一种轮边传动越野车辆电驱动系统设计
2020-08-06 14:42杜万亮李勇解德杰吴昊洋陈文鹏
汽车世界·车辆工程技术(下) 2020年3期
杜万亮 李勇 解德杰 吴昊洋 陈文鹏

摘 要:与集中式驱动相比,轮边分布式驱动省去了变速器、传动轴、机械差速器、半轴等部件,把电机移动到车轮侧,使其传动结构变得更为简单。本方案整车为电池与增程器并联的电驱动车辆,驱动系统、动力系统的参数需要与工况和性能指标进行匹配设计。整车控制器通过控制多个电机来实现牵引和差速,整车电磁环境复杂、对电机控制系统的动态响应要求较高。本文根据混合动力轮边分散驱动的特点,综合整车工况、轻量化和机动性要求高的需求优化系统资源配置,进行电池和增程器系统、电机驱动系统与整车性能与动力需求的匹配分析,主要完成了电机及驱动器的参数匹配、基于有限元的电磁方案优化、采用矢量控制算法提升系统的性能、采用紧凑化的电机结构和双模块的控制器机壳以轻量化、采用模块化的FlexRay通信方案,进行了电机及驱动器的样机试制和装车试验,获得良好的综合性能满足整车需求。
关键词:混合动力;分散驱动;矢量控制;有限元;FlexRay;参数匹配;轻量化
1 整车特性
1.1 整车需求
整车为四轮独立驱动轮架可调姿混合动力车辆,为满足全地形高通过性的要求,有原地转向、越野、最高速、越壕、侧倾坡行驶、越障、大坡度爬坡、松软路面、越野平均速度和续航里程等的基本功能和性能要求。原地转向、越障、越壕、爬坡工况的动力性能分析需要与车身姿态调节相匹配实现。
1.2 整车特性设计
1.2.1 牵引力计算考虑因素
根据整车动力学的仿真,进行整车阻力和动力性的分析实现整车牵引力的设计。在动力学仿真的基础上,电驱动系统的设计根据整车动力性能要求综合整车电源系统资源配置校核整车的加减速和爬坡和原地转向等工况性能[1]。
根据车辆行驶动力学理论[2],车辆行驶阻力主要分为滚动摩擦阻力、坡道阻力、加速阻力和迎风阻力,可表示为:
其中:
F-整车牵引力;f-轮胎与地面之间的滚动阻力系数;φ(f)-路面平均附着系数;ms-整车质量;α-坡道角度;δ-等效转动惯量;a-车辆加速度;CD-迎风阻力系数;A-迎风面积;v-车速。
1.2.2 牵引力及功率计算
综合考虑整车的质心和整车姿态的调节、电机负荷不均的程度、轮胎在各地面的附着能力分别进行原地转向所需牵引力和爬坡动力的计算。经计算分析,满足大爬坡度的要求时整车牵引力需求最大。
整车在越野路面满载下按越野30km/h速度并留有剩余加速度进行额定功率定额;最大功率按照满足最高车速、大爬坡基础上,综合校核整车的加减速性能、电源系统容量、制动性能和制动电阻的吸收能力等综合确定。
2 电驱动系统方案设计
综合考虑电机及驱动器的尺寸、重量限制的要求,采用紧凑化的电机结构和双模块的控制器机壳并采用铝合金材料。针对整车的低速过载频繁、过载转矩倍数大的特性[3-4],综合电机的电磁方案和矢量控制算法降低低速过载下的铜耗,改善低速过载下电机的发热;为了满足整车的静默行驶动力性能要求,优化电机与驱动器的电压设计特性并采用过调制策略保证高速的动力输出;为了满足多轮独立驱动的转矩输出的实时性要求,电机驱动器与多轮独立驱动控制器间采用模块化的FlexRay通信方案[5]。
2.1 电机电磁方案设计
基于Ansoft软件进行内置式永磁同步电机的电磁方案设计[3,6,7],利用有限元分析软件进行主要参数提取和校核各工况下电机磁负荷,采用场路结合的方法进行电机电磁方案設计。采用高磁负荷的电磁方案设计[8]。
2.2 驱动器方案设计
2.2.1 结构设计
采用两个驱动模块共用冷却水道、直流进出线及母排、薄膜电容、低压转接电路的双模块的控制器机壳。模块化的FlexRay通信板卡通过支座安装在驱动器的控制板上。
2.2.2 控制算法仿真
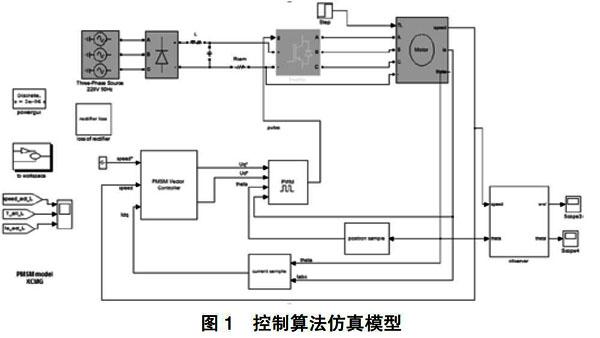
基于永磁同步电机的数学模型和转子磁场定向的矢量控制原理[9],结合电机的方案设计进行永磁同步电机及其控制算法的仿真[10],利用Simulink建立了永磁同步电机控制系统的仿真模型。
基于simulink搭建的仿真模型见图1。模型具备最大转矩电流比控制、高速弱磁控制、电压空间矢量调制(SVPWM)的基本实现方式,并考虑到高磁负荷的电机方案进行电流环PI调节器饱和的影响分析,并进行了电机磁饱和补偿的算法仿真验证。
