
香蕉地深松锄草联合作业机的设计与试验
2020-07-22 06:41梁雨峰张喜瑞杨洛宾
机械设计与制造 2020年7期
梁雨峰,吴 鹏,张喜瑞,杨洛宾
(海南大学机电工程学院学院,海南 海口 570228)
1 引言
在中国,香蕉是主要的热带水果之一,是华南农业经济中的支柱性产业[1]。同时,香蕉也是重要的经济作物和粮食作物,是世界上进出口贸易量最大的水果,年交易量居各类水果之首,交易金额居第二[2]。
目前香蕉产业已是我国南亚热带地区相当重要的产业,在各主产区的农业产值中占有十分重要的位置。该地区香蕉种植园翻耕作业以传统的耕种体系为主,对实现香蕉高产做出了重要贡献。但是这也带来了诸多问题,如:土壤耕作层以下压实形成犁底层,土壤表面粗糙度降低,雨水不能快速渗入土壤而形成表面径流,带走大量的土壤和有机质。在降水24h 的情况下,雨水大都滞留在(0~10)cm土层中,土壤含水率随土层深度增加而缓慢递减[3]。
解决这些耕作问题的有效途径之一即是采用深松。深松技术是一项新的土壤耕种方法,利用深松技术对香蕉地土壤进行疏松,打破原多年翻耕形成的犁底层,加深耕作层,调节香蕉地土壤三相比[4]。同时,深松作业可增强土壤蓄水保墒和抗旱防涝能力[5]。这在一定程度上提高香蕉产量和香蕉树根系生长及抗倒伏能力。深松技术的推广能有效满足农作物生长需要,促进作物根细下扎,实现农作物高产、稳产,保障作物生产安全。
目前,深松机具在国外已经得到广泛应用,且拥有一定的规模化和标准化;我国虽然也取得了一定的研究成果,但大多机具功能都比较单一、作业深度不稳定、对不同环境条件下的作业适应性能差等[6]。国外深松机具已相当完善,虽然深松的耕幅和深耕范围较大、速度较快、作业质量也较好,但其机具也较大,主要与大功率拖拉机配套使用,不适合我国地块较小、拖拉机功率较小的国情,故在我国无法适用,而国内现有的深松机大多功能都比较单一。为了减少机具进地次数、工作量,解决机具仍然不能满足农民现状的要求。设计了一种适用于热带农业地区的香蕉地深松锄草联合作业机,该深松机具有结构简单、工作阻力小、土壤扰动小与拖拉机配套使用等特点,能够降低工作量,减小耕地成本等优点,对促进热带作物地区农业发展,具有非常重要的意义。
2 总体设计与工作原理
2.1 总体机构与技术参数
深松锄草联合作业机结构示意,如图1 所示。

图1 香蕉地深松锄草联合作业机结构示意图Fig.1 The Structure of the Banana Field Shovel Type Deep Pine Machinel
机具与15kW 以上的拖拉机配套使用。本机整体采用2 部分结构,主要有深松系统和锄草系统。深松系统主要由深松铲、U型螺栓和梯形机架组成;锄草系统主要由悬挂机构和带翼锄草铲组成。整机主要技术参数,如表1 所示。

