。
1.2 水黾运动功能特性
水黾在水面具有快速移动和跳跃功能,最初认为水黾因具有腿部分泌的蜡状物质使其稳定划行[18-20]。GAO等[11]研究发现水黾单腿的排水体积是其腿部体积的300倍,单腿可产生1.52 mN的支撑力,约为自身质量的15倍;水黾腿部刚毛表面分布大量的纳米级螺旋沟槽结构,据此呈现优异的超疏水特性,使自身能稳定站立、划行与跳跃。为研究水黾运动特性,利用高速摄像机采集未处理腿、去除前腿、去除中腿和去除后腿的运动数据,据此分析水黾腿部的运动功能特性,即前腿与水面接触来维持身体平衡,中腿进行划动来提供稳定动力,后腿和前腿配合保持平衡并与中腿配合以减少划行阻力[21]。获知水黾腿部的运动功能特性,可为以水黾为仿生原型研制仿生水黾机器人提供理论基础。
水黾腿部与水面呈平行状态,可增加水面浮力以确保其稳定站立[22]。水黾站立、划行、跳跃时,其腿部与水面产生水涡,以获取向前运动的推动力。更为强劲推动力的获得,要以更大加速度向前推进,以此产生更多的水涡体积。水黾的快速运动源于其腿部与水面产生的水涡反作用力,这为研制水涡式仿生水黾机器人提供了设计灵感。研究发现,水黾跳跃后会在下落前向内弯曲腿尖以实现与水面的稳定接触,水黾与水面的接触力刚好低于打破水面的临界力[23],这种调整身体下落姿势与水面安全接触的技能源于自然进化产生的环境适应能力。学者发现,水黾在紧急状况下会主动调整腿部的旋转速度,使起跳速度和跳跃高度达到峰值,以躲避被捕食的危险[24]。水黾腿部的超疏水特性、微纳复合结构和特殊运动特征,为以水黾为仿生原型研制工程仿生应用技术提供了重要思路。
2 水黾运动力测试
已有学者开展了水黾腿部产生的毫-微牛级支撑力测试研究,以表征使水黾稳定站立于水面的运动支撑力。清华大学田煜团队采用阴影提取法观测水黾腿部与水面接触产生的阴影面积来计算获取运动支撑力,重建水黾腿部水涡模型以计算获取相应的支撑力,发现最大水涡深度较小时其与最大支撑力不成正比,水黽在抬腿时的水涡深度为0.02~0.09 mm,此时支撑力为0.3~1.0 N[25-26]。该结果可定量揭示水黾运动机理,为研制性能优异的仿生水黾机器人提供理论指导。有的学者通过观测水黾6条腿的运动阴影图,发现水黾在约0.15 s内完成推进过程且后腿控制其运动速度和运动方向[27],该结果深入阐述了水黾腿部的运动规律和运动特性。水黾依靠水面产生的支撑力使其呈现奇特的运动特性,采用阴影提取法测试该运动支撑力为研制仿生水黾机器人提供了理论基础。
南京航空航天大学戴振东团队已研制多量程三维力传感器来测试动物的运动接触反力,研究发现水黾在水面的划行力为0.87~1.32 mN,且单位腿长的划行力为0.3~0.4 mN/cm,划行力与自身体重成正比;该团队深入研究发现,水黾依靠水面安全裕度来保证自身不会陷入水花[28]。有的学者采用动态力传感器测定不同提升速度下水黾腿部离开水面的附着力,结果显示,提升速度由0.02 m/s上升至0.40 m/s时会导致附着力下降。此结果表明水黾腿部的微纳复合结构是其呈现奇特运动特性的关键因素[29],这为仿生水黾机器人研制提供理论支撑。
水黾腿部由微米级刚毛与刚毛表面的纳米级螺旋沟槽构成的微纳复合结构对其奇特运动特性发挥关键作用。学者已开展水黾腿部脱离水面的力学研究[30],通过PVDF压电材料传感器来测量脱离力,为0.31 μN。亦有学者利用扫描电镜观测水黾腿部的微形貌结构来建立脱水模型进而分析获取脱离力,结果显示水黾提升速度从0.01 m/s增加至0.30 m/s时,其腿部脱离力从0.10 μN急剧下降到0.03 μN,提升速度增加导致其腿部脱离力下降,因此水黾快速移动不会产生较大的逆水阻力[31]。
3 水黾腿部超疏水特性及仿生应用研究
3.1 超疏水表面制备
