高速冲床肘节机构的运动特性研究*
2020-07-23 01:36李义强戴惠良张治军彭进利
机电工程 2020年7期
李义强,戴惠良*,张治军,彭进利
(1.东华大学 机械工程学院,上海 201620;2.浙江帅锋精密机械制造有限公司,浙江 嘉兴 314300)
0 引 言
高速冲床已有近百年的发展史,应用范围广泛,其传动机构从曲柄滑块机构演变为各种各样的多连杆机构,如肘节机构。
传统高速冲床多采用对心曲柄滑块机构,被广泛用于板材冲压,其滑块运动多为正弦规律[1]。肘节式高速冲床在冲压时下死点速度低、急回特性好;冲压过程产生的振动以及冲击都较小[2]。此前很多学者对冲床传动机构进行了运动特性分析。袁丁益等[3]运用ADAMS软件对多连杆压力机传动机构运动过程的特性进行了分析;蔡玉强等[4]采用联立约束法通过Matlab/Simulink对曲柄滑块机构进行了建模并仿真分析了其运动特性;GAWANDE S H等[5]对肘杆夹紧机构进行了数学建模及优化设计,并借助计算机辅助分析软件进行了受力分析;BALASUBRAMANYAM C等[6]采用闭环法对双肘杆机构的运动以及连杆长度对机构停留时间的影响进行了研究;张庆飞等[7]用解析法研究了高速冲床传动机构存在惯性力的原因;邝卫华[8]运用几何分析法对冲床滑块机构进行了动力学特性的研究。
很多学者对冲床传动机构的运动特性进行了分析,但大多数的研究是对传统的曲柄滑块机构进行分析,很少有研究人员对肘节机构进行系统研究。帅锋公司主要冲床产品为曲柄式和肘节式两种,曲柄滑块机构因其本身结构的限制,难以获得良好的冲压曲线且振动较大。为了满足企业需求,迫切需要了解肘节式传动机构的运动特性。
本研究将结合帅锋公司Best-30冲床,以肘节机构为研究对象,进行运动原理的推导验证、运动曲线仿真及影响因素探究,并实地搭建测试平台,测试下死点动态精度,获得滑块运动曲线,探究肘节机构的运动特性。
1 肘节机构理论分析
1.1 肘节机构原理分析
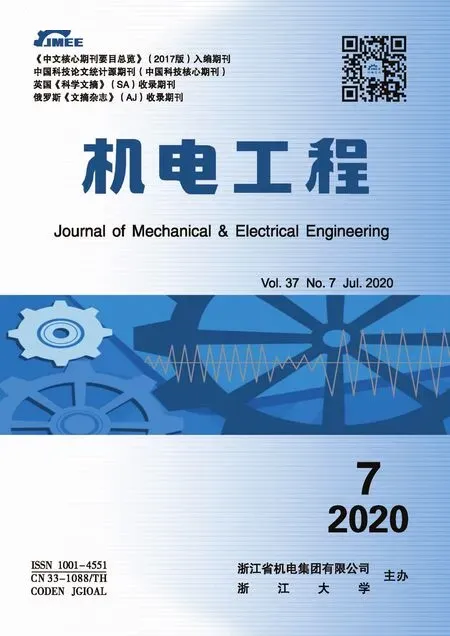
高速冲床传动机构运动简图如图1所示。
图1 传动机构运动简图r—曲柄半径;l—连杆长度;OA—曲柄半径;AB—连杆;BC,BE—上、下连杆,BC=BE;B,G—辅助滑块;C,F—动平衡块;E,H—冲压滑块;D—导柱中心距离
由图1可知,肘节机构是在横置的曲柄滑块机构基础上增加了上、下连杆及滑块。肘节机构上下、左右均对称,连杆AB与滑块B构成横置的曲柄滑块机构,通过辅助滑块B的平动带动滑块C、E竖直运动以完成冲压过程。
1.2 位移、速度、加速度方程
设OA角速度为ω,AB、BC、BE的长度为L1、L2、L3,OA、AB、BE的角位移为φ1、φ2、φ3,其中:φ1—角速度ω的旋转角位移。

