轮履臂复合结构巡检机器人移动系统研究
2020-08-12 06:48季清华白大鹏
科学技术创新 2020年21期
季清华 白大鹏
(浙江大学滨海产业技术研究院,天津300000)
1 概述
随着机械、电子、计算机、自动控制等相关学科的快速发展,机器人的智能化程度越来越高、应用范围越来越广,巡检机器人作为服务类机器人中的一种,应用前景可观,是国内外高校和科技类公司研究的焦点之一。
2 轮履臂复合结构巡检机器人移动系统方案设计
目前巡检机器人种类很多,按照移动方式主要分为腿式移动机器人、轮式移动机器人、履带式移动机器人和复合式移动机器人等。其中腿式移动机器人移动速度慢,控制难度大,轮式移动机器人复杂路况适用能力差,履带式移动机器人速度慢,续航能力差。为此,本文提出一种轮履臂复合结构机器人移动系统,结构如图1 所示,机器人移动系统主要由左右轮驱动装置、前后摆臂机构驱动装置、车轮、履带装置、链条传动装置、摆臂机构、轴、车体及控制系统组成。
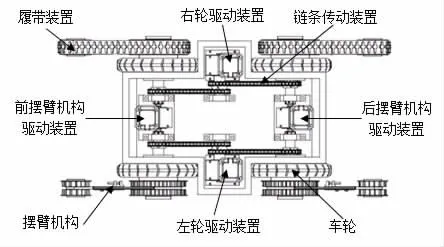
图1 巡检机器人移动系统结构图
巡检机器人移动系统的左、右驱动装置通过链条传动装置驱动车轮旋转,实现机器人前进后退,通过控制两侧伺服电机不同转速,实现机器人转弯。前、后摆臂机构驱动装置可实现机器人前侧、后侧摆臂机构的旋转运动。提出的轮履臂复合结构机器人移动系统由于其结构优势,对路况的适用能力更强。在平地面行走时,机器人主要由车轮与地面接触,可实现快速移动并大大提高续航能力;爬坡、爬楼梯、越障时主要由履带与地面接触,增加机器人整体接触面积,提高机器人复杂崎岖路面的行驶能力;在复杂路况下行驶时,摆臂结构配合使用,可大大增加机器人在爬楼梯、越障时的机动性和稳定性。
3 轮履臂复合结构机器人越障过程分析
巡检机器人移动控制系统主要由主控板、激光雷达、IMU 惯导系统、里程计传感器、驱动器、伺服电机等组成,同时控制系统内置地图。巡检机器人在自动巡航过程中,通过激光雷达实时定位,并通过与地图比对,判断行使过程中检测到的障碍物为预设障碍物或未知障碍物,对于未知障碍物,巡检机器人采用自动避障功能,通过路径重新规划实现机器人绕障。对于预设障碍物,巡检机器人采用越障功能,通过实时判断机器人与障碍物的位置关系,按照程序预设,摆臂机构在伺服电机的驱动下实时调整旋转角度,实现机器人的平稳越障,越障流程参照图2 。
