基于状态估计的多机编队保持技术研究
2020-07-20 16:20时磊陈行勇
无人机 2020年2期
时磊 陈行勇

针对工程中通信带宽有限情况,研究了基于TDMA网络的多无人机编队控制发散问题,通过将网络通信时延转变为具有时变异步时延的切换拓扑网络一致性收敛问题,设计了一种基于状态估计的多机编队控制协议。
中国人民解放军91404部队,河北省秦皇岛市066000
多无人机系统协同作战使用具有分布式、低成本等优点,近年来受到广泛关注,美国主导的多无人机协同作战项目的研制、部署、分布式协同作战逐渐从理论走向工程实现。编队协同控制是多无人机协同作战的核心,目前多无人机协同控制研究主要针对时变通信、有界输入控制、环境扰动等情况下的编队保持问题。研究成果主要包括领航一跟随法、虚拟结构法、人工势场法以及多智能体一致性方法。
本文针对工程中常用的时分多址(TDMA)通信网络异步时变时延导致多无人机系统内协同信息更新时刻不一致引起的编队控制发散问题,设计了基于编队状态估计的协同控制协议,采用非更新时刻的无人机历史状态和卡尔曼滤波器对当前时刻无人机状态进行估计,实现编队状态通信时刻对齐,有效降低了编队内协同信息等效时延,放宽了网络存在时变时延情况下一致性理论的收敛上界条件,为一致性理论在多无人机协同控制的工程应用提供支撑。仿真结果表明,该方法能有效提高多机協同编队的鲁棒性,抑制通信时延对编队保持的影响。
编队通信模型
网络拓扑描述
含有Ⅳ架无人机的编队通信关系可采用图论中的有向拓扑图GN进行描述,其中将无人机看作拓扑图中的一个节点,无人机之间的信息交互看作拓扑图的有向边。
无人机编队数学模型
常用坐标系及转换
为方便描述无人机运动情况和多无人机编队队形,分别选取航迹坐标系和大地坐标系作为参考,定义如下:
(1)航迹坐标系
(2)大地坐标系
(3)大地坐标系转航迹坐标系
由矩阵论可知,同一向量在不同坐标系的关系可通过变换矩阵描述。定义从Sg到Sk的坐标变换矩阵如下:无人机质点模型
由于无人机协同控制主要对无人机外回路特性进行研究,因此忽略无人机气动特性、姿态、动力等因素,在航迹坐标系内建立三自由度无人机质点模型。
假设无人机飞行过程中无侧滑,且飞行距离相比地球半径可忽略,可认为地面水平且无旋转,编队中第i架无人机的动力学方程为:第i架无人机的运动学方程为:
编队相对关系描述
假设无人机已形成预期编队,以四机编队为例对编队内无人机空间位置关系进行描述,△i、△j分别表示无人机i和无人机j相对于长机的位置差向量, ξ0 、 ξi\ξj分别为长机、无人机i和无人机j在三维空间中的位置向量,它们之间的对应关系如下:
无人机编队控制器设计
模型转化
为方便研究多机协同一致性,将公式(2)所描述的无人机非线性模型转化为标准二阶积分动力学系统模型。记无人机i在大地坐标系中的位置向量ξi=(xi,yj,zi),速度向量ξi= (vxi,Vyj,vzi),无人机编队协同控制向量ai= (a1i,a2i,a3i)'。对速度向量
问题描述
本文研究的是采用时分多址通信数据链的多无人机系统协同编队保持问题。
为建立时分多址通信网络模型,不失一般性,考虑由Ⅳ架无人机组成的时分多址有向网络,通信周期为T,每架无人机所占通信时帧长度T
假设Tk时刻为无人机m通信时刻,记为 ,其余无人机静默接收,则无人机网络中无人机i所存储的无人机j状态 为:
即时分多址通信网络模型可转化为具有整数阶时变通信时延的切换拓扑有向图。
在时分多址网络中,无人机通信时延非常值,在每个通信时刻及不同的无人机状态,具有的时延也不一致。网络中含有的最大时延为:
且随着无人机编队规模Ⅳ的增加,通信网络中所含最大时延呈线性增长。
控制协议设计
为解决上述整数阶时变时延切换拓扑情况下的多机编队保持问题,设计编队协同控制协议如下:
考虑到无人机协同控制解算周期较短,可近似认为无人机做匀加速直线运动,协同控制量为模型噪声,设计线性卡尔曼滤波器,对无人机状态进行估计。
为提高滤波精度,应在每个通信时刻对编队内所有无人机状态进行估计,实现协议中无人机状态时刻对齐。
仿真实例
本节以1架长机和4架僚机组成编队为例,通过仿真分析,验证所提出的方法。
采用文中时分多址数据链通信,以1号机为长机,2-5号机为僚机,仿真步长10ms,编队内每架无人机间隔20ms依次发射本机状态,编队内5架无人机协同信息更新周期及协同控制周期设置为100mS。
设UAV1为长机,航向正东(x=90°),沿直线航迹定高平飞。编队内各无人机位置、高度、速度、航向等参数如表1所示。
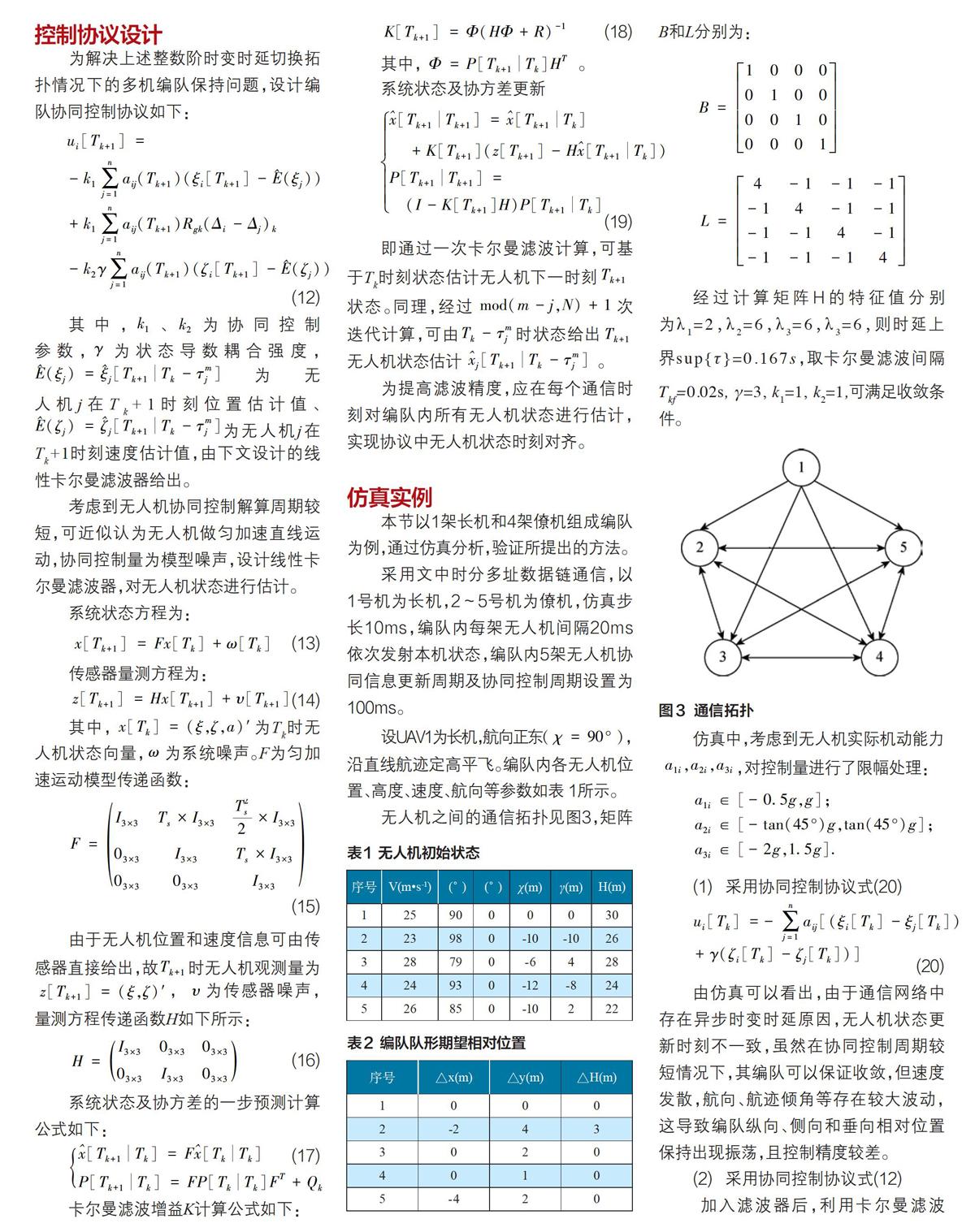
无人机之间的通信拓扑见图3,矩阵
由仿真可以看出,由于通信网络中存在异步时变时延原因,无人机状态更新时刻不一致,虽然在协同控制周期较短情况下,其编队可以保证收敛,但速度发散,航向、航迹倾角等存在较大波动,这导致编队纵向、侧向和垂向相对位置保持出现振荡,且控制精度较差。
(2)采用协同控制协议式(12)
加入滤波器后,利用卡尔曼滤波器对短时间内编队整体状态进行预测,获得比无人机历史状态更准确的当前时刻状态估计,可有效减小协同控制状态误差。
通过仿真可以看到,采用状态估计法后,由于在时间上对齐了协同控制律中各无人机状态,编队内无人机队形收敛,相对位置精度保持较好,不存在振荡现象。
而且短时状态通过估计获得,编队状态更新不依赖于数据链完整更新周期,因此可以做到协同控制周期小于信息更新周期,进一步提高编队协同控制算法稳定性和编队控制精度。
结论
本文针对时分多址网络通信整数阶时变时延导致多无人机系统编队控制精度差甚至发散问题,设计了基于状态估计的编队控制协议。理论分析与仿真结果表明:
(1)基于时分多址的数据链组网通信系统,其网络内所含时延时变且随网络规模增大而线性增大;
(2)设计了基于状态估计的编队控制协议,通过合理设计卡尔曼滤波器参数,利用编队无人机历史协同信息,实现了对当前非通信时刻其他无人机状态估计,解决了协议中状态信息时刻不一致导致的编队发散问题,适用于时分多址组网的大规模编队控制;
(3)本文所提方法能够有效降低协同一致性协议对通信网络时变时延上界要求,增强了协议对网络时延的鲁棒性。
猜你喜欢
电脑知识与技术(2021年22期)2021-09-14
电脑知识与技术(2021年22期)2021-09-14
现代信息科技(2021年21期)2021-05-07
语数外学习·高中版中旬(2021年11期)2021-02-14
花火B(2019年3期)2019-04-27
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中学生数理化·高二版(2016年5期)2016-05-14
航空知识(2001年5期)2001-06-12