超疏水表面是指与水滴接触角大于150°且滚动角小于10°的表面[32]。自然界中很多动植物体表面都具有显著的超疏水特性与自清洁功能,水黾腿部、蝉翼、蝴蝶翅膀、荷叶、猪笼草滑移区、水稻叶片等动植物体表的微纳复合结构均呈现显著的超疏水特性[33-34]。超疏水表面应用于仿生水黾机器人研制,与普通材料相比能够减少30%的黏滞阻力,可显著增加仿生水黾机器人的浮力并降低划行阻力[35]。以动植物体表的超疏水特性为仿生原型研制超疏水表面,在自清洁、防腐蚀、流体减阻、微量液滴无损运输、防雾抑冰等方面有着广阔的应用前景[36-40]。
YOUNG[41]提出了水滴在光滑固体表面的接触角概念,即固-液-气交点处与水滴作切线和固-液界线的夹角,用符号θ表示,把θ>150°的固体表面称为超疏水表面。根据超疏水理论可知,固体表面的超疏水性能由表面粗糙结构与表面自由能2个因素决定,以此实现超疏水表面制备[42]。超疏水表面制备的方法主要有静电纺丝法、刻蚀法、溶胶-凝胶法、模板法、3D打印法等[43]。目前超疏水表面制备仍存在因微形貌结构易遭到破坏而导致超疏水功能失效、制备工艺复杂和生产成本高等问题[44-45]。
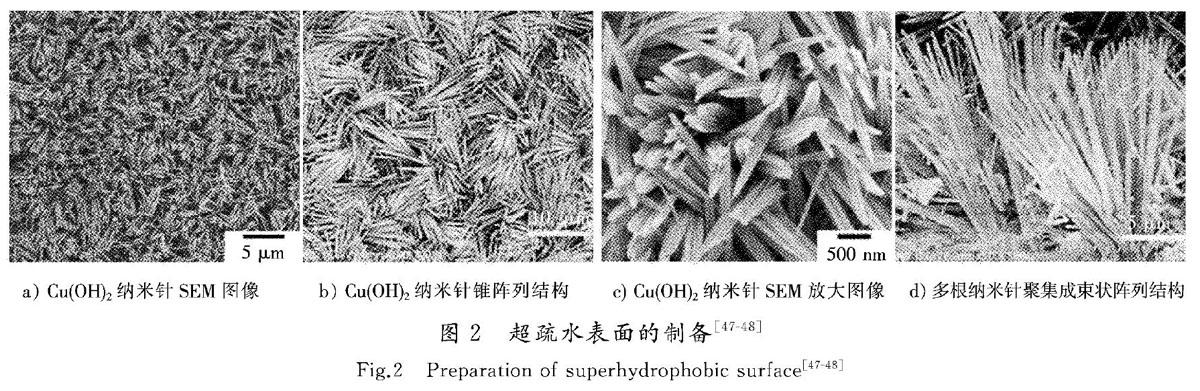
基于上述背景,水黾腿部表现出的超疏水特性引起广泛关注,并逐步成为仿生原型,用以研制超疏水表面。已有学者在铜基金属表面上修饰低表面能物质,制备出仿水黾腿部微纳复合形貌结构的超疏水表面,接触角可达154°,计算得到仿生水黾模型4条腿的最大承载力为11.8 mN,可为水面微型设备的承载受力设计提供理论依据[46]。采用化学浸泡法在铜基金属表面制备出具有沟槽形貌结构的Cu(OH)2纳米针阵列(见图2 a)、图2 c)),呈现出较高的接触角并可使水滴轻易脱离,该超疏水表面具有优异的抗压稳定性,以及显著功效持久性与防水性能,有助于设计出坚固的防水材料和具有撞击稳定性的非黏超疏水表面,为以水黾为仿生原型研制超疏水表面提供了技术基础[47]。通过恒电流电沉积法在铜基金属表面构建出Cu(OH)2纳米針锥结构(见图2 b)、图2 d)),其侧面棱槽可有效保证超疏水表面的非黏附功效,水滴在掉落至表面时会产生弹跳,直至离开样品表面,弹起瞬间水滴与表面不会产生明显拖曳。该制备方法简单易实现,具有操作简便、制备周期短、成本低廉和可用于大面积制备等优点,为后续研制抗结冰、抗结霜非黏超疏水表面提供了基础[48]。近年来,超疏水材料研究已取得较大的进展,但仍存在工艺繁琐、生产效率差和改性材料力学性能低等问题,后续研究应关注修饰材料表面,改变表面微纳米结构的分布,甚至对其微纳米结构重新组合以提升超疏水表面性能[49]。
3.2 仿生水黾机器人研制
仿生水黾机器人的2大功能特征为通用性和适应性,通用性指其在可变环境中实现复杂功能来服务于人类,适应性指其拥有程序判断、识别具体环境的能力[50]。仿生水黾机器人腿部第2关节长度与总长度的比例合理性可提高仿生水黾机器人的运动稳定性,并能获得更大推进力。仿生水黾机器人可用于海上救援、水面环境监测等方面[51]。
BUSH团队研制出世界首款仿生水黾机器人,采用塑料材质的弹性元件提供动力,腿部材料为经过超疏水处理后的不锈钢丝(见图3 a)),质量仅为0.35 g,其在水面的运动速度可达18 cm/s,为后续仿生水黾机器人研制奠定了基础,但存在负载能力差、驱动性能低和无法实现远距离操控等不足[52]。清华大学吴立成团队研制出“Water Dancer”仿生水黾机器人(见图3 b)),该机器人重约2 g且腿部材料为直径0.2 mm的超疏水不锈钢丝, 8条支撑腿和2条驱动腿位于同水平面上,采用直流电机驱动三级齿轮机构提供动力[53]。该团队随