(1)
(2)
式中:XB—辅助滑块B的水平位移。

(3)
即滑块E的位移SE、速度vE、加速度aE分别为:
(4)
(5)
(6)
肘节机构滑块的运动参数SE、VE、aE都是φ1的函数,满足关系式Y=f(φ1),所以给定曲柄角位移φ1的大小,将D/2、L1、L2、L3代入即可得滑块位移、速度、加速度。
1.3 静力分析
曲柄转动时,运动构件的惯性力(力矩)都较大,需要进行受力分析。
笔者依据达朗贝尔原理对肘节机构各部件进行动态静力学分析,机构各部件静力分析图如图2所示。

图2 机构各部件静力分析图F1,2ax,F1,2ay,F1,2bx,F1,2by—曲柄在x、y轴上力的分量;Md—平衡力矩;m1—曲柄质量;F2a,IIIax,F2a,IIIay,F1,2ax,F1,2ay,F2b,IIIbx,F2b,IIIby,F1,2bx,F1,2by—连杆作用力在x、y轴上的分解力;m2a,m2b—连杆质量;F2a,IIIax,F2a,IIIay,FIIIa,3ax,FIIIa,3ay,FIIIa,4ax,FIIIa,4ay,F2b,IIIbx,F2b,IIIbay,FIIIb,3bx,FIIIb,3by,FIIIb,4bx,FIIIb,4by—辅助滑块作用力在x、y轴上的分解力;FIIIa,0,FIIIb,0,Mra,Mrb—辅助滑块所受约束反力(力矩);mIIIa,mIIIb—辅助滑块质量;FIIIa,3ax,FIIIa,3ay,F3a,IIx,F3a,IIy,FIIIb,3bx,FIIIb,3by,F3b,IIx,F3b,IIy—上连杆作用力在x、y轴上的分解力;m4a,m4b—上连杆质量;FIIIa,4ax,FIIIa,4ay,F4a,Ix,F4a,Iy,FIIIb,4bx,FIIIb,4by,F4b,Ix,F4b,Iy—上连杆作用力在x、y轴上的分解力;m4a,m4b—上连杆质量;F4a,Ix,F4a,Iy,F4b,Ix,F4b,Iy—冲压滑块作用力在x、y轴上的分量;F冲x,F冲y,M冲—冲压滑块所受冲力(力矩);F3a,IIx,F3a,IIy,F3b,IIx,F3b,IIy—平衡滑块作用力在x、y轴上的分量;FII0,Mrn—平衡滑块所受冲力(力矩);mI,mII—冲压、平衡滑块质量
考虑重力忽略摩擦力,分别对各构件进行动态静力学分析。
由图2得,各构件力平衡方程分别为:
(7)
(8)

(9)
(10)

(11)
(12)

(13)

