
永磁同步发电机模型预测直接转矩控制方法研究
2020-07-22 09:50刘国联
通信电源技术 2020年9期
刘国联
(湖南铁路科技职业技术学院,湖南 株洲 412000)
0 引 言
目前,常用的几种永磁同步放电机(Permanent Magnet Synchronous Generator,PMSG)的作业原理主要依靠直接扭矩控制和矢量控制[1-2]。相比之下,前者更为容易实现,所以如何合理应用算法提高电机直接转矩控制预测精准度成为了重点研究内容[3]。
1 PMSG传统控制算法分析
1.1 传统控制算法概述
传统控制算法建立在同步旋转坐标系上,模型如下:
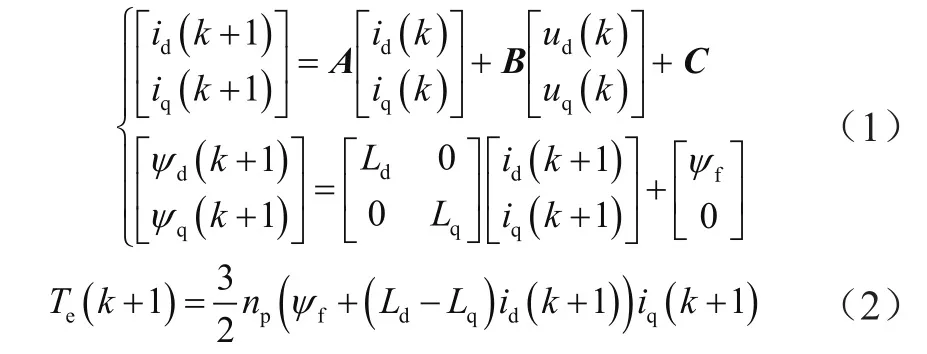
其中,id和iq分别代表定子电流在电机同步旋转过程中沿着d坐标系、q坐标系方向产生的分量;ψq和ψd分别代表定子磁链沿着d坐标系、q坐标系方向产生的分量;uq和ud分别代表定子电压在电机同步旋转过程中沿着d坐标系、q坐标系方向产生的分量;k代表电机运行时刻;ψf代表永磁体磁链;Lq和Ld分别代表位于q轴和d轴的电感;np代表电机极对数;x(k+1)代表电机在k+1时刻下作业产生的转矩变量。A、B、C均为矩阵,用于确定同步转速、采样周期等参数。在实际应用中,此算法暴露出动弹响应慢等问题。
1.2 传统控制算法缺点
