耕深自动测量方法分析
2020-08-04 09:35杨少奇李广宇徐峰
现代农业科技 2020年13期
杨少奇 李广宇 徐峰
摘要 通过对丘陵山地拖拉机车身调平模式和后悬挂机具横向调平模式的研究和分析,以及在研究了现有耕深自动测量方法的基础上,通过理论分析和计算,本文提出一种基于具有车身调平功能的丘陵山地拖拉机的耕深自动测量方法。丘陵山地拖拉机车身调平模式分为单侧作用和双侧作用2种形式;后悬挂机具横向调平模式也分为单侧作用和双侧作用2种形式,进行搭配组合得到4种组合工作模式。针对这4种工作模式,通过对事先在水平作业面内标定好的耕深测量公式分别进行零点修正和等效角度选用,共得到8组最终的测量公式。不仅能够满足水平作业面内的测量要求,而且还能在坡地等高作业时,后悬挂机具的横向角度调整后,通过实时采集传感器的信号即可获得实际耕深,实现耕深的自动测量。
关键词 耕深;自动测量;车身调平;悬挂调平;山地拖拉机
中图分类号 TP273;S219.85 文献标识码 A
文章编号 1007-5739(2020)13-0154-03 开放科学(资源服务)标识码(OSID)
丘陵山区地况复杂多变,地面高低起伏不定。研发具有车身调平功能的丘陵山地拖拉机,不仅能确保驾驶员的人身安全和操作舒适,而且能够提高拖拉机在山地作业的稳定性和通过性,与之配套的后悬挂系统对拖拉机车身调平、悬挂机具调平,以及实现山地拖拉机后悬挂机具对坡地的仿形作业起着至关重要的连接作用[1]。