后研制出“Water DancerⅡ”仿生水黾机器人(见图3 c)),采用双电机驱动其10条支撑腿和2条驱动腿,总重约6 g,在水面的运动速度可达20 cm/s,十字架驱动腿结构可使腿部旋转以产生更大推进力[54]。近期,新型仿生水黾机器人已被研制(见图3 d)),质量为21.75 g,在水面的运动速度可达7.15 cm/s,由4条支撑腿和2条驱动腿组成,且每条支撑腿与3个同心圆环相连接,可使其在水面站立更加稳定[55]。未来仿生水黾机器人研究的方向应重点关注驱动方式、运动稳定性等方面。
为提高划水效率,有学者设计出凸轮连杆机构型仿生水黾机器人(见图4 a)),质量为3.9 g,在水面的运动速度可达16 cm/s,通过模拟水黾腿部运动模式而显著提高划水效率,此外还具有运转灵活的运动特性[11]。河北工业大学高铁红团队研制出以泡沫作为腿部材料并以电磁进行驱动的仿生水黾机器人(见图4 b)),分布有4条支撑腿和2条驱动腿,总重为95.1 g,在水面的运动速度可达15 cm/s,具有结构简单、控制灵活、负载能力强等优点[56]。
仿生水黾机器人处于水面环境,要求其具备高稳定性、适应风浪、实时调整运动模式的能力。根据上述需求,有学者研制出依靠表面张力进行漂浮的仿生水黾机器人,腿部材料为经过超疏水处理的螺旋状空心铜丝,采用电机驱动划行(见图5 a)),测试发现该水黾机器人可维持自身平衡以保证稳定运动[57]。亦有学者研制出可在不稳定水面环境中通过调整自身状态而趋于运动平稳的仿生水黾机器人(见图5 b)),质量为439 g,腿部材料为中空椭球,水面平静时位于中空椭球上部的V型弹簧钢紧绷,使椭球形长轴与水平方向平行以降低划水阻力,波浪环境下V型弹簧钢产生松弛现象以提升自身平衡特性[50]。仿生水黾机器人还应从腿部材料特性方面进行研究,以往采用刚性腿而没有考虑使用柔性腿,水黾腿部特有的柔性特征是其运动自如的重要因素,也是其呈现高划水效率的关键。
合适的腿部材料是仿生水黾机器人高效运动的关键。研究人员将柔性腿代替刚性腿研制出质量仅为0.165 g、在水面的运动速度高达15 cm/s的仿生水黾机器人,采用压电弯曲致动器驱动,由四杆传动机构、挥动翼和弹力腿组成(见图6 a)),驱动腿材料具有显著的柔性特征[58]。随后研制出垂直跳跃型仿生水黾机器人(见图6 b)),依靠记忆合金弹簧驱动实现垂直跳跃,质量轻至0.068 g,其垂直跳跃距离可达14.2 cm,能够实现远大于其自身尺寸的垂直跳跃[59],这为研制性能优异的跳跃式仿生水黾机器人开创了先例。水黾腿部的柔性特征可提高其划水效率和负载能力,而仿生水黾机器人柔性腿结构设计、腿部变形问题和疏水材料选择等方面还需深入研究,以优化其运动特性、驱动方式和支撑结构,实现研制性能优异、负载能力强、划水效率高和运动稳定性高的仿生水黾机器人的目标。
4 结 语
源于自然进化,水上昆虫水黾因腿部微纳复合结构而呈现出优异的超疏水特性,具有能够在水面稳定站立、划行、跳跃等运动特性。科研人员利用三维力传感器、压电材料传感器与阴影提取法测试水黾在水面产生的接触力、脱离力和支撑力,依据水黾腿部超疏水特性和运动特征,开展了超疏水表面和仿生水黾机器人的研制,通过化学沉积法和电沉积法制备出了仿水黾腿部微纳形貌结构的超疏水表面。研制出了运动性能优异的仿生水黾机器人,并对其支撑特性、驱动特性、稳定特性和柔性腿驱动特性等方面进行了深入研究。仿生水黾机器人可用于海面救援、水面环境监测、管道液体泄漏检测等工程领域。本研究可加深学者对水黾在工程仿生方面应用的认知,有助于推动以水黾为仿生原型研制超疏水表面与仿生水黾机器人这一应用技术的发展。
参考文献/References:
[1] DICKINSON M. Bionics: Biological insight into mechanical design[J]. Proc Natl Acad Sci Usa,1999,96(25): 14208-14209.