由以上分析可得,肘节机构可列出一个方程组数与作用力数相等的33元线性方程组:
AR=B
(14)
式中:A—力(力矩)系数矩阵;R—作用力(力矩);B—惯性力(力矩)或重力等。
未知量与方程组数相等,方程有确定的唯一解,可运用Matlab求解具体的作用力(力矩)数值。
2 虚拟样机模型
虚拟样机建模包括几何模型以及各构件的约束,各零部件约束由软件直接定义,零部件形体细节部分无需完全一致,只要保证实际构件的质量、惯性属性与几何模型一致即可[9-10]。随着加工精度、速度要求的变高,分析时不能忽略弹性变形[11],因此需要对变形较大的构件进行柔性建模。
根据文献[12],肘节机构在冲压过程中连杆受力复杂,弹性变形与弯曲变形均存在,所以在分析时须将连杆视为柔性体考虑。ADAMS中柔性体是用有限的离散结点来近似表示物体自由度[13],直接运用ADAMS创建连杆柔性体模型并替换。
肘节机构模型图如图3所示。
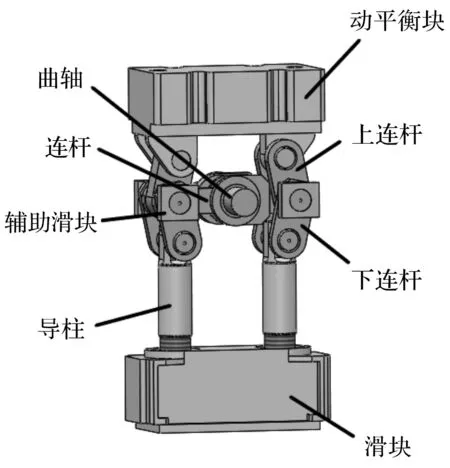
图3 肘节机构模型图
3 肘节机构仿真分析
3.1 运动学与动力学分析
本文以滑块行程25 mm,行程次数700 spm为约束条件,确定曲柄滑块机构的尺寸为:r=12.5 mm,l=137.5 mm;确定肘节传动机构的各杆件尺寸为:L1=25 mm,L2=260 mm,L3=150 mm,D=390 mm,λ≈0.1。利用ADAMS/view进行运动仿真,曲柄角速度取700 r/min,设置仿真时间为0.05 s,仿真步数为1 000步,初始位置为曲柄转角φ1等于0。
动不平衡问题是杆组机构的固有特性,对杆组末端执行机构的运动精度影响较大。因此,笔者在运动学分析基础上,设置边界条件step(360 d*time),对肘节机构各连杆进行动力学分析。设滑块质量为600 kg,忽略其余杆件质量,仅考虑竖直方向受力。
曲柄滑块机构、肘节机构运动曲线以及曲柄旋转一周各连杆的动力学分析如图4所示。
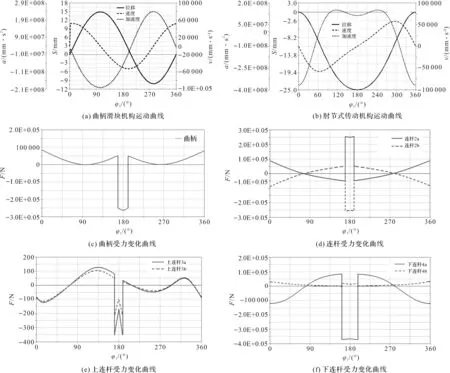
图4 肘节机构仿真分析图
高速冲床性能的优劣由滑块的位移、速度、加速度表征[14-15]。
由图4(a)可得,曲柄运动曲线基本遵循正弦规律,区别在于相位不同。滑块的最大速度值5.17×104mm/s,下死点加速度即最大加速度值为2.4×108mm/s2;速度、加速度曲线呈周期变化,无急回特性。
由图4(b)可得,在相同条件下肘节机构有明显的急回特性,去程与回程角度比为2 ∶1。下死点速度变化缓慢,最大速度为5.86×104mm/s,最大加速度为3.68×108mm/s2,下死点加速度为1.13×108mm/s2,相比曲柄机构速度幅值增大了13.34%,下死点加速度值减小了52.92%。
由图4(c~f)可得,当曲柄转角在160°~ 200°范围时,即滑块在下死点附近时,机构中各杆件受力突变且幅值最大。曲柄力值为2×105N;两连杆力值约为2.5×105N;两上连杆力值存在突变,峰值分别为200 N,400 N;两下连杆受力相差较大,峰值分别为3.5×105N,0.3×105N。
分析各杆件受力情况,其中连杆受力波动最大,较易损坏;下连杆中的轴向力波动明显,力值相差较大,表明载荷主要作用对象是下连杆。因此应注意与下连杆相连接的滑块导柱的强度问题。
3.2 影响因素分析
高速冲床曲柄的半径、转速对滑块的运动特性有直接的影响,因此有必要对其展开研究。
Best-30冲床的行程等于曲柄半径,当曲柄半径分别取值15 mm、20 mm、25 mm、30 mm、35 mm时,得到不同曲柄半径滑块的运动曲线。
Best-30冲床曲柄最大转速为1 200 r/min,考虑到设备使用寿命,实际冲压速度应在最大速度的80%以内,即不超过960 r/min。在速度允许范围内以25 mm行程冲床为例,笔者选取500 r/min、600 r/min、700 r/min、800 r/min、900 r/min 5种工作转速进行分析。
曲柄半径、转速对滑块运动影响分析曲线如图5所示。
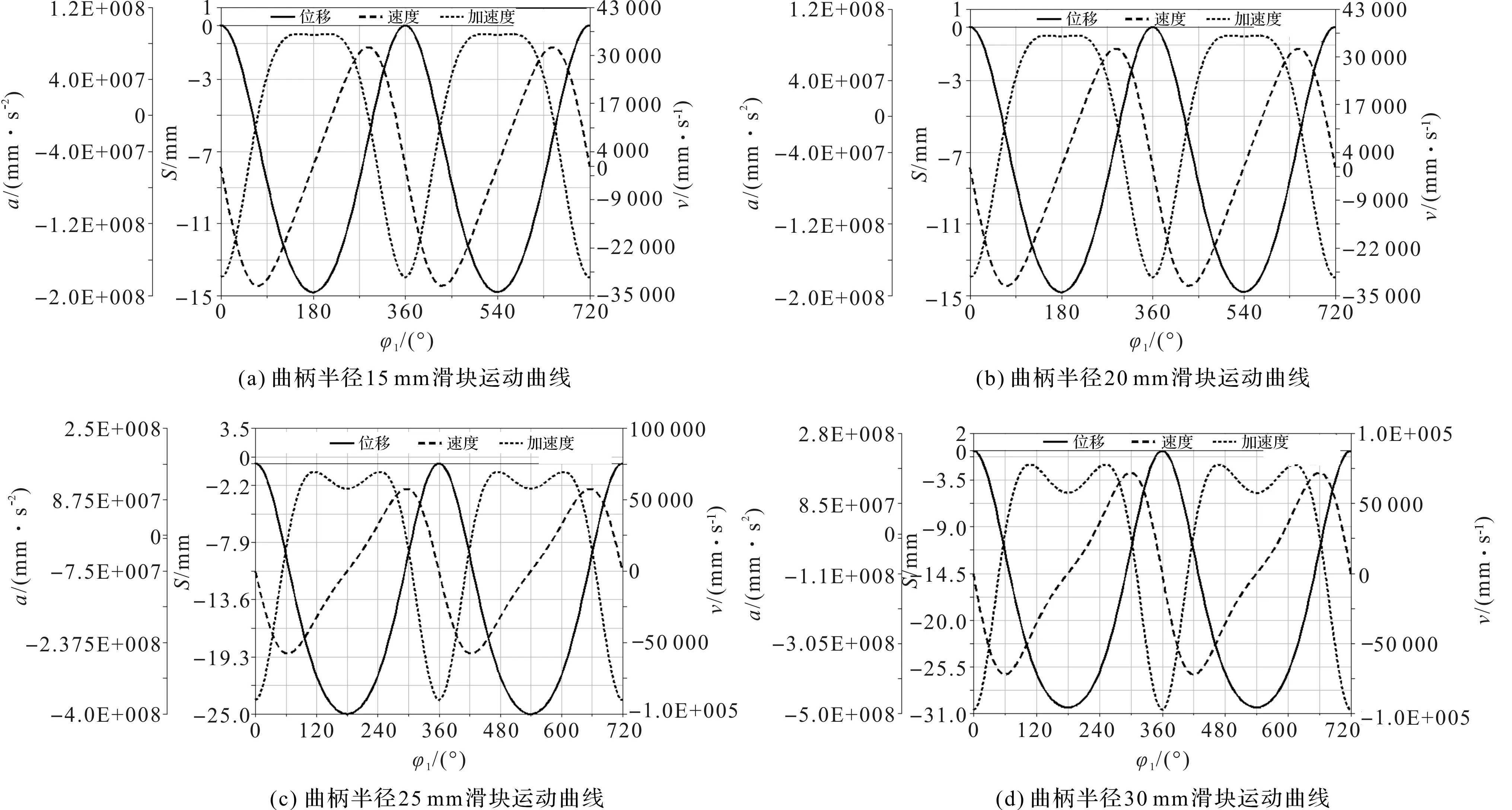