利用控制器、传感器和智能控制算法等先进仪器和技术的电控液压悬挂系统是山地拖拉机后悬挂系统发展的最佳方案[2-5]。此类后悬挂系统多采用双提升液压缸,分别调节左右下拉杆的倾角实现后悬挂农机具的横向角度的变化,从而适应丘陵山地的作业要求。邵明玺等[6]利用液压缸活塞杆位移与横向角度的函数关系,采用模糊PID控制方法,对所设计的后悬挂系统进行仿真分析和台架试验,丘陵山地地形在±15°的变化范围内,系统的调节时间和控制精度满足设计要求;蒋 俊等[7]分析了丘陵山地拖拉机后悬挂系统的液压系统的运行机理以及控制方法,并对定负载和变负载2种典型工况进行了仿真分析。
现有耕深的自动测量方法是在水平作业面内(即保证农机具的横向角度为零),基于倾角传感器,建立耕深与后悬挂系统相应运动构件的倾角之间的数学模型,从而通过实时采集运动构件与水平地面的夹角得到实时的作业耕深[8]。尹彦鑫等[9]基于深松机建立了耕深与拖拉机下拉杆倾角和深松机架倾角之间的数学模型,通过分别检测下拉杆和深松机架与水平地面的夹角来获得耕深;杜新武等[10]基于旋耕机建立了耕深与拖拉机下拉杆倾角和旋耕机架倾角之间的数学模型,耕作时通过分别检测下拉杆和机架与水平地面的夹角来获得耕深;杨少奇等[11]基于深松机建立了耕深与拖拉机下拉杆倾角和拖拉机车身俯仰角之间的数学模型,通过实时检测下拉杆和车身与水平地面的夹角来获得耕深,即使在水平作业面内出现起伏也能准确地测量耕深。然而,为了适应丘陵山地等高作业,需要对农机具进行横向调整,调整后,直接套用现有的自动测量方法,不能满足实际需要。