[2] 任露泉,梁云虹. 耦合仿生学[M]. 北京:科学出版社,2012.
[3] 杜家纬. 生命科学与仿生学[J]. 生命科学,2004,16(5): 317-323.
DU Jiawei. Life science and bionics[J]. Chinese Bulletin of Life Sciences,2004,16(5): 317-323.
[4] 路甬祥. 仿生学的科学意义与前沿: 仿生学的意义与发展[J]. 科学中国人,2004,12(4): 22-24.
LU Yongxiang. The scientific significance and frontier of bionics: Significance and development of bionics[J]. Scientific Chinese, 2004,12(4): 22-24.
[5] 毕语涵,孙刚,房岩. 生物表面的疏水自洁研究[J]. 中兽医学杂志,2015,59(9): 76-77.
BI Yuhan,SUN Gang,FANG Yan. The research on hydrophobic self-cleaning of biological surface[J]. Chinese Journal of Traditional Veterinary Science,2015,59(9): 76-77.
[6] BUSH J,HU D. Walking on water: Biolocomotion at the interface[J]. Physics Today,2005,38(1): 339-369.
[7] FENG Xiqiao,GAO Xuefeng,WU Ziniu,et al. Superior water repellency of water strider legs with hierarchical structures: Experiments and analysis[J]. Langmuir: The ACS Journal of Surfaces and Colloids,2007,23(9): 4892-4896.
[8] SONG Y,SITTI M. Surface-tension-driven biologically inspired water strider robots: Theory and experiments[J]. IEEE Transactions on Robotics,2007,23(3): 578-589.
[9] 張明文. 仿生水黾机器人的研究[D]. 哈尔滨:哈尔滨工业大学,2010.
ZHANG Mingwen. Research of Bionic Water Strider Robot[D]. Harbin:Harbin Institute of Technology,2010.
[10]边婷婷,周海峰,刘春阳,等. 仿生水黾在救生船舶中的应用研究初探[J]. 应用能源技术,2015(10): 5-9.
BIAN Tingting,ZHOU Haifeng,LIU Chunyang,et al. Prospect of the bionic water strider in rescue ship[J]. Applied Energy Technology,2015(10): 5-9.
[11]GAO Xuefeng,JIANG Lei. Biophysics: Water-repellent legs of water striders[J]. Nature,2004,432(7013): 36.