表1 深松锄草联合作业机的主要技术参数Tab.1 The Main Technical Parameters of Banana Field Shovel Type Deep Pine Machine
2.2 工作原理
深松锄草联合作业机悬挂于拖拉机的后方,作业时,拖拉机带动铲式深松机在香蕉树间以一定的速度行驶,梯形机架上的可调深松铲装置对香蕉树根周围土壤进行深松;通过悬挂装置和销钉调节松土深度,调节到一定深度的深松铲在土壤中向前匀速运动,把深度范围以上的土壤松碎;随着拖拉机的前进,梯形机架上的可调带翼锄草铲装置除去香蕉树行距之间的杂草,锄草的垂直高度可通过悬挂装置和销钉调节。
3 主要部件与参数设置
3.1 深松铲
3.1.1 深松铲的设计原理
在香蕉地作业时,拖拉机工作在香蕉茎秆之间,配置在深松机上的深松铲通过悬挂装置和销钉调节松土深度,深松铲尖以(25~30)°的角度入土,使位于铲尖前面的土壤受到挤压而破碎,通过裂纹的延伸到达土壤的表层,使土壤破碎。该深松铲最大深松深度为350mm。
3.1.2 深松铲的设计结构
深松锄草联合作业机重要部件之一为深松铲,深松铲由铲柄、铲齿、连接板和金属楔四部分构成,深松铲铲齿通过金属楔与深松铲铲柄下端固接,铲柄上端与深松铲连接板通过2 个销钉固定连接。深松部件与连接板的连接方式牢固可靠,在工作的时候无松动的现象。深松铲机构示意图,如图2 所示。
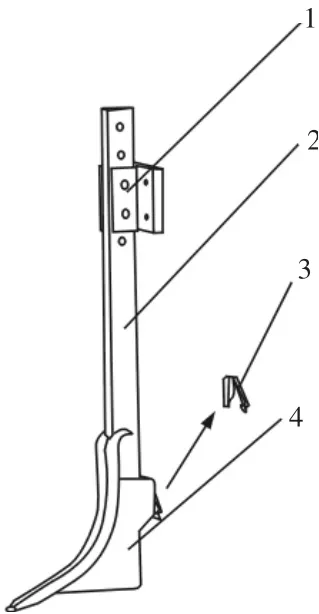
图2 深松铲结构示意图Fig.2 The Structure of Deep Relief Shovel
3.2 带翼锄草铲
3.2.1 锄草铲结构设计
本香蕉地带翼锄草铲主要由翼铲、锄草铲铲尖、锄草铲铲柄、锄草铲连接板和金属楔等组成。锄草铲结构示意图,如图3 所示。此锄草铲的特征在于连接板有前后两个矩形侧面,连接板通过六角螺栓与锄草铲铲柄相固连;铲柄分为两个面,分别为前侧面和后侧面,铲柄上部分开有4 个螺栓固定孔,铲柄下部通过金属楔与铲尖相连接;金属楔可通过在竖直平面内转动的幅度,控制铲柄和铲尖的松紧程度;铲尖与铲柄连接处有一连接槽,铲柄中部左右两侧面分别焊合在连接槽上;铲尖的左右两侧面各连接一块铲翼,两块铲翼向两侧展开,被固定螺栓固定在锄草铲尖左右两个侧面上。连接板通过U 型螺栓与锄草机的机架相连接。

图3 带翼锄草铲结构示意图Fig.3 The Schematic Diagram of the Structure of a Hoe Blade with Wings
3.2.2 铲尖受力分析
耕作机械的工作部件由各种楔子演变来的,应用楔子的原理来使土壤破裂,造成土壤的反复剪切失效,最后形成许多小颗粒[7]。楔子有深松铲和锄草铲等不同形式,锄草铲属于楔子的演变而形成,对锄草铲进行受力分析,可应用深松铲铲尖受力分析方法[8],建立深松铲、锄草铲铲尖受力示意图,如图4 所示。
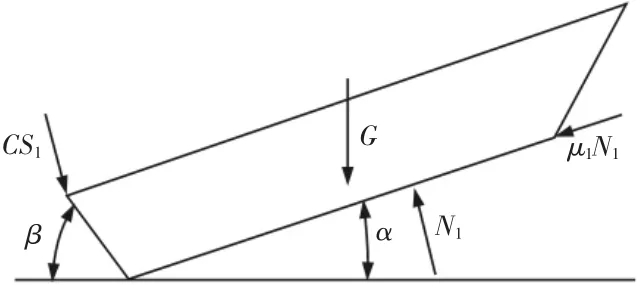
图4 铲尖受力示意图Fig.4 The Force Diagram of Shovel Tip
根据文献[7]的受力方程:
式中:G—铲尖上部土壤重力,取值600N;β—倾斜角,取值35°;S1—土壤前端剪切失效面积;C—土壤单位粘聚力;F1—土壤对铲尖的作用力;N1—铲尖受到上部土壤的压力;α—铲尖入土角23°;1—土壤与铲面摩擦系数,取值0.6;d—铲尖入土深度;W—铲尖厚度,取值4mm;F1—土壤水平阻力

根据农业机械设计手册,不同性质的土壤,土壤单位粘聚力大小不同。依据海南香蕉地土壤性质,取土壤单位粘聚力为0.5N/cm2[10]。锄草铲尖入土深度为(0~150)mm,土壤前端剪切失效面积为(0~0.035)mm2,计算得到对应锄草铲铲尖受到土壤阻力为(0~1535)N;深松铲铲尖入土深度为(0~350)mm,土壤前端剪切失效面积为(0~0.040)mm2,计算得到对应深松铲铲尖受到阻力为(0~3575)N。