为此,在研究了现有耕深自动测量方法的基础上,通过对丘陵山地拖拉机车身调平模式和后悬挂机具横向调平模式进行搭配组合和分析,本文提出一种基于具有车身调平功能的丘陵山地拖拉机的耕深自动测量方法,不仅能够实现水平作业面内耕深的测量,而且還能在坡地等高作业时,后悬挂机具的横向角度调整后,实现耕深的自动测量。
1 系统结构和原理
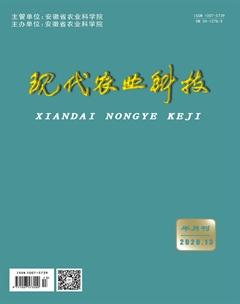
为了能在坡地等高作业过程中实现后悬挂农机具横向转角的调节,设计了一套与具有车身调平功能的丘陵山地拖拉机配套的电控液压悬挂机构,其结构示意如图1所示。
通过控制左提升油缸和右提升油缸伸缩的同时来实现挂接农机具的耕作深度调节,两侧油缸同时伸长则耕作深度增加,反之耕深变浅。左倾角传感器实时反映左提升油缸的伸缩量,右倾角传感器实时反映右提升油缸的伸缩量;利用左倾角传感器和右倾角传感器能实时监测农机具的耕作深度。当左提升油缸和右提升油缸的伸缩量一致时,悬挂农机具的横向转角为零,适应于水平作业面。为了能够适应在不同的坡面上作业,可以通过控制左提升油缸和右提升油缸的伸缩量不一致以调节挂接农机具的横向角度来实现。当左提升油缸的伸缩长度大于右提升油缸的伸缩长度时,适应于坡面角(坡面与水平面所成的夹角,逆时针为正)大于零的情况,此时面朝拖拉机的前进方向,坡面呈现左低右高;左提升油缸的伸缩长度小于右提升油缸的伸缩长度时适应于左高右低的坡面。