[12]張新彬. 基于表面张力的仿水黾机器人研究[D]. 哈尔滨:哈尔滨工业大学,2016.
ZHANG Xinbin. Surface Tension-driven Biologically Inspired Water Strider Robot[D]. Harbin:Harbin Institute of Technology, 2016.
[13]VELLA D. Floating objects with finite resistance to bending[J]. Langmuir,2008,24(16): 8701-8706.
[14]ZHENG Quanshui,YANG Yu,FENG Xiqiao. The role of adaptive-deformation of water strider leg in its walking on water[J].Journal of Adhesion Science and Technology,2009,23(3): 493-501.
[15]KONG Xiangqing,LIU Jianlin,ZHANG Weijie,et al. Load-bearing ability of the mosquito tarsus on water surfaces arising from its flexibility[J]. AIP Advances,2015,5(3): 037101.
[16]JI Xiangying,WANG Jiawen,FENG Xiqiao. Role of flexibility in the water repellency of water strider legs: Theory and experiment[J]. Physical Review E,2012,85(2): 021607.
[17]丛茜,王骥月,李明,等. 基于逆向工程的水黾腹部建模及特征分析[J]. 应用力学学报,2017,34(2): 264-268.
CONG Qian,WANG Jiyue,LI Ming,et al. Modeling and characteristic analysis of water strider abdomen based on reverse engineering[J]. Chinese Journal of Applied Mechanics,2017,34(2): 264-268.
[18]EDWARD B. Surface tension supported floating of heavy objects: Why elongated bodies float better?[J]. Journal of Colloid and Interface Science,2016,463(20): 8-12.
[19]CAPONIGRO M,ERIKSEN C. Surface film locomotion by the water strider, gerris remigis say[J]. American Midland Naturalist,1976,95(2): 268-278.
[20]DICKINSON M. Animal locomotion: How to walk on water[J]. Nature,2003,424(6949): 621-622.
[21]田为军,王骥月,李明,等. 面向水上机器人的水黾运动观测[J]. 吉林大学学报(工学版),2018,48(3): 812-820.
TIAN Weijun,WANG Jiyue,LI Ming,et al. Observation of locomotion of water strider towards water strider robot[J]. Journal of Jilin University(Engineering and Technology Edition),2018,48(3): 812-820.
[22]LIU Jianlin,SUN Jing,MEI Yue. Biomimetic mechanics behaviors of the strider leg vertically pressing water[J]. Applied Physics Letters,2014,104(23): 231607.
[23]KOH J,YANG E,JUNG G,et al. Jumping on water: Surface tension-dominated jumping of water striders and robotic insects[J]. Science,2015,349(6247): 517-521.
[24]YANG E,SON J,LEE S,et al. Water striders adjust leg movement speed to optimize take off velocity for their morphology[J]. Nature Communications,2016,7(12): 13698.
[25]ZHENG Yelong,LU Hongyu,YIN Wei,et al. Elegant shadow making tiny force visible for water-walking arthropods and updated archimedes principle[J]. Langmuir,2016,32(41): 10522-10528.
[26]YIN Wei,ZHENG Yelong,LU Hongyu,et al. Three-dimensional topographies of water surface dimples formed by superhydrophobic water strider legs[J]. Applied Physics Letters,2016,109(16).doi:10.1063/1.4964788.
[27]LU Hongyu,ZHENG Yelong,YIN Wei,et al. Propulsion principles of water striders in sculling forward through shadow method[J]. Journal of Bionic Engineering,2018,15(3): 516-525.
[28]吉愛红. 动物运动接触反力测试系统、实验与分析[D]. 南京:南京航空航天大学,2007.
JI Aihong. Animals Surface Reaction Forces: Measuring System,Experiments and Analysis[D]. Nanjing: Nanjing University of Aeronautics and Astronautics,2007.
[29]SUN Peiyuan,ZHAO Meirong,JIANG Jile,et al. The study of dynamic force acted on water strider leg departing from water surface[J]. AIP Advances,2018,8(1): 015228.
[30]韩亚倩. 基于静电力的微力传感器标定系统设计与应用研究[D]. 天津:天津大学,2017.
HAN Yaqian. Design and Application of the Microforce Sensor Calibration System Based on Electrostatic Force[D]. Tianjin: Tianjin University,2017.