图5 曲柄半径、转速对滑块运动影响分析曲线
由图5(a~e)可得,随着曲柄半径增加,滑块行程不断增大且与曲柄半径相等,滑块位移曲线的底部逐渐隆起即表明下死点的冲压精度有所降低;滑块速度、加速度波动变大,曲柄半径为35 mm时,速度波动最大,下死点加速度降幅也最大。
由图5(f~h)可得,随着速度增大,位移曲线开口有微小紧缩,运动误差有所增大,与理想状态相比,位移误差分别为0.017 mm、0.019 mm、0.020 mm、0.022 mm、0.025 mm。
当曲柄转速增大,下死点附近速度曲线的斜率越来越大且速度、加速度峰值也变大,速度峰值增长率均在13%以上,加速度峰值增长率在22%以上,下死点加速度增长率在20%以上。在相同周期内,速度、加速度的最值之差逐渐变大,下死点加速度值先下降后上升的趋势越来越明显。
4 试验及结果分析
4.1 测试平台的搭建
本文用微米级带表卡尺调平冲压滑块,测试仪器为日本理研RM-72型检测仪,传感器为RS-833H。通过自制夹具将测试探头、传感器固定在工作台上。冲压运动带动滑块进行上下运动,通过探头和传感器之间的距离变化来表征下死点变化。
4.2 结果分析
下死点动态精度测试结果如图6所示。