依据前文概述可知,PMSG传统控制算法需要建立在同步坐标系上计算转矩控制数据。该算法在先后改进过程中,分别暴露出计算量大问题、电压矢量变化依附性问题。从理论层面分析,后者计算量有所减少,符合电机转矩控制计算预测需求,但是7个电压矢量的变化,同样增加了算法运算量,对电机动态响应速度的提升帮助不大[4]。在实践应用中,传统控制算法参数依赖性过强,并且存在严重的鲁棒性。因此,改进PMSG控制算法策略仍需深入探究。
2 PMSG控制算法的改进
2.1 算法改进总体方案
对于传统控制算法存在的不足,本文利用全阶滑模观测器,对算法进行了改进,在静态坐标系上形成了新的控制算法体系,即MP-DTC控制算法。图1为MP-DTC控制算法框图。
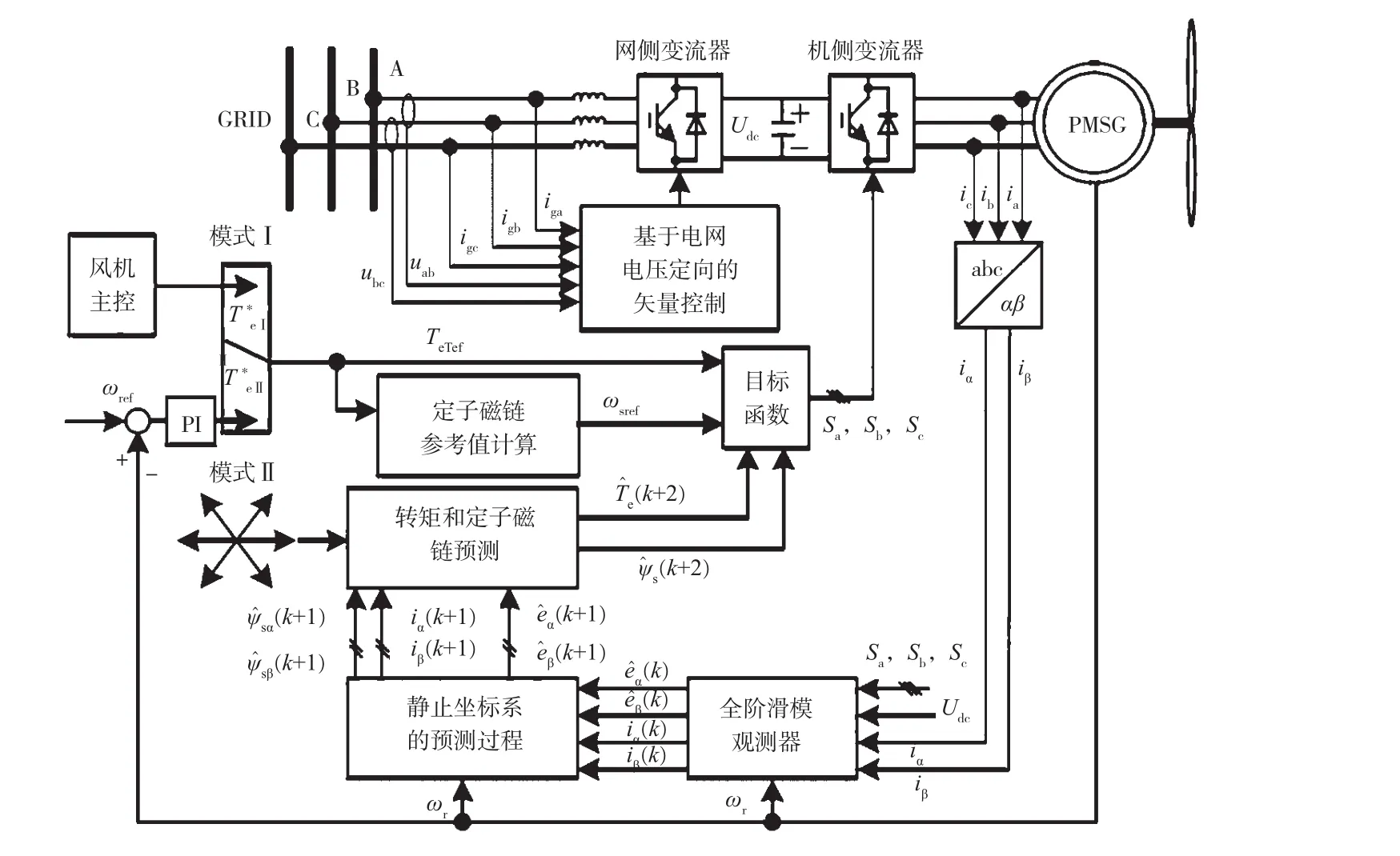
图1 MP-DTC控制算法框图
图1中设定了两种电机控制模式,模式Ⅰ相对简单,通过计算定子磁链参考值,构建目标函数,在网侧变流器和机侧变流器作用下,对PMSG作业控制进行预测。模式Ⅱ在对转矩和定子磁链进行预测的同时,增加了静置坐标系的预测,引入全阶滑模观测器进行处理,形成新的目标函数,同样网侧变流器和机侧变流器作用下完成预测。该控制算法不依赖参数设置,两种模式应用在不同情况下预测,不仅可以弥补传统算法的不足,还可以尽可能减少计算量,提高动态响应速度。
2.2 全阶滑模观测器的应用
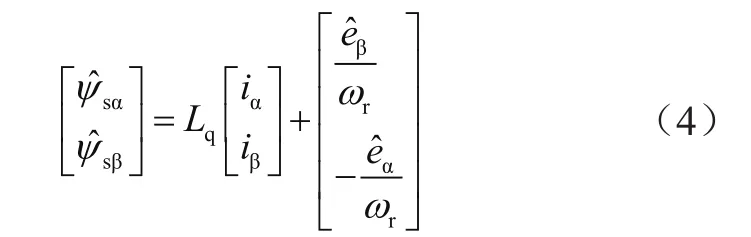
本文提出改进算法的核心为全阶滑模观测器,利用该设备观测电机的电磁转矩和定子磁链。通过分析电机作业原理中的等效电动势特点,在静止坐标系上构建预测模型。