[31]ZHANG Lele,ZHAO Meirong,WANG Zhiyi,et al. Measurement of dynamic force acted on water strider leg jumping upward by the PVDF film sensor[J]. Journal of Visualized Experiments,2018,138(3): 58221.
[32]MIWA M,NAKAJIMA A,FUJISHIMA A,et al. Effects of the surface roughness on sliding angles of water droplets on superhydrophobic surfaces[J]. Langmuir,2000,16(13): 5754-5760.
[33]高雪峰,江雷. 天然超疏水生物表面研究的新进展[J]. 物理,2006,35(7): 26-31.
GAO Xuefeng,JIANG Lei. New progress in surface research of natural superhydrophobic organisms[J]. Physics,2006,35(7): 26-31.
[34]LIU Chunbao,ZHU Ling,BU Weiyang,et al. Superhydrophobic surfaces: From nature to biomimetic through VOF simulation[J].Micron,2018,107(1): 94-100.
[35]赵泰磊,宋付权. 仿生水黾机器人的漂浮特征[J]. 水动力学研究与进展,2012,27(2): 162-167.
ZHAO Tailei,SONG Fuquan. Floating characteristics of bio-mimetic water strider robot[J]. Chinese Journal of Hydrodynamics, 2012,27(2): 162-167.
[36]NAKAJIMA A,HASHIMOTO K,WATANABE T,et al. Transparent superhydrophobic thin films with self-cleaning properties[J]. Langmuir,2000,16(17): 7044-7047.
[37]BHUSHAN B,JUNG Y,KOCH K. Self-cleaning efficiency of artificial superhydrophobic surfaces[J]. Langmuir,2009,25(5): 3240-3248.
[38]陈钰,徐建生,郭志光. 仿生超疏水性表面的最新应用研究[J]. 化学进展,2012,24(5): 696-708.
CHEN Yu,XU Jiansheng,GUO Zhiguang. Recent advances in application of biomimetic superhydrophobic surfaces[J]. Progress in Chemistry,2012,24(5): 696-708.
[39]GOU Xuelian,GUO Zhiguang. Superhydrophobic plant leaves with micro-line structures: An optimal biomimetic objective in bionic engineering[J]. Journal of Bionic Engineering,2018,15(5): 851-858.
[40]王鹏伟,刘明杰,江雷. 仿生多尺度超浸润界面材料[J]. 物理学报,2016,65(18): 61-83.
WANG Pengwei,LIU Mingjie,JIANG Lei. Bionic multi-scale super-wet interface material[J]. Acta Physica Sinica,2016,65(18): 61-83.
[41]YOUNG T. An essay on the cohesion of fluids[J]. Philosophical Transactions of Royal Society,1805,95(1): 65-87.
[42]BARTHLOTT W,NEINHUIS C. Purity of the sacred lotus,or escape from contamination in biological surfaces[J]. Planta,1997, 202(1): 1-8.
[43]王立新,张硕研,纪运广,等. 超疏水表面仿生原型制备技术研究分析[J]. 河北科技大学学报,2020,41(1): 1-13.
WANG Lixin, ZHANG Shuoyan, JI Yunguang, et al. Research analysis of superhydrophobic bionic prototype preparation technology[J]. Journal of Hebei University of Science and Technology,2020,41(1): 1-13.
[44]屈孟男,侯琳刚,何金梅,等. 功能化超疏水材料的研究与发展[J]. 化学进展,2016,28(12): 1774-1787.
QU Mengnan,HOU Lingang,HE Jinmei,et al. Research and development of functional superhydrophobic materials[J]. Progress in Chemistry,2016,28(12): 1774-1787.
[45]吕婷,王媛怡,陈庆民. 全氟癸基硅烷(PTES)修饰微纳结构超疏水表面耐久性研究[J]. 南京大学学报(自然科学),2017, 53(1): 184-190.
LV Ting,WANG Yuanyi,CHEN Qingmin. Durability research of superhydrophobic surfaces prepared on micro/nano structure substrate modified by PTES[J]. Journal of Nanjing University (Natural Sciences),2017,53(1): 184-190.
[46]王庆成,杨晓东,曹国华,等. 仿水黾模型承载力试验研究[J]. 制造业自动化,2012,34(24): 134-136.