图6 下死点动态精度测试图
从图6(a~b)中可以看出:冲床低速运转达到热平衡后,以恒定速度900 r/min运行3 h,加温加速状态下死点的长时位置误差为15.374 μm,瞬时动态精度为1 μm。
从图6(c~d)中可以看出:冲床恒速700 r/min、恒温25 ℃运行2 h后,达到热平衡,恒温恒速状态下死点的长时位置误差为7.881 μm,瞬时动态精度为1 μm。
从图6(e~f)中可以看出:冲床恒温25 ℃、速度为100 r/min状态下运转至热平衡状态,分别以500 r/min,600 r/min,700 r/min,800 r/min,900 r/min速度运转不低于5 min,恒温加速状态下死点的动态精度为26.111 μm,瞬时精度为4 μm。3种状态的下死点精度允差均满足GB/T29548-2013中规定的精密等级冲床的要求,这表明肘节式高速冲床具有较好的运动特性,具有较高的零件加工精度,符合设计需求。
下死点精度允差值如表1所示。
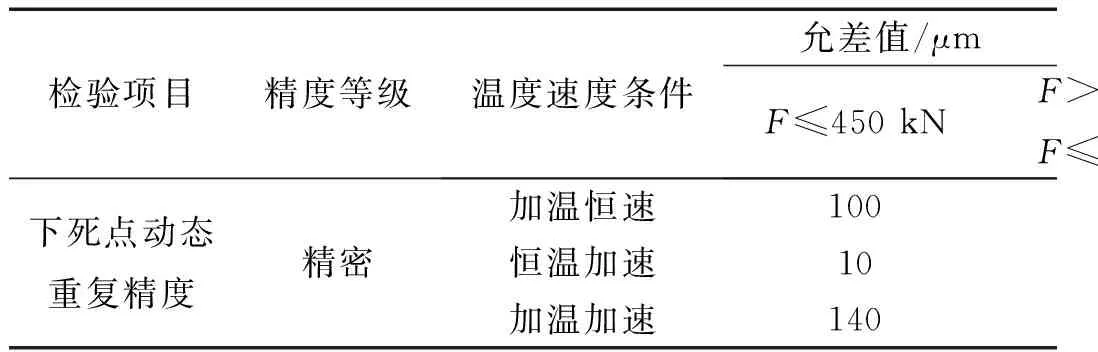
表1 下死点精度允差值
滑块运动曲线图是通过下死点测试仪器获取的数据分析整理而成。
对比图4(b)与图6(g)得,滑块位移为24.984 mm,与理论位移25 mm的误差为0.016 mm,吻合度为99.94%;滑块的最大速度值约为5.69×104mm/s,与仿真结果相差700 mm/s,吻合度为98.78%;最大加速度值约为3.63×108mm/s2,下死点加速度值约为1.15×108mm/s2,分别与仿真结果相差5×106mm/s2和2×106mm/s2,吻合度分别为98.64%和98.26%。
这表明了高速冲床肘节机构的设计合理性,也验证了仿真结果的正确性。
5 结束语
本研究采用杆组分析法及静力分析法推导肘节机构的运动方程和杆件受力情况,运用ADAMS软件对其进行了运动学和动力学分析,并通过测试数据对仿真结果进行了验证。
研究结果表明:
(1)与曲柄滑块机构相比,肘节机构运动规律更理想,急回特性更好,回程时间约为去程时间的1/2;其在下死点附近的速度波动更小、加速度值下降约52.9%,下死点的停留时间更长,冲压稳定性更好;
(2)肘节机构的曲柄半径、转速过小或者过大,都会导致滑块运动特性变差,在设计或使用时应合理选取;
(3)肘节机构的测试结果与仿真结果吻合度在98%以上,下死点精度达到精密级冲床允差的要求。
猜你喜欢
设备管理与维修(2021年17期)2021-11-02
设备管理与维修(2019年22期)2019-12-19
模具制造(2019年3期)2019-06-06
制造技术与机床(2018年10期)2018-10-13
——参观CCMT2018成形展品有感
金属加工(热加工)(2018年5期)2018-05-30
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年12期)2017-02-02
中南大学学报(自然科学版)(2016年2期)2017-01-19
铁道通信信号(2016年10期)2016-06-01