表2 材料性能参数Tab.2 The Performance Parameters of Weeding Shovel Material
锄草铲、深松铲的固定螺栓采用材料为30CrMo,其余部件采用材料为65Mn,材料相关数据,如表2 所示。
4 有限元分析
采用soliworks 软件对深松铲、锄草铲进行建模。建模完成后将模型导入ANSYS 中进行网格划分并对模型进行求解。三维模型示意图,如图5、图6 所示。深松铲、锄草铲进行网格划分时,采用solide45 单元进行划分,solide45 单元用于构造三维固体结构,单元通过8 个节点来定义,每个节点有3 个沿着x,y,z方向平移的自由度。单元具有塑性、蠕变、膨胀、应力强化、大变形和大应变能力。设置网格形状为8 个节点四边形,整个深松铲模型由17586 个单元组成,铲壁节点数为9458,单元数为15687;锄草铲模型由190625 个单元构成,铲壁的节点数为9658,单元数为151267,铲翼模型节点数为4568,单元数为124862。锄草铲、深松铲网格划分模型,如图7、图8 所示。

图5 深松铲三维模型示意图Fig.5 The Schematic Diagram of 3d Model of Deep Relief Shovel

图6 带翼锄草铲三维模型示意图Fig.6 The Schematic Diagram of 3d Model of a Hoe Blade with Wings

图7 锄草铲网格划分示意图Fig.7 The Schematic Diagram of Hoeing Spade Meshing

图8 深松铲网格划分示意图Fig.8 The Schematic Diagram of Deep Pine Shovel Meshing

图9 深松铲铲尖等效应力云图Fig.9 The Equivalent Stress Nephogram of Shovel Tip of Deep Pine Shovel
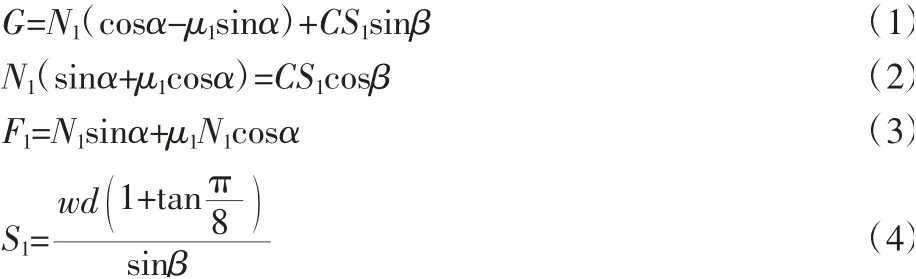
图10 锄草铲铲尖等效应力云图Fig.10 The Cloud Chart of Equivalent Stress of Shovel Tip

图11 深松铲铲尖总位移云图Fig.11 The Cloud Chart of Total Displacement of Shovel Tip of Deep Pine Shovel

