
基于Solidworks 的棘轮机构运动仿真
2020-08-03 08:22陈菲菲马红月
石家庄铁路职业技术学院学报 2020年2期
陈菲菲 马红月
(石家庄铁路职业技术学院 河北石家庄 050041 河北轨道运输职业技术 河北石家庄 050001)
1 引言
棘轮机构是由棘轮和棘爪组成的间歇运动机构,在机械设备中一般用于转速低和间歇转动的装置中,应用范围广泛。如牛头刨床的横向进给机构、自行车后轴的齿式棘轮超越机构、防逆转棘轮机构等等[1]。Solidworks 是专门用于对三维零件进行建模并进行虚拟装配。可以准确的建立各种复杂的实际仿真模型,其中Solidworks 的运动分析可以精确的仿真机构的运动,Solidworks 中的Simulation Simulation 动力学和运动模拟分析插件可以对机构进行动态模拟和分析,掌握各部件在力和运动条件下的运动及力学情况。
2 棘轮建模
在Solidworks 中安装迈迪工具插件,运行迈迪设计宝,选择迈迪棘轮设计工具,在迈迪设计宝中棘轮和槽轮机构已经参数化,极大的提高了设计的效率,选择齿数24,模数5,齿宽系数5 的棘轮机构,棘轮机构设计工具如图1 所示。参数确定之后,单击确定就可以在Solidworks 生成棘轮的三维模型,棘轮三维模型如图2 所示
