
T?S模糊模型在单级倒立摆中的控制研究
2020-08-03 07:58朱嵘涛陈希湘
现代电子技术 2020年8期
朱嵘涛 陈希湘


摘 要: 文中主要研究单级倒立摆的模糊控制,首先根据单级倒立摆数学模型和T?S模糊规则,采用三角隶属函数实现对倒立摆摆角的模糊化,接着对T?S模糊控制器的方法作了具体介绍,并给出T?S模糊系统稳定的判定依据,即线性矩阵不等式,然后运用YAPLMI工具箱对线性矩阵不等式求解出控制器的增益,最后采用并行分布式补偿的方法设计出单级倒立摆的T?S模糊控制器,并对两种模糊规则的控制器进行了深入对比研究。实际测试结果表明,8条模糊规则的控制器在角速度最大值和盲区控制上的表现都优于4条模糊规则的控制器,且能在不超过2.3 s时间内实现对倒立摆角度和角速度的有效控制,因此在相应的控制领域应优先采用8条模糊规则的控制器。
关键词: 模糊控制; T?S模糊模型; 单级倒立摆; 系统设计; 并行分布式补偿; 仿真测试
中图分类号: TN876?34; TP242 文献标识码: A 文章编号: 1004?373X(2020)08?0179?04
Control of T?S fuzzy model in single inverted pendulum
ZHU Rongtao, CHEN Xixiang
(Yangtze University College of Technology & Enginerring, Jingzhou 434020, China)
Abstract: The fuzzy control of the single inverted pendulum is mainly studied. On the basis of the mathematical model of single inverted pendulum and T?S fuzzy rules, the fuzzification of inverted pendulum′deflection angle is realized by means of the triangular membership function. The method of T?S fuzzy controller is introduced in detail, and the criterion for judging the stability of T?S fuzzy system??linear matrix inequality is given. The gain of the controller is solved with the YAPLMI toolbox. The T?S fuzzy controller of single inverted pendulum is designed by means of the method of parallel distributed compensation, and two kinds of fuzzy rule controllers are comparative studied in detail. The actual testing results show that the performance of the controller with 8 fuzzy rules is better than that of the controller with 4 fuzzy rules in the maximum angular velocity and blind area control. It can effectively control the angle and angular velocity of inverted pendulum in no more than 2.3 s. Therefore, the controller with eight fuzzy rules should be preferred in the corresponding control field.
Keywords: fuzzy control; T?S fuzzy model; single inverted pendulum; system design; parallel distributed compensation; simulation test
单级倒立摆系统是一种特殊的单力臂机器人被控对象,是一种复杂的非线性、多变量、强耦合和快速运动的不稳定系统,也是检验新的控制理论和方法有效性的典型理想模型[1?2]。它具有线性的T?S模糊模型,采用模糊规则的方法,并利用系统局部信息和专家控制经验,可在极高精度下拟合实际被控对象,且T?S模糊系统的稳定性条件可用线性矩阵不等式的形式表达出来[3]。
1 系统整体设计
文中首先根据单级倒立摆数学模型和T?S模糊规则,采用三角隶属函数实现了对倒立摆摆角的模糊化,接着对T?S模糊控制器的方法作了具体介绍,并给出T?S模糊系统稳定的判定依据(线性矩阵不等式),然后运用YAPLMI工具箱对线性矩阵不等式进行求解,得出控制器的增益,最后采用并行分布式补偿(Parallel Distributed Compensation)的方法设计出单级倒立摆的T?S型模糊控制器,并对两种模糊规则的控制器进行了深入对比研究。
2 单级倒立摆模型
倒立摆系统的控制问题一直是控制研究中的一个典型问题。控制的目标是通过给小车底座施加一个力(控制量),使小车停留在预定的位置,并使摆不倒下,即不偏离事先设定好的角度范围[3?5]。
单级倒立摆模型公式如下:
式中:[x1]为摆的角度;[x2]为摆的角速度;l为摆长;u为加在小车上的控制输入;M和m分别为小车和摆的质量。
3 T?S模糊规则
对于具有n个变量、m个输入的非线性系统,其T?S模糊模型可用r条模糊规则来描述[6?8]:
式中:[xj]为第j个状态变量;[Mij]为第i条规则的第j个隶属函数;x为状态向量;u为控制输入向量。
根据模糊系统的反模糊定义,由模糊规则式(2)构成的模糊模型总的输出为:
式中:ωi为规则i的隶属函数,依据每条T?S模糊规则,采用状态反馈方法,可以设计出r条模糊控制规则:
根据模糊系统的反模糊化定义,针对连续非线性系统表达式(2),按照模糊规则式(4),采用并行分布式补偿的方法设计出的T?S模糊控制器为:
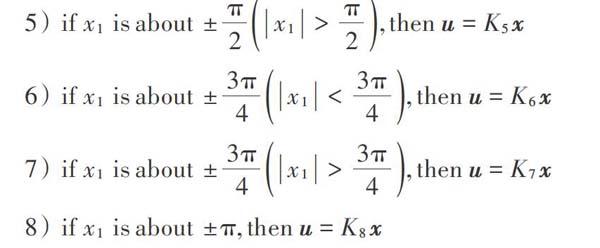
根据T?S模糊规则的式(2),可以设计出单级倒立摆的8条模糊规则:
根据单级倒立摆的8条模糊规则,采用三角形隶属函数实现对摆角x的模糊化,如图1所示。
4 T?S模糊系统稳定的判定依据
当T?S模糊系统满足线性不等式(LMI)的要求时,该T?S模糊系统能稳定运行。具体如下[9]:存在正定矩阵Q,满足下面条件时,T?S模糊系统渐进稳定:
根据式(6),可以写出基于8条模糊规则的倒立摆线性矩阵不等式。
5 T?S模糊控制器的设计
根据倒立摆的的运动情况,设计8条模糊控制规则:
采用并行分布式补偿的方法,根据式(5)设计基于8条模糊规则的控制器,具体表达式如下:
6 系统仿真测试
倒立摆模型式(1)中,通常取g=9.8 m/s2,摆的质量m=2.0 kg,小车质量M=8.0 kg,摆长l=0.5 m。根据模糊规则和LMI不等式,可以编写出对应的程序,并利用LMI工具YALMIP可求得对应的状态反馈增益,但在写程序的时候,应注意到4条模糊控制规则有3个临界值,分别是0,[π2]和[π],8条模糊控制规则有5个临界值,分别是0,[π4],[π2],3[π4]和[π],而在这些临界值中以[π2]最为特殊,因为对应的cos([π2])=0,因此在程序中不能直接取[π2],文中分别取(89°·[π180]°)和(91°·[π180°])。
在相同摆角的摆动范围下([-π],0),选取了角速度最大值、角速度上升时间和角速度下降时间三个指标,分别对4条模糊规则的控制器和8条模糊规则的控制器进行测试。4条模糊规则的角速度变化情况如表1所示,8条模糊规则的角速度变化情况如表2所示。
从表1和表2可知,两种模糊规则控制下,倒立摆的角速度都出现了控制盲区,这是一个很重要的指标,盲区越小控制效果越好,抖动强度越弱越好。这里的盲区是指倒立摆出现了失控状态,没有达到预期的控制效果,即角速度会随着时间的变化振荡衰减直至为零,但倒立摆的角度却基本不变,维持在初始角度。当倒立摆初始状态为-89.7°时就进入到盲区,4条模糊规则和8条模糊规则下的倒立摆角度和角速度曲线,分别如图2和图3所示。
在图2中角速度最大振幅为0.807 7 rad/s,在图3中角速度最大振幅为0.732 7 rad/s,因此在倒立摆角速度振荡衰减的过程中,倒立摆会不停的抖动,直至角速度为零,且4条模糊规则下的抖动强度要强于8条模糊规则。经测试,8条模糊规则的盲区为(-89.7°~-90.8°),4条模糊规则的盲区为(-89.7°~-91.1°),8条模糊规则的盲区范围小于4条模糊规则的盲区范围,且在盲区内8条模糊规则的倒立摆角速度振荡衰减效果要优于4条模糊规则。
在盲区外,4条模糊规则和8条模糊规则下的倒立摆角度和角速度曲线,从形态上看非常相似,取倒立摆的初始角度-75°进行具体分析,倒立摆的角度和角速度曲线分别如图4和图5所示。
对比图4和图5,发现在初始摆角为-75°时,8条模糊规则的角速度上升时间、下降时间和控制时间都要低于4条模糊规则,且是在8条模糊规则的角速度最大值大于4条模糊规则的角速度最大值情况之下,然后再对比表1和表2中的数据,发现在倒立摆初始角度范围在-75°~-110°之间(除去盲区),上述结论依然成立。
综合以上分析结果,基于8条模糊规则的T?S模糊控制器在以下2个方面优于4条模糊规则的T?S模糊控制器:
1) 在盲区的控制上,8条模糊规则的盲区范围要小于4条模糊规则,且进入盲区的振荡衰减效果要优于4条模糊规则;
2) 当倒立摆的初始摆角处于-75°~-110°之间(除去盲区)时,8条模糊规则的角速度上升时间、下降时间和控制时间都要优于4条模糊规则。
7 结 语
本文设计的基于8条模糊规则的T?S模糊控制器,在保障系统稳定运行的条件下,在不超过2.3 s的时间里能对单级倒立摆实现角度和角速度有效控制,该系统同时也存在较小的盲区范围,只要使控制器不在盲区工作,就能较好地应用在工业控制及其相关领域[10]。
注:本文通讯作者为陈希湘。
参考文献
[1] 辛菁,韩相帅,梁炎明,等.基于线性自适应QPSO整定的倒立摆模糊滑模控制[J].系统仿真学报,2017,29(11):2909?2910.
[2] 蔺小林,邓雄峰,李露.基于参数自适应模糊PI的三级倒立摆控制[J].控制工程,2015,22(3):404?405.
[3] 刘金琨.机器人控制系统的设计与Matlab的仿真[M].北京:清华大学出版社,2016:102?119.
[4] 孙恺,沈精虎.单级倒立摆系统的设计与仿真[J].煤矿机械,2018,39(9):8?10.
[5] 郭一军.自抗扰控制方法在单级倒立摆摆角控制中的应用[J].天津理工大学学报,2018,34(6):37?39.
[6] 李志刚,吴楠.二级倒立摆T_S模糊控制器优化设计[J].现代电子技术,2018,41(21):111?115.
[7] 隋昊覃,高峰,崔祥波,等.基于误差均值与方差最小化的鲁棒T?S模糊建模方法[J].浙江大學学报(工学版),2019,53(2):382?383.
[8] 郑晶翔,曹博,毕树生,等.基于动态T?S模糊控制的视觉目标跟随[J].哈尔滨工业大学学报,2019,51(1):178?183.
[9] 刘聪,钱坤,李颖,等.基于LMI的一体化鲁棒主动容错控制器设计[J].控制与决策,2018,33(1):53?57.
[10] 朱嵘涛,武洪涛.基于增量式PID算法的直流电机调速系统[J].仪表技术与传感器,2017,54(7):121?126.
猜你喜欢
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年22期)2016-10-18
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
企业导报(2016年6期)2016-04-21
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
电源技术(2015年11期)2015-08-22
