
连接器被动适应装置动力学分析
2020-08-12 12:00杨卫杰翟旺刘佳李泳峄张国栋
机械制造与自动化 2020年4期
杨卫杰,翟旺,刘佳,李泳峄,张国栋
(北京航天发射技术研究所,北京 100076)
0 引言
运载火箭(或导弹)与地面设备之间的气、液接口设备称为连接器,通常包括供配气、常规推进剂、低温推进剂连接器。实现连接器与箭上接口设备之间的自动对接(包含二次自动对接)与分离,对实现加注后发射流程可逆,提高发射场设备、人员、星箭等的安全性,缩短发射准备时间,降低劳动强度等方面具有重大意义,已成为现代运载火箭发射支持系统发展的必然趋势。
目前,自动对接技术尚处于研制阶段,国内已经拥有一定的试验基础,可以实现100mm/s的动态跟踪,跟踪精度可达毫米级,但由于其对接目标运动的特殊性,仍然没有在运载火箭(或导弹)上应用。
自动对接装置的机械结构主要由随动机构、夹持机构以及被动适应装置组成,如图1所示。随动机构是主动机构,夹持机构是中间过渡连接机构,被动适应装置在插入过程中,其被动适应偏差。本文依托于连接器自动对接装置,进行被动适应装置的设计和动力学仿真。

图 1 自动对接装置
1 装置基本结构
弹簧用于自动对接被动适应过程相对较少,本文采用的被动适应装置主要依靠14个弹簧的合理设计以完成连接器自动对接过程中的对中保持和对接适应。
被动适应装置主要有弹簧、过渡杆、过渡框、限位块、导向锥、滑轮、钢丝绳、过渡环等组成,如图2所示。在对中过程中,被动适应装置具有保持连接器与过渡框相对位置的功能;在对接过程中,被动适应装置具有被动适应跟随误差引起的位姿偏差功能。限位块起到在对中过程中的保持功能和在对接过程中的适应功能。

图2 被动适应装置
2 装置受力分析
连接器及管路质量取70kg,质心在后支点位置,附加载荷500N。对过渡框进行受力分析,所得到弹簧的参数和预紧力如图3和表1所示。

图3 过渡框弹簧设置

表1 弹簧参数
3 基于UG的动力学分析
3.1 模型简化
将模型简化为5部分:过渡框及附加连杆1,连接器及导向销连杆2,前部导向伞连杆3,右部导向伞连杆4,左部导向伞连杆5,如图4所示。

图4 对接模型简化及运动副添加
3.2 边界条件
将右部导向伞连杆4和左部导向伞连杆5固定并隐藏,在连杆3和大地之间施加升降和横移两个移动副,在连杆1和大地之间施加进退移动副,完成运动副添加。
按照真实的弹簧连接情况进行弹簧力施加。以第5个弹簧的加载过程为例进行说明。需预先设置参数L5,令其等于弹簧两处端点的测量值(跟随模型实际位置变化),在弹簧刚度系数处设置分段函数,如图5所示。设置连杆2和连杆3的接触关系。
按照匀速直线运动规律对过渡框移动副进行驱动添加,其速度设置为90mm/s,将连杆3的初始位置横向和垂向均设置为10mm[1]。
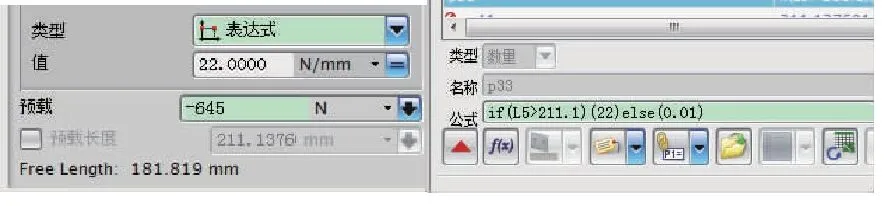
图5 弹簧参数
设定重力方向垂直向下,分析时间1.25s,分析步240步,即可进行解算[2-3]。
3.3 计算结果
设置孔销上、下、左、右分别偏差10mm,进给速度90mm/s,计算出对接过程中的驱动力曲线,如图6所示。

图6 力曲线图一
通过曲线数据分析可知,进给最大力是363.4N[4]。
4 基于LMS Virtual Lab Motion的动力学分析
4.1 模型简化
在对接机构多体系统动力学模型中,外框作为一个刚体。内环由前过渡环和后过渡环共同构成,二者是同一个刚体上的两个部分。14根弹簧全部由软件中的弹簧单元模拟。每个弹簧在使用过程中都有预拉伸和收缩限位,由于收缩限位的存在(图7),每个弹簧在预拉伸状态下,如果继续被拉伸则其功能与正常弹簧完全一样,如果有收缩趋势则其提供的拉力立刻降为0。为了模拟弹簧这一使用特点,所有弹簧被定义为非线性弹簧,弹簧特性曲线如图8所示,初始时刻各弹簧的预拉力见表1。