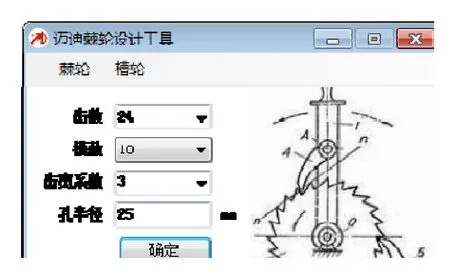
图1 棘轮参数
3 棘爪和主动摆杆建模
确定棘轮机构的基本模型之后,建立棘爪的三维模型,首先在草图中绘制小棘爪的二维图,小棘爪的具体尺寸和三维模型如图3 所示,大棘爪的具体尺寸和三维模型如图4 所,主动摆杆的具体尺寸和三维模型如图5 所。
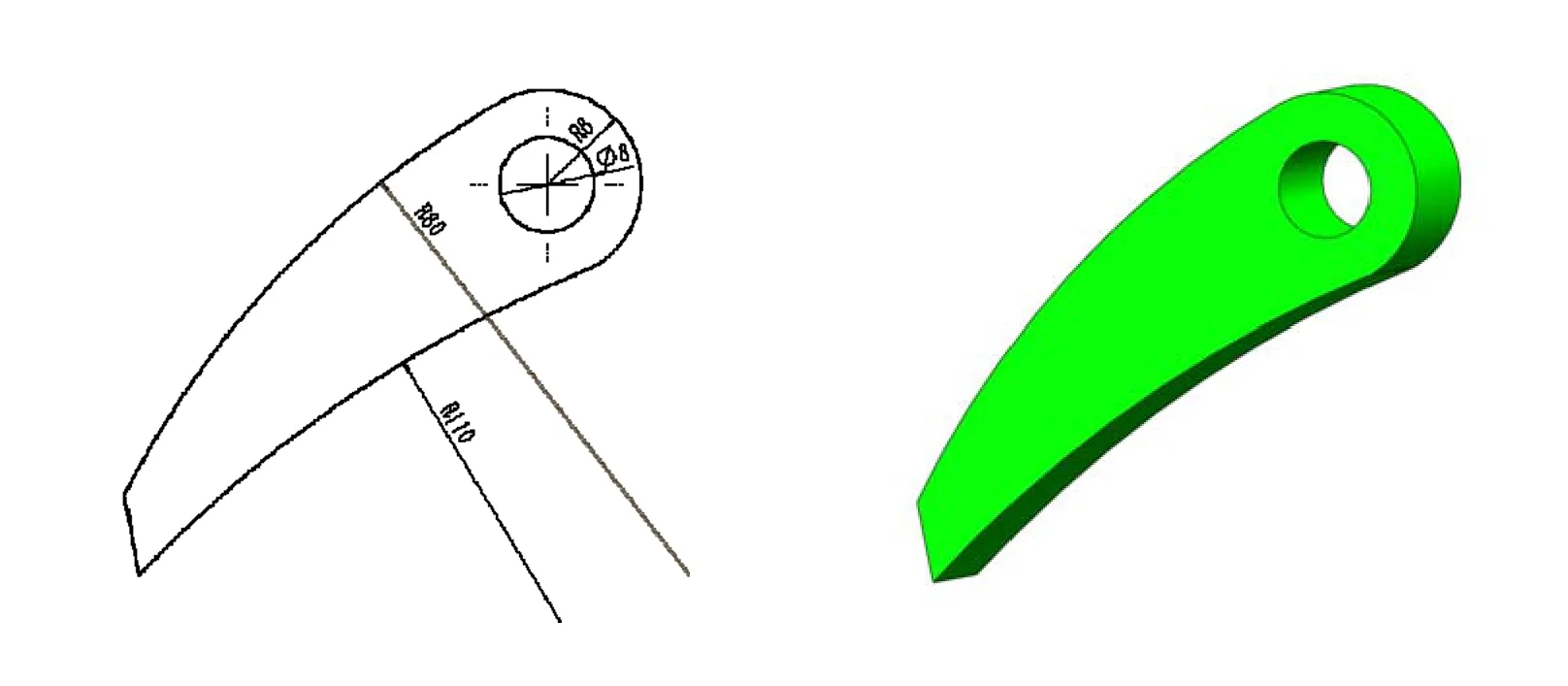
图3 小棘爪二维及三维模型
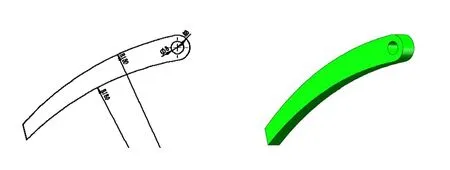
图4 大棘爪二维及三维模型
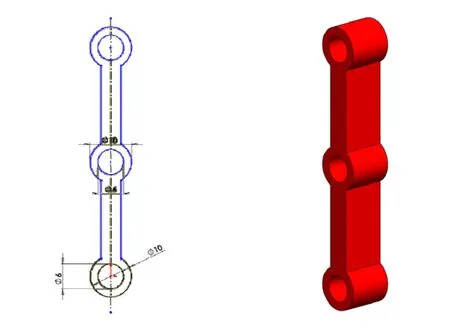
图5 主动摆杆二维及三维建模
4 棘轮棘爪装配
所谓的“装配”就是根据已经制定的技术要求,将棘轮棘爪各个零部件组装在一起,使之称为完整模型的过程[2] .再完成了棘轮机构各个零件建模后,进行棘轮的装配,装配结果如图6 所示,具体步骤如下。
(1)在SolidWorks 新建“装配体”,插入一个零部件,其中,第1 个插入的零件为整个装配体的基础,且SolidWorks 软件默认其为固定零件[3]。
通过分析单缸棘轮机构的运动关系,首先插入棘轮机构的转轴件机架。