WANG Qingcheng,YANG Xiaodong,CAO Guohua,et al. Experimental study of supporting force of the bionic water strider model[J]. Manufacturing Automation,2012,34(24): 134-136.
[47]YAO Xi,CHEN Qinwen,XU Liang,et al. Bioinspired ribbed nanoneedles with robust superhydrophobicity[J]. Advanced Functional Materials,2010,20(4): 656-662.
[48]孫宝. 铜基超疏水界面构筑及抗结冰、抗结霜性能研究[D]. 南京:南京理工大学,2014.
SUN Bao. Fabrication of Superhydrophobic Surface on Cooper and Its Application in Anti-icing and Anti-frosting[D]. Nanjing: Nanjing University of Science & Technology,2014.
[49]仵玉芝,杜赵群. 仿生超疏水材料的研究进展[J]. 国际纺织导报,2018,46(6): 38-44.
WU Yuzhi,DU Zhaoqun. Research progress of the biomimetic superhydrophobic materials[J]. Melliand China,2018,46(6): 38-44.
[50]张世豪. 仿生水黾机器人建模及性能研究[D]. 杭州:浙江大学,2017.
ZHANG Shihao. Research on the Modeling and Property of Water Strider-Like Robot[D]. Hangzhou: Zhejiang University,2017.
[51]郑俊,张嘉钟,于开平,等. 仿水黾高速水上运动机器人划水产生的半球涡特征及其推进特性分析[J]. 船舶力学,2018, 22(5): 517-527.
ZHENG Jun,ZHANG Jiazhong,YU Kaiping,et al. Propulsion features of the hemispherical vortices produced by the high speed bionic robot mimicking the water strider locomotion on water surface[J]. Journal of Ship Mechanics,2018, 22(5): 517-527.
[52]HU D,CHAN B,BUSH J. The hydrodynamics of water strider locomotion[J]. Nature,2003,424(6949): 663-666.
[53]吴立成,丁樑,郭栋. 水上漂浮仿生水黾机器人[P]. 中国专利: 200610112601.7,2006-08-25.
[54]WU Licheng,LIAN Zhipeng,YANG Guosheng,et al. Water dancer Ⅱ-a: A non-tethered telecontrollable water strider robot[J]. International Journal of Advanced Robotic Systems,2011,8(4).doi:105772/45704.
[55]OZCAN O,WANG H,TAYLOR J,et al. Strider Ⅱ: A water strider-inspired miniature robot with circular footpads[J]. International Journal of Advanced Robotic Systems,2014,11(6).doi:10.5772/58701.
[56]GAO Tiehong,CAO Junyi,GAO Feng,et al. The research of a bionic robot that can walk on water surface based on water strider[C]// Technology & Innovation Conference.[S.l.]:[s.n.],2006: 2180-2185.
[57]ZHANG Xinbin,ZHAO Jie,ZHU Qing,et al. Bioinspired aquatic microrobot capable of walking on water surface like a water strider[J]. ACS Applied Materials & Interfaces,2011,3(7): 2630-2636.
[58]ZHOU Sui,ZHANG Weiping,ZOU Yang,et al. Piezoelectric driven insect-inspired robot with flapping wings capable of skating on the water[J]. Electronics Letters,2017,53(9): 579-580.
[59]KOH J,YANG E,JUNG G,et al. Jumping on water: Surface tension-dominated jumping of water striders and robotic insects[J]. Science,2015,349(6247): 517-521.
閆征,王立新,潘盼.
水黾仿生特性与工程应用研究进展
[J].河北科技大学学报,2020,41(3):210-217.
YAN Zheng,WANG Lixin,PAN Pan.
Research progress of water strider in bionic characteristic and engineering application
[J].Journal of Hebei University of Science and Technology,2020,41(3):210-217.
猜你喜欢
东方教育(2017年24期)2018-01-11
科技视界(2017年18期)2017-11-16
科教导刊(2017年19期)2017-09-06
中国科技纵横(2017年5期)2017-05-12
科技创新与应用(2017年11期)2017-04-27
文艺生活·下旬刊(2017年2期)2017-03-18
小学阅读指南·低年级版(2016年11期)2017-02-06
少儿科学周刊·少年版(2015年11期)2015-12-17
小学科学(2015年9期)2015-09-28
农业科技与装备(2014年2期)2014-11-28