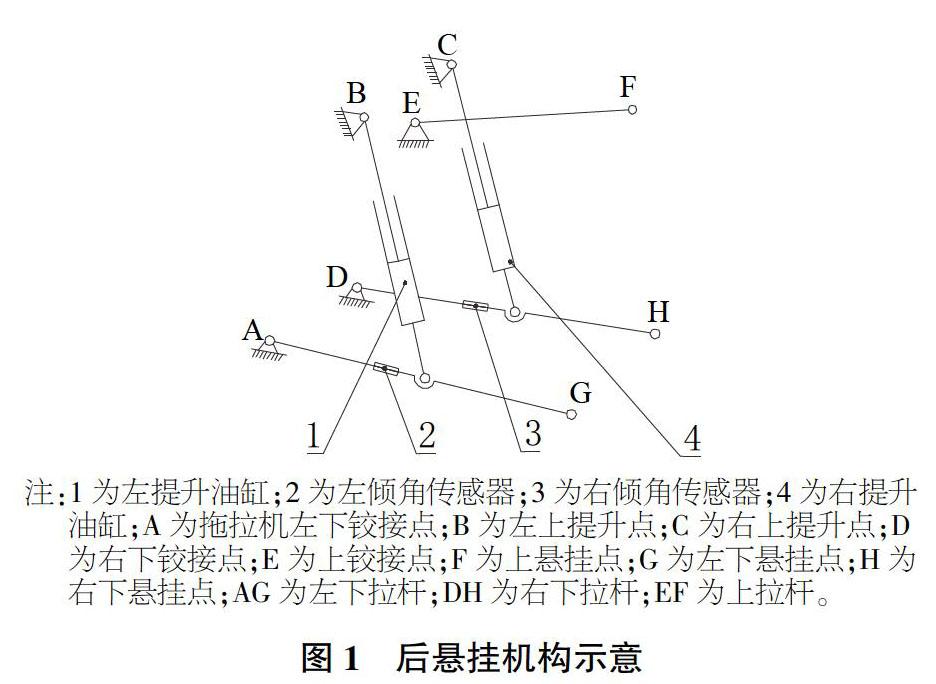
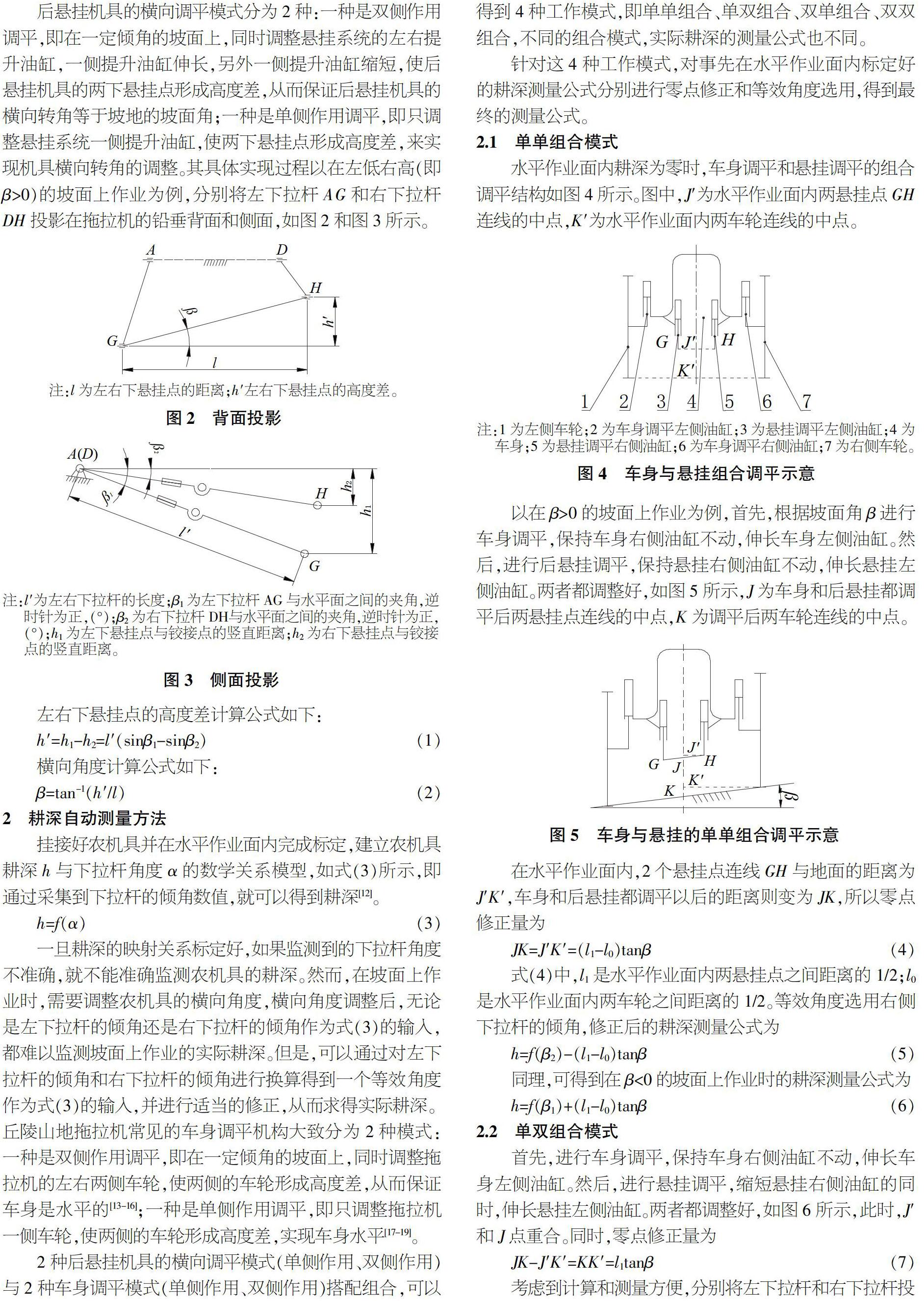
后悬挂机具的横向调平模式分为2种:一种是双侧作用调平,即在一定倾角的坡面上,同时调整悬挂系统的左右提升油缸,一侧提升油缸伸长,另外一侧提升油缸缩短,使后悬挂机具的两下悬挂点形成高度差,从而保证后悬挂机具的横向转角等于坡地的坡面角;一种是单侧作用调平,即只调整悬挂系统一侧提升油缸,使两下悬挂点形成高度差,来实现机具横向转角的调整。其具体实现过程以在左低右高(即β>0)的坡面上作业为例,分别将左下拉杆AG和右下拉杆DH投影在拖拉机的铅垂背面和侧面,如图2和图3所示。
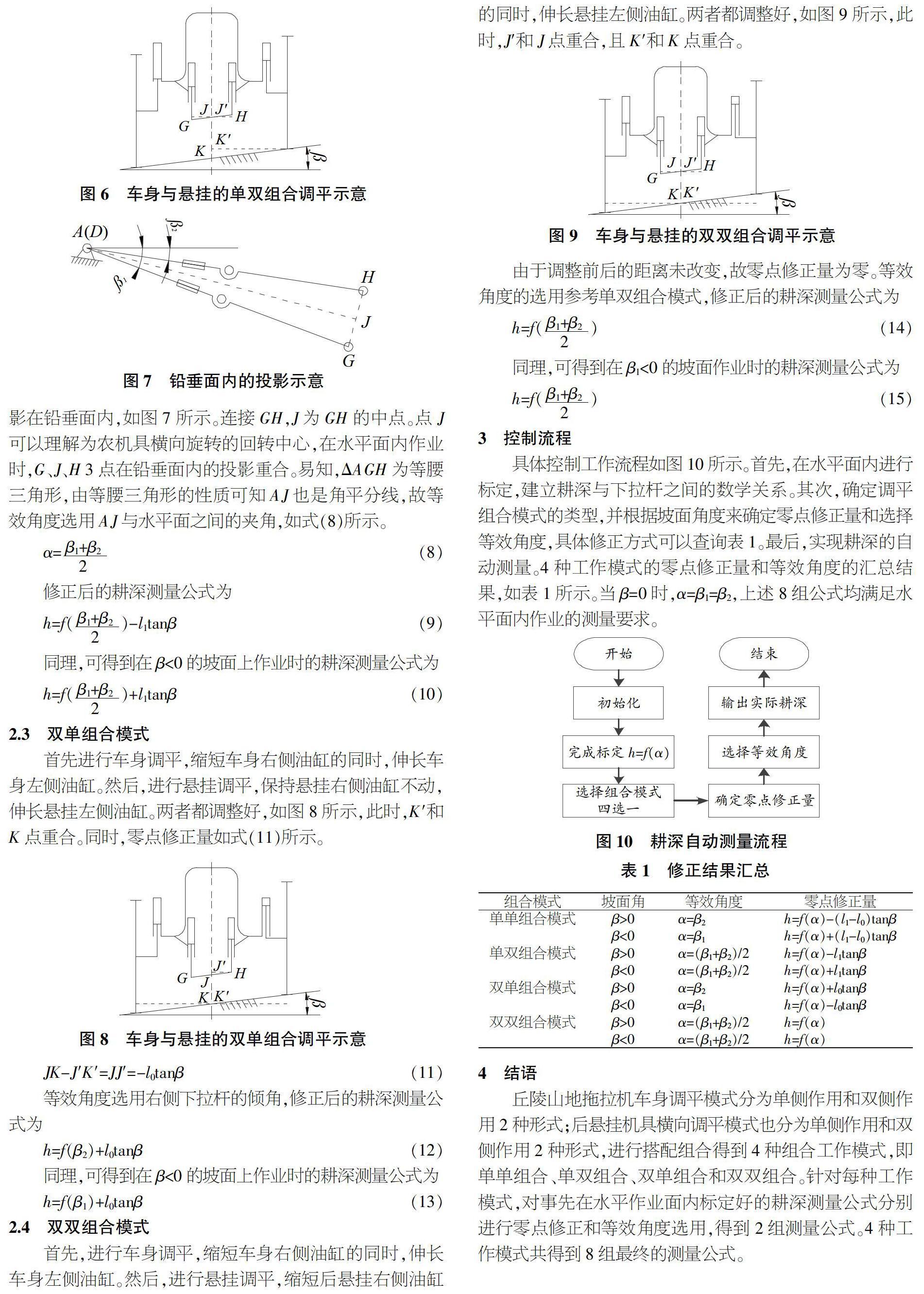
经过理论分析和计算得到这些自动测量方法,不仅能够测量水平作业面内的耕深,还能在坡地等高作业时,后悬挂机具的横向角度调整后,实现耕深的自动测量,為提高田间作业质量和作业效率提供了思路和理论参考。
5 参考文献
[1] 夏长高,杨宏图,韩江义,等.山地拖拉机调平系统的研究现状及发展趋势[J].中国农业大学学报,2018,23(10):130-136.