(2)采用重合、平行、同轴等配合关系,依次插入棘轮、棘爪、主动摆杆和主动摆杆转轴,这五个零件进行装配。
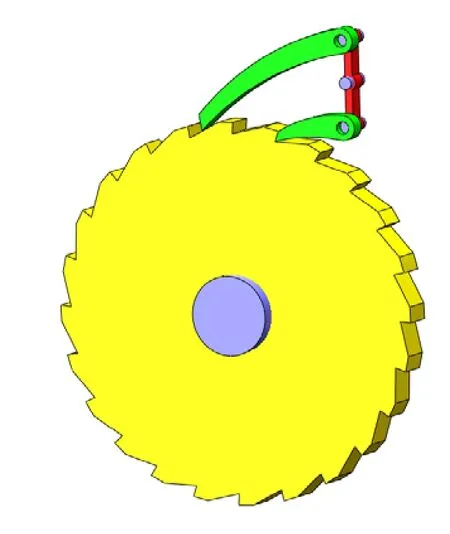
图6 棘轮机构装配图
5 棘轮机构运动仿真
单击布局选项卡中的“运动算例1",因为棘轮机构中棘爪做往复摆动,因此选择运动仿真中的“基本运动”,第一步:为棘轮机构添加正确的“马达”参数,单击“马达”按钮,对“马达”属性管理器进行参数设置,需要配置的参数如图7 所示,马达的转动方向和位置如图8 所示,棘轮机构主动件做往复摆动, “马达”的运动形式选择为“数据点”样式。
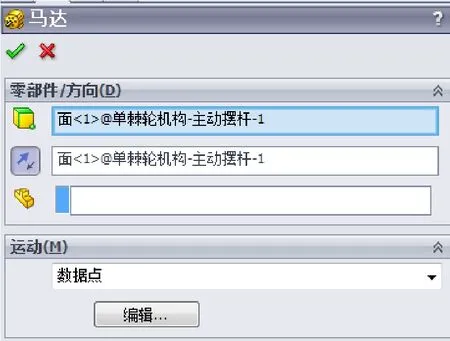
图7 马达参数配置
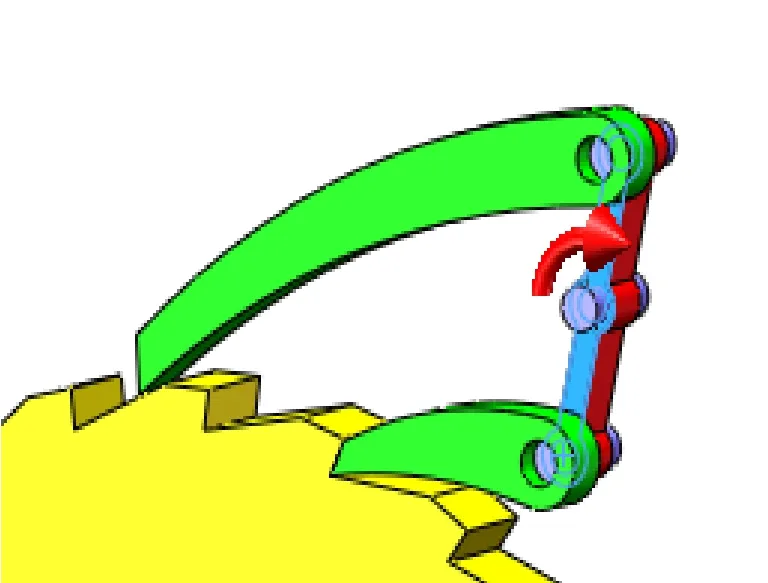
图8 马达的转动方向和位置
点击“编辑”按钮对“马达”的具体参数配置,如图9 所示,选择数据点样式,对位移参数进行选择,经计算摆杆的摆动角度为16°,马达的运动时间选择为6s 即可,速度位移曲线如图10 所示。
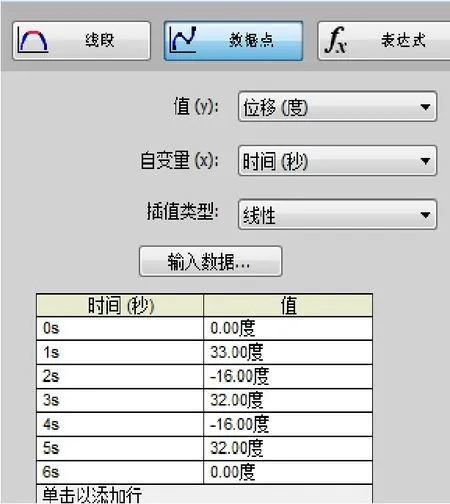
图9 马达参数
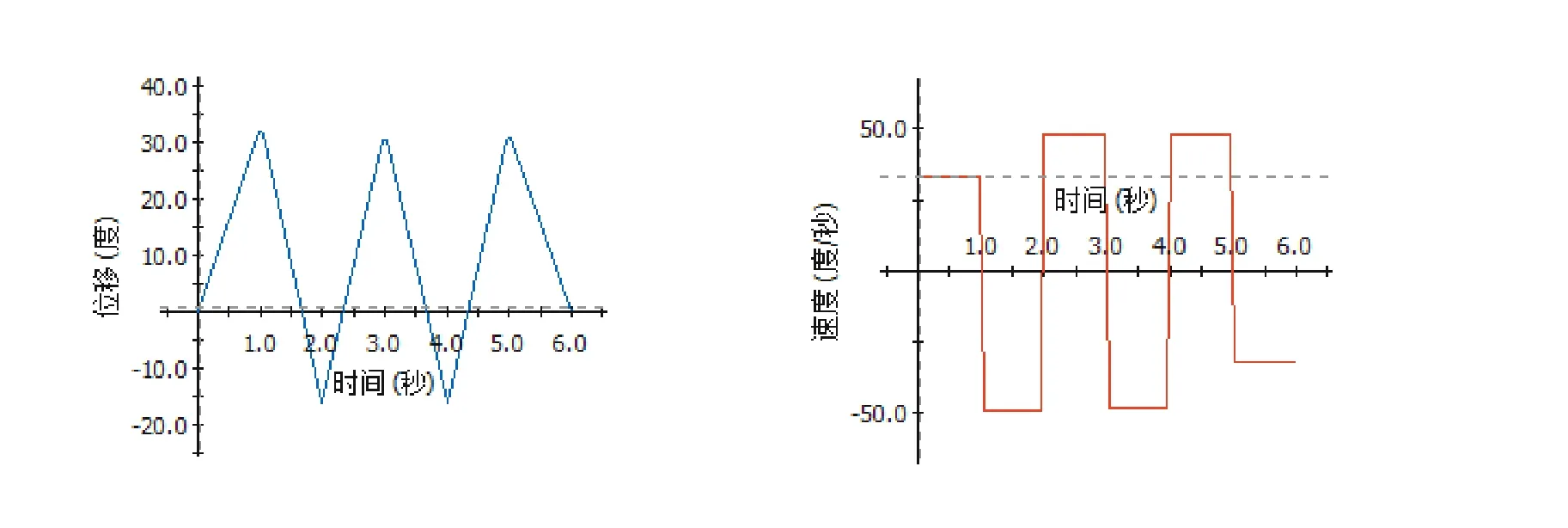
图10 马达运动曲线