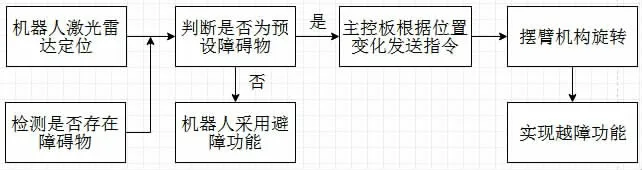
图2 巡检机器人越障功能控制流程图
巡检机器人越障过程可以大致分为5 个阶段:前履带搭上障碍物、前履带越上障碍物、前履带越过障碍物、后履带越上障碍物和后履带越过障碍物。
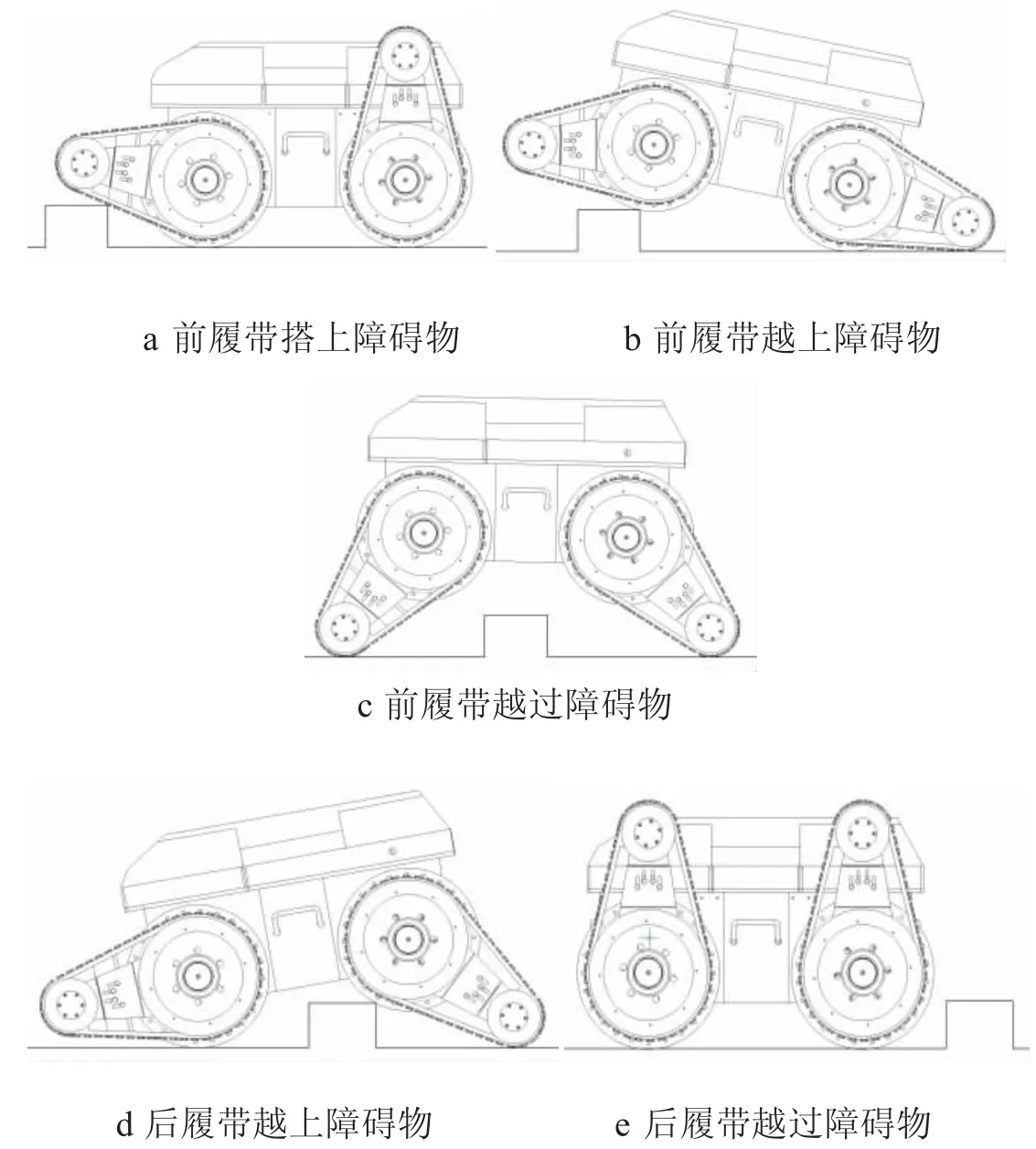
图3 巡检机器人越障过程分析
巡检机器人在越障时首先通过调整前侧摆臂机构旋转角度,使前履带搭上障碍物,机器人左右两侧驱动电机驱动机器人前履带越上障碍物,同时,后摆臂机构在伺服电机驱动下旋转,支起整个机器人,确保机器人底部不触碰到障碍物。机器人继续前进,后履带接触障碍物后,随着机器人向前行驶,后摆臂机构不断调整后履带角度,使机器人平稳越过障碍物。
4 样机试验
为验证巡检机器人在不同复杂路况下的机动性及越障能力,对设计制作的巡检机器人移动系统进行越障性能测试,测试用障碍物高200mm,宽150mm,如图4 所示:
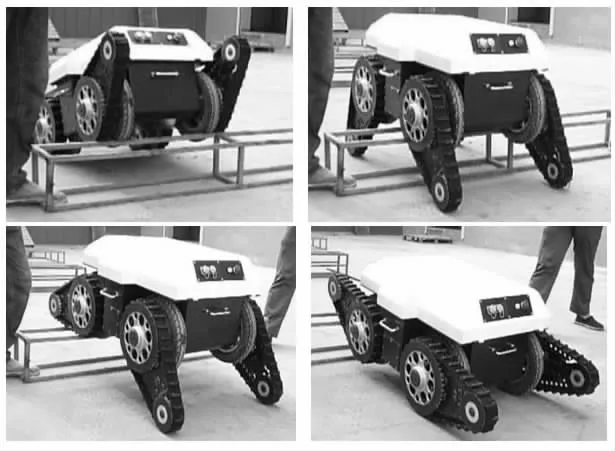
图4 巡检机器人移动系统越障功能测试
试验结果表明,机器人移动系统在摆臂机构的配合下,可平稳越过200mm 的障碍物,越障全程移动系统底部未触及障碍物。经测试,巡检机器人移动系统在平坦油漆路面最高速度可达2.5m/s,最高越障高度可达250mm。轮履臂复合结构的巡检机器人移动系统可根据路况的不同自主切换运动模式,适用多种复杂结构地形。
5 结论
本文提出了一种轮履臂复合结构巡检机器人移动系统设计方案,通过自主切换不同运动模式,可实现巡检机器人在多种复杂路况下的行驶,并具有强大的机动性及稳定性,通过搭载不同功能模块,可制作不同用途的移动机器人,具有广阔的市场前景。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
现代仪器与医疗(2021年1期)2021-06-09
兵器装备工程学报(2021年3期)2021-04-09
微特电机(2020年11期)2020-12-30
电子技术与软件工程(2019年20期)2019-11-30
电子制作(2018年17期)2018-09-28
计算机测量与控制(2018年9期)2018-09-19
电子制作(2016年1期)2016-11-07
燕山大学学报(2015年4期)2015-12-25
科技视界(2014年6期)2014-12-24