[2] 李玲玲,李广宇,徐峰,等.丘陵山地拖拉机后悬挂技术的应用与研究[J].农业与技术,2017,37(21):61-626.
[3] 李明生,赵建军,朱忠祥,等.拖拉机电液悬挂系统模糊PID自适应控制方法[J].农业机械学报,2013,44(增刊2):295-300.
[4] 罗锡文,单鹏辉,张智刚,等.基于推杆电动机的拖拉机液压悬挂控制系统[J].农业机械学报,2015,46(10):1-6.
[5] 杨少奇.基于BP神经网络的土壤比阻预测模型[D].长春:吉林大学,2019.
[6] 邵明玺,辛喆,江秋博,等.拖拉机后悬挂横向位姿调整的模糊PID控制[J].农业工程学报,2019,35(21):34-42.
[7] 蒋俊,张建,冯贻江,等.丘陵山地拖拉机电液悬挂系统的设计与仿真分析[J].浙江师范大学学报(自然科学版),2019,42(1):31-35.
[8] 谢斌,李皓,朱忠祥,等.基于倾角传感器的拖拉机悬挂机组耕深自动测量方法[J].农业工程学报,2013,29(4):15-21.
[9] 尹彦鑫,王成,孟志军,等.悬挂式深松机耕整地耕深检测方法研究[J].农业机械学报,2018,49(4):68-74.
[10] 杜新武,杨绪龙,庞靖,等.悬挂式旋耕机耕深监测系统设计与试验[J].农业机械学报,2019,50(8):43-51.
[11] 杨少奇,张磊,张含思,等.悬挂式深松机耕深自动测量及控制方法的研究[J].农业与技术,2019,39(24):56-58.
[12] 杨少奇,张磊,孟长伊,等.悬挂式深松机耕深监测系统的设计与试验[J].价值工程,2019,38(31):246-247.
[13] 齐文超,李彦明,张锦辉,等.丘陵山地拖拉机车身调平双闭环模糊PID控制方法[J].农业机械学报,2019,50(10):17-23.
[14] 齐文超,李彦明,陶建峰,等.丘陵山地拖拉机姿态主动调整系统设计与实验[J].农业机械学报,2019,50(7):381-388.
[15] 王涛,杨福增,王元杰.山地拖拉机车身自动调平控制系统的设计[J].农机化研究,2014,36(7):232-235.
[16] 徐峰,李广宇,高墨尧,等.一种山地拖拉机车身调平控制系统设计[J].农业与技术,2017,37(17):59-61.
[17] 彭贺,马文星,赵恩鹏,等.丘陵山地轮式拖拉机车身调平系统设计与物理模型试验[J].农业工程学报,2018,34(14):36-44.
[18] 彭贺,马文星,王忠山,等.丘陵山地拖拉机车身调平控制仿真分析与试验[J].吉林大学学报(工学版),2019,49(1):157-165.
[19] 王忠山,马文星,李洪龙,等.丘陵山地拖拉机车身调平液压系统设计与分析[J].液压气动与密封,2017,37(10):76-80.