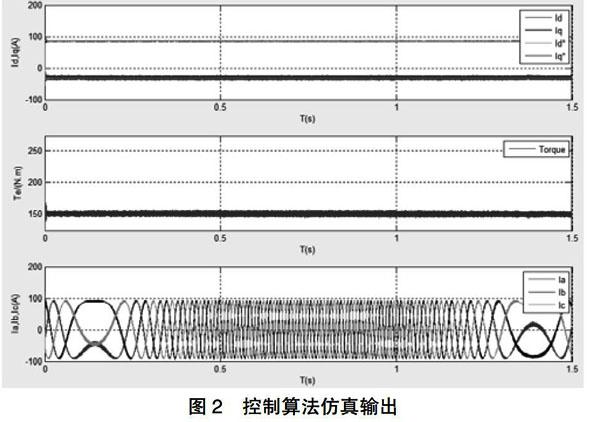
某工况整车运行下电驱动系统的仿真结果如图2。在整个过程中电机都工作在恒转矩区,采用最大转矩电流比的控制算法,仿真的电流分配与转矩输出与电机的设计相一致。
2.2.3 通信设计
为了减少电磁干扰对系统正常工作产生的影响、增加多轮独立驱动的实时性,采用新一代车载网络FlexRay代替CAN网络为多轮独立驱动与各电机驱动器的通信网络。采用模块化的设计和FlexRay通信子卡实现多轮独立驱动器与四个电机驱动器的FlexRay局部组网。利用板卡与电机驱动器实现FlexRay网络的节点通信,只需简单的读写RAM区数据就可以实现FlexRay通信,采用双通道冗余模式,接收到更新的新数据后将置相应数据位,通知用户提取数据。FlexRay总线默认波特率:5Mbps。
FlexRay子卡和外面控制器的连接如图3所示。
2.3 分散驱动的特殊要求
本项目采用多电机驱动,系统输出的功率富余量比较大,但应考虑电机的负荷不均的发热影响、因工况和轮载荷的差异需要较大的转矩输出过载倍数和驱动器的峰值电流。多轮独立驱动的防滑控制需要根据整车的工况和动力性能同电机驱动系统的转矩变化率进行配合设计和联合调试确定。因多电机驱动整车的电磁环境更复杂,整个驱动系统应考虑电磁干扰的影响,从电驱动系统抗干扰的角度,采用 FlexRay通信方式、进行旋变信号的软件滤波处理和容错设计。
3 动力系统的匹配分析
根据整车的动力性能指标进行电驱动系统和动力系统的资源配置和参数匹配设计;电机系统的输入输出功率特性应与电池及增程器的设计相匹配,纯电行驶和混合动力模式下的工况需求,应结合电机及驱动器的效率设计校核,如在大爬坡要求下需要电机系统在低速下输出大转矩,系统的损耗最大,应综合考虑与电池容量选择、持续过载放电能力、能量管理策略等相匹配。整车的热管理应与驱动系统、动力系统的冷却要求相匹配。
4 样机及试验
电机及驱动器的样机见图4。进行了样机的试验台测试和装车试验,初步试验结果满足使用需求。
5 结论
本文对所设计的电驱动系统进行了系统介绍,样机进行了试验台测试和装车试验,验证了方案设计的准确性、与电池及增程器系统的匹配,满足整机性能基本要求。
本项目配套的整车全地面通过性要求高,整车的动力性能需要电驱动系统同车身姿态调节、轮架翻转系统、结构设计等相配合实现,还需要深入结合整车资源配置和各系统的参数进行试验研究电驱动系统的性能及与各系统的匹配性,同时,需要对整车的工况和运行特点进行研究以更好地优化系统的设计。
参考文献:
[1]装甲车辆混合动力电传动技术(第二版)[M].北京:国防工业出版社,2016.
[2]马德粮.新能源汽车技术[M].北京:清华大学出版社,2017.
[3]西南交通大学电机系.牵引电机[M].北京:中国铁道出版社,1980.
[4]丁荣军,黄济荣.现代变流技术与电气传动[M].北京:科学出版社,2009.
[5]李菲,郭爱华,宋德星.基于FlexRay总线的通讯单元设计[J].电子技术,2012(10):79-81.
[6]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[7]赵博,张洪亮.Ansoft 12在工程电磁场中的应用[M].中国水利水电出版社,2013.
[8]成熹.高磁密异步牵引电机磁路计算方法[M].电力机车与城轨车辆,2010(04):15-17.
[9]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2014.
[10]黃碧霞.永磁同步电机及其控制系统的仿真研究[D].杭州:浙江大学,2008.
猜你喜欢
高教学刊(2022年13期)2022-05-24
中国应急管理科学(2022年2期)2022-05-23
课程教育研究(2021年10期)2021-04-13
汽车与驾驶维修(维修版)(2019年7期)2019-09-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
汽车工程学报(2016年5期)2017-01-16
现代商贸工业(2016年14期)2016-12-27
科学与财富(2016年29期)2016-12-27
汽车之友(2015年24期)2015-09-10