图12 锄草铲铲尖总位移云图Fig.12 The Cloud Chart of Total Shovel Tip Displacement
在进行香蕉地深松锄草作业时,深松铲深松最大深度为350mm,带翼锄草铲锄草最大深度为150mm。在ANSYS 中进行分析,对不同深度下的土壤,深松铲、锄草铲所受阻力进行仿真模拟,并对模拟结果进行分析。此处根据前面理论计算结果,对深松铲铲尖预设最大阻力为3575N,锄草铲铲尖预设最大阻力大小为1535N。在进行模拟铲尖受力之前,通过GUI 操作中displacement对铲尖施加约束,限制其自由度。此处在深松铲铲柄及连接板处施加约束,限制3 个自由度和沿垂直铲尖方向的自由度;锄草铲铲尖侧端,两侧铲翼及铲柄部分施加约束,限制4 个自由度和沿折凹处的转动的自由度。在ANSYS 中通过GUI 操作中Press 施加载荷,运算器进行计算,分别得到深松、锄草铲尖应力云图、总位移云图,如图9~图12 所示。
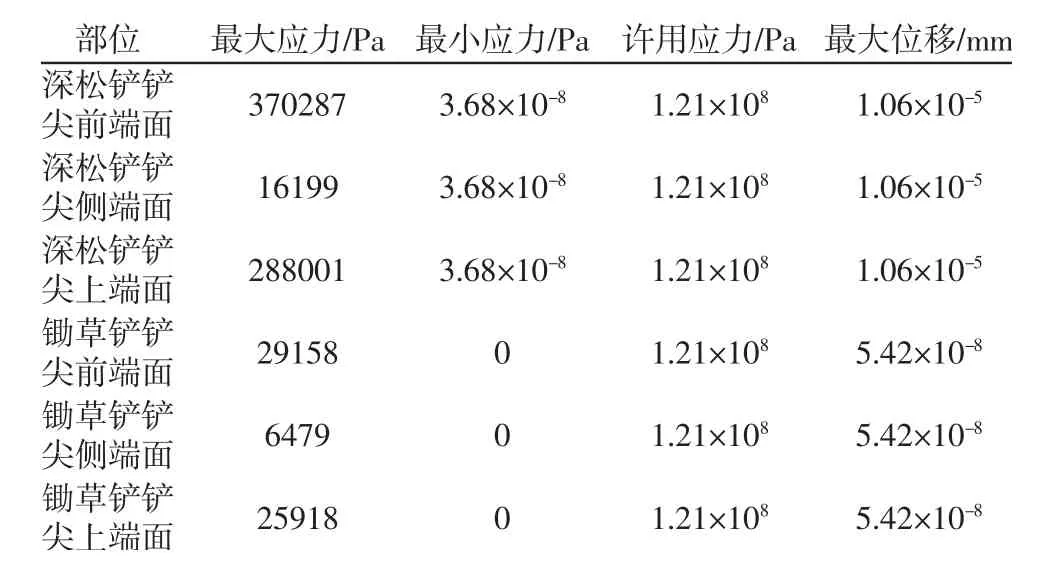
表2 有限元分析结果Tab.2 The Blade Analysis Results
铲尖在进行深松和锄草作业时,最大应力集中在铲尖前端与土壤接触部位,如图9、图10 所示。当土壤阻力达到3575N 时,深松铲铲尖所受最大等效应力为37029Pa;土壤阻力达到最大值1535N 时,锄草铲铲尖所受最大等效应力为29158Pa。深松铲和锄草铲数值大小满足许用应力,深松铲和锄草铲应力大小满足设计要求,即材料刚度、强度满足所需要求。
深松铲、锄草铲铲尖最大变形位于铲尖前端部,变形大小分别为0.106×10-4mm、0.542×10-7mm,铲尖变形数值微小,越接近铲尖后面到铲柄部位变形程度越小,如图11、图12 所示。在深松锄草过程中,土壤对铲尖作用变形微小。
5 其他部件设计

图13 悬挂机构与梯形机架结构示意图Fig.13 The Structure of Uspension Mechanism and Trapezoidal Frame
深松机的深松系统和锄草系统通过悬挂机构和梯形机架结合连接在一起。梯形机架由长梁、斜横撑、直横撑和短梁组成,2个斜横梁左端固定在长梁前后两端的右侧右端固定在短梁前后两端的左侧,2 个斜横梁、长梁和短梁构成梯形机架3 的梯形框,3 个直横撑等间距垂直置于长梁和短梁之间。悬挂机构4 由人字形拉杆、牵引杆、斜拉杆和连接杆组成,2 个水平设置的牵引杆与长梁的左侧面垂直固接,2 个人字形拉杆下端分别固接在2 个牵引杆上,上端通过螺栓连接2 个斜拉杆,2 个斜拉杆通过螺栓固接在连接杆的前后两侧,人字形拉杆的上端以及两个牵引杆都用销钉与拖拉机相连。采用人字形拉杆使深松机受到的压力变小,有利于机件的前行。悬挂机构和梯形机架示意图,如图13 所示。
6 田间试验与结果
6.1 试验材料与条件
为检验深松除草联合作业机的工作性能,进行田间性能试验。田间试验在海南大学农机实验基地进行,试验区土壤为砖红壤。试验设备有香蕉地深松锄草联合作业机、拖拉机两台、笔记本电脑1 台、锁紧环扣2 个、钢丝绳2 条、标记杆24 根、米尺、8203型钢卷尺。本试验选取作业机作业时的速度大小为影响深松锄草联合作业机作业时土壤阻力的主要因素。试验田长160m,宽100m,深松土壤深度为(0~350)mm,锄草土壤深度为(0~100)mm。采用GB/T5262-2008 五点测量法测量试验的区域(0~30)cm土层的土壤坚实度及土壤含水率,取平均值,如表3 所示。
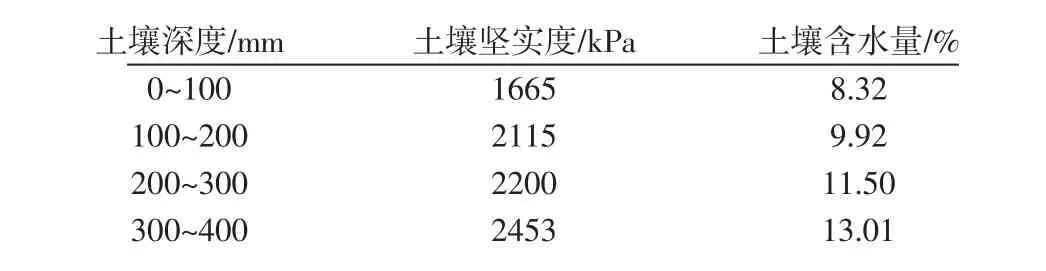
表3 0~30cm 土层土壤坚实度及土壤含水量Tab.3 Soil Firmness and Soil Water Content in 0~30cm Soil Layer
6.2 试验方法
将试验田划分为一块小的区域,每个区域长40m、宽25m,在区域内插上标记杆。1 号拖拉机挂1 挡在前行走,2 号拖拉机挂空挡并挂接深松机,由1 号拖拉机拖拽2 号拖拉机前行。用锁紧环扣、钢丝绳索将传感器连接在两台拖拉机的中间来用于测定1号拖拉机不挂深松机时和挂深松机时的牵引阻力,两者的差值即为试验时的牵引阻力。为进行试验对比,作业时深松机的深松铲分别采用流线型和传统型。根据锄草率的公式[11]为:

式中:Qz—耕前杂草株数;Hz—耕后杂草株数
动态应变仪和笔记本电脑连接起来,用测力程序软件测量和记录试验车以不同的速度平稳行走20m 内牵引力大小数值,计算平均值。拖拉机分别采用不同角度的铲刃在区域内来回前进锄草,记录锄草之前杂草株数为100 株,再测得每次锄草后杂草的数目。

图14 田间试验现场Fig.14 Field Test Site

图15 试验后深松及杂草情况Fig.15 Weed Condition after Experiment

图16 检测方法原理示意图Fig.16 Schematic Diagram of Detection Method Principle
6.3 试验结果
通过控制实验机车的速度,测得在不同速度下的牵引力大小,得出深松铲实验结果,如图17 所示。根据文献[12]公式,锄草铲试验结果,如表4 所示。

图17 深松铲试验结果曲线图Fig.17 The Curve of Results of Deep Pine Shovel Test

表4 锄草铲试验结果Tab.4 Test Results of Weeding Shovel
6.4 试验结果分析
该试验研究深松铲作业速度变化对其深松阻力的影响。同时,对比传统深松铲,检验新型深松铲的减阻效果;并探究锄草铲铲刃夹角大小对锄草率的影响程度进行分析。
试验结果表明:在土壤条件一致的香蕉园中,深松锄草联合作业机的速度越大,深松机受到的阻力越大;流线型深松铲对比传统型深松铲,具有明显的减阻效果;同时,在一定范围内,锄草铲铲刃夹角越大,锄草率越大,效率也越高;试验结果显示,锄草铲铲刃夹角在120°左右时,锄草铲的锄草效果达到最佳。
7 结论
(1)深松铲、带翼锄草铲进行土壤作业时,深松铲、锄草铲受到阻力分别约为(0~3575)N、(0~1535)N;对深松铲和锄草铲铲尖的ANSYS 分析可知:在进行深松锄草作业时,最大应力集中在铲尖前端部,数值分别为370287Pa、29158Pa,在许用应力范围内,满足设计要求;深松、锄草铲尖变形微小,铲尖在锄草作业时能保持较大的抗阻性能,抵抗变形能力强,在锄草作业时维持较好的稳定性。(2)试验表明:深松的速度越快,深松铲受到的阻力越大,对比传统型深松铲,流线型深松铲深松作业时的牵引阻力降低44%;在一定范围内,锄草铲铲刃夹角越大,锄草率越高,锄草铲铲刃夹角为120°左右时,锄草铲的锄草效果达到最佳。(3)整机采用可垂直调节的锄草铲,提高了机具的锄草性能。深松锄草同时作业,可同时进行土壤深松作业和香蕉植株间杂草清除,利于土壤的蓄水保墒,从而更有利于香蕉的生长。(4)机具能从一定程度上解决传统耕作方式对热带香蕉园的影响,为香蕉地保护性耕作技术研究提供技术支持。
猜你喜欢
数学小灵通(1-2年级)(2020年9期)2020-10-27
学生天地·小学低年级版(2019年10期)2019-12-30
当代贵州(2019年41期)2019-12-13
家教世界·创新阅读(2019年11期)2019-12-10
学生天地(2019年28期)2019-08-25
作文与考试·小学低年级版(2019年7期)2019-04-17
发明与创新·小学生(2018年4期)2018-04-17
高中生学习·高二版(2017年9期)2017-10-25
发明与创新(2016年34期)2016-12-18
中国共青团(2015年7期)2015-12-17