为增加运动的真实性,棘轮与棘爪之间需要选择实体接触,在运动仿真中选择基本运动,为整个机构添加重力,添加结果如图11 所示,所有配置完成后点击“运动算例计算”即可完成棘轮机构的运动仿真。
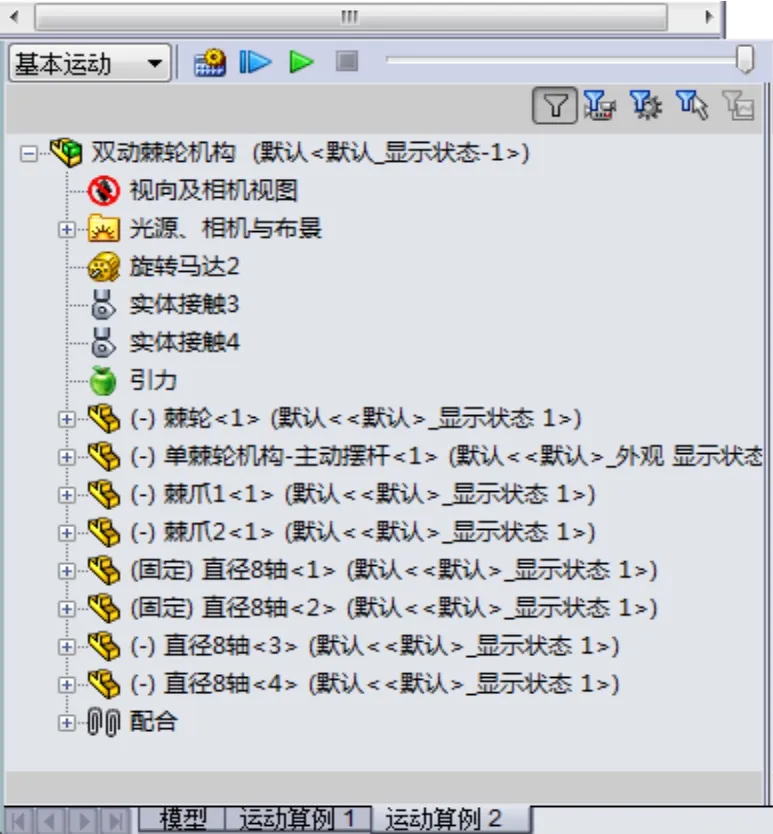
图11 基本运动配置
6 结论
在实际工作中,工程技术人员可以通过修改棘轮机构的关键尺寸,即可得出不同的运动结果参数,再结合相关的力学仿真结果,所求解出的参数为该机构的应用提供了理论依据。[4]通过这些参数可以设计出最为优化的机构模型。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
航空发动机(2021年1期)2021-05-22
东北大学学报(自然科学版)(2021年1期)2021-01-15
少儿科学周刊·少年版(2020年9期)2020-03-04
塑料包装(2019年6期)2020-01-15
电子技术与软件工程(2019年18期)2019-11-18
科学导报·科学工程与电力(2019年17期)2019-10-21
设备管理与维修(2019年14期)2019-06-16
大众汽车(2019年1期)2019-04-24
现代机械(2018年5期)2018-11-13