其中,eα和eβ均为等效反电动势;D代表微分算子。
关于全阶滑模观测器的构建,本文直接引用研究比较成熟的模型体系,即文献[4]的全阶滑模观测器。利用符号函数,计算观测器的增益等参数数值,估算等效反电动势,代入公式(4)进行计算,能够得到电机正常作业下的定子磁链预算值。
关于电机正常作业下的电磁转矩预测计算公式如下:

其中,代表电磁转矩预测结果。
2.3 静止坐标系预测方案
本文采用前向欧拉算法,对静止坐标系上的预测模型,即式(3)采取离散化处理,通过调节电缆和电阻2个参数数值,以减小外界因素影响,使得预测精准度得以提升。将预测得到的转矩数值和定子磁链数值代入公式(6)中,得到电机的最优电压矢量。

将最优电压矢量作用于逆变器,从而实现PMSG预测控制。该算法功能实现具体流程如下。
第一步:构建滑膜观测器模型,根据当前PMSG正常作业情况下各项参数数值,计算反电动势。
第二步:对静止坐标系下的模型采取离散化处理,结合反电动势数据,预测电机运行k+1时刻下的定子电流数值。
第三步:依据反电动势和定子电流数值,计算同一时刻下的定子磁链。
第四步:采用电压矢量选择方法,依据电压分量和电压矢量,预测下一个时刻的分量等参数值。
第五步:将第四步的计算结果代入式(5)中,得到电磁转矩预测结果。每一组数值预测方法相同,根据矢量组别划分情况,得到相应组数的预测结果。
第六步:将前两个步骤计算得到的转矩和定子磁链结果代入目标函数中,求取目标函数值最小情况下的电压矢量。
第七步:将第六步计算结果作为电机作业的最优矢量,以此控制PMSG。
通常情况下,备选的电压矢量数值为4个或者7个,需要根据实际情况计算数值,得到最优矢量。
3 测试分析
3.1 测试参数的设定
本文将两种算法均应用至PMSG控制中,通过模拟仿真应用结果,得出判断结论。表1为永磁同步发电机测试参数的设定情况。

表1 永磁同步发电机测试参数的设定
按照表1中方案设定PMSG参数,分别开展转矩和转速测量实验。其中,转矩的测量实验是对参数突增情况下传统算法与改进算法稳定性能进行测试,转速测量实验是对传统算法与改进算法动态响应耗时进行测试。
3.2 测试结果分析
按照设计的测试方案,分别对参数突增情况下传统算法与改进算法稳定性能、传统算法与改进算法动态响应耗时进行测试,得到图2和图3对比实验测试结果。
图2左侧图为传统算法应用下的PMSG的转矩稳定性能测试结果,右侧图为本文提出改进算法应用下的PMSG的转矩稳定性能测试结果。通过对比生成的稳定性能曲线可知,本文提出的改进算法转矩测量稳定性更高一些,生成结果更加可靠。
图3左侧图为传统算法应用下的PMSG的软件执行时间,右侧图为本文提出改进算法应用下的PMSG的软件执行时间。很明显,改进后的算法软件执行耗时较短,上升沿代表作业状态,改进后的算法软件执行耗时缩减了24.4 μs,动态响应更加灵活。

图2 参数突增情况下传统算法与改进算法稳定性能测试结果

图3 传统算法与改进算法软件执行时间对比图
4 结 论
本文以永磁同步发电机作为研究对象,针对传统算法在预测转矩控制方面存在的动态响应不够灵活、转矩测量不够稳定问题,引入全阶滑模观测器,提出新的预测算法。测试结果表明,改进后的算法达到提高了转矩测量稳定性及灵活性,可以作为PMSG转矩控制预测工具。
猜你喜欢
微电机(2022年8期)2022-10-12
选煤技术(2022年2期)2022-06-06
传感器与微系统(2022年3期)2022-03-23
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
微电机(2020年7期)2020-08-01
微特电机(2019年7期)2019-08-02
北京航空航天大学学报(2017年1期)2017-11-24
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年24期)2017-02-02