图7 弹簧限位

图8 弹簧特性曲线
4.2 边界条件
2个插销及2个销孔都作为单独的刚体,插销通过焊接铰与前过渡环固定连接,在销与销孔间定义接触力单元用于模拟二者间的接触与碰撞,接触力的计算基于赫兹接触理论,销与孔间的接触参数见表2,完整的多体动力学模型如图9所示[5]。

表2 销、孔接触参数
4.3 计算结果
数值仿真主要模拟对接过程中销、孔错位时二者间的相互作用(图9)。设置孔销上、下、左、右分别偏差10mm,进给速度90mm/s,仿真结果如图10所示,通过曲线数据分析可知,进给最大力是393N。

图9 动力学模型

图10 力曲线图二
4.4 结果对比
通过UG Motion仿真得到的进给驱动力为363.4N,通过LMS Virtual Lab Motion仿真得到的进给驱动力为393N,两种软件的仿真结果基本一致。因LMS Virtual Lab Motion过程考虑了摩擦,其仿真过结果更符合实际接触、碰撞、插入情况,故确定进给驱动力取值400N。
4.5 多种工况仿真分析
进给过程中,由于目标物体与装置本身都是动态的,目前的对接跟踪技术能实现一定范围(≤10mm)的对中,故分别对销和孔采取左右、上下错位进行对接仿真,并施加不同的对接速度,其中左右对接仿真可以合为一种。
1) 销高孔低工况
该工况下,插销分别以10mm/s、30mm/s、50mm/s、70mm/s及90mm/s的速度插入销孔时,仿真插销所需的进给力,如图11-图15所示。

图11 插销所需的进给力(10mm/s)

图12 插销所需的进给力(30mm/s)

图13 插销所需的进给力(50mm/s)

图14 插销所需的进给力(70mm/s)

图15 插销所需的进给力(90mm/s)
2) 销低孔高工况
该工况下,插销分别以10mm/s、30mm/s、50mm/s、70mm/s及90mm/s的速度插入销孔时,仿真插销所需的进给力,同销高孔低工况,90mm/s插销所需的进给力最大,如图16所示。

图16 销低孔高插销所需的进给力(90mm/s)
3) 销右孔左工况
该工况下,插销分别以10mm/s、30mm/s、50mm/s、70mm/s及90mm/s的速度插入销孔时,仿真插销所需的进给力,其中50mm/s、70mm/s 、90mm/s插销所需的进给力最大,如图17-图19所示。

图17 销右孔左插销所需的进给力(50mm/s)

图18 销右孔左插销所需的进给力(70mm/s)

图19 销右孔左插销所需的进给力(90mm/s)
通过上述工况分析可知:
1) 上下偏差、左右偏差进给过程中,刚接触碰撞时,受力瞬时比较大;随着进入锥面的过程中,力逐渐减小;待进入柱段过程中,力进一步减小;最后保持相对恒定值。
2) 上下偏差进给过程中,随着速度的增加,碰撞力增加,碰撞后的曲线相对稳定。
3) 左右偏差进给过程中,随着速度的增加,碰撞力增加,受力过程基本一致。
5 试验验证
对被动适应装置的进给工况进行验证,试验过程如图20所示。进给驱动力通过调节气缸压力实现,通过实验验证得到:
气缸调整到400N的附加进给力,被动适应装置可以顺利地进入导向锥;各个弹簧参数设置合理,在对中过程中,被动适应装置可以保持状态,在对接过程中,被动适应装置可以灵活地适应。
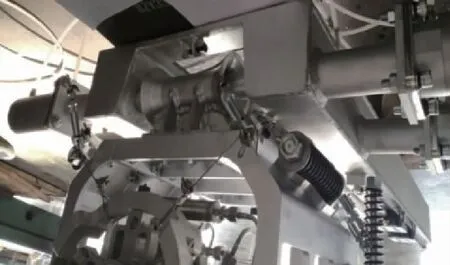
图20 装置试验
6 结语
1) 无论采取UG Motion还是采取LMS Virtual Lab Motion,仿真结果一致;
2) 对于在一阶段要求弹簧刚性,在另一阶段要求弹簧柔性的情况,可以通过分段函数进行参数设置;
3) 导向销和导向锥在相互作用的过程中需合理地设置接触参数;
4) 通过仿真,充分验证弹簧参数的正确性,并可准确地确定驱动力;
5) 通过试验,充分验证动力学仿真计算的合理性。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
天津外国语大学学报(2021年1期)2021-03-29
装备制造技术(2020年2期)2020-12-14
VOGUE服饰与美容(2020年5期)2020-09-03
趣味(语文)(2019年5期)2019-09-02
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02
汽车实用技术(2017年16期)2017-09-21
中国农资(2012年6期)2012-08-15
汽车与新动力(2012年5期)2012-03-25
