基于UWB的跟随行李箱设计
2020-08-17 09:24杨银标汪华章冯志锌王海臻杜连成
现代信息科技 2020年9期
关键词:行李箱
杨银标 汪华章 冯志锌 王海臻 杜连成


摘 要:针对目前绝大部分行李箱不够智能化的现状,为减轻出行的人因携带行李箱给双手带来的负担,提出了一种基于UWB技术的跟随行李箱设计。行李箱上的两UWB基站和跟随目标携带的UWB标签实现无线连接。标签可得到它与两基站之间的距离值,再经数学运算得到由两基站一标签构成的三角形中以基站0为顶点的角的角度值。主控根据这个角度值和标签与基站0之间的距离值来控制行李箱移动,实现行李箱的跟随功能。
关键词:UWB;跟随;行李箱;DS-TWR;电机驱动
中图分类号:TP242;TN925 文献标识码:A 文章编号:2096-4706(2020)09-0029-04
Design of Following Suitcase Based on UWB Technology
YANG Yinbiao,WANG Huazhang,FENG Zhixin,WANG Haizhen,DU Liancheng
(College of Electrical & Information Engineering,Southwest Minzu University,Chengdu 610225,China)
Abstract:In view of the current situation that most of the luggage is not intelligent enough,in order to reduce the burden of carrying luggage to the hands of travelers,proposes a design of following luggage based on UWB technology. The two UWB base stations on the luggage and the UWB tags carried along with the target realize wireless connection. The distance value between the label and the two base stations can be obtained,and then the angle value with base station 0 as the vertex in the triangle composed of two base stations and one label can be obtained by mathematical calculation. According to this angle value and the distance between the label and the base station 0,the master control controls the movement of the suitcase to achieve the following function of the suitcase.
Keywords:UWB;following;suitcase;DS-TWR;motor driver
0 引 言
在科技迅速发展的今天,关于自动跟随的研究已经非常火热,自动跟随在很多方面很大程度上减轻了人的负担。跟随购物车无需人力拖运,有效提升了消费者的购物体验[1];自动跟随服务机器人在出行的时候可自动跟随主人,为主人提供提行李、拎包、撑伞等服务[2];自动跟随高尔夫球车则可自动跟随目标,帮助人们运送工具和物品[3]。目前,也有不少学者对跟随行李箱进行研究,部分公司已经做出了产品,相信在不久的将来,克服种种困难之后,跟随行李箱也会像智能手机一样普遍。本文依托于大学生创新创业训练计划项目,对采用两UWB基站一UWB标签方案时基于DS-TWR测距的UWB定位方法、行李箱实现对目标定位后的跟随方法、较大功率直流电机驱动电路等进行了研究和实现。
1 系统总体设计
此系统的系统框图如图1所示,可分为两个小系统,分别是由两基站一标签构成的UWB定位系统和STM32控制电机的控制系统。UWB定位系统中基站和标签选用的是蓝点无限科技的UWB模块,模块的硬件电路是一样的,其作为基站还是标签由软件编程来确定。控制系统中STM32微处理器选用的是以STM32F103C8T6芯片为核心的最小系统板;为加深对较大功率电机驱动电路的理解,选用了自制的电机驱动板;电机选用了24 V的直流减速电机;为便于实验,行李箱采用的是搭建的简易结构模型。关于系统供电,UWB标签使用5 V输出的充电宝单独供电;行李箱上采用了5 Ah 24 V的锂电池作为电源,24 V电源直接给电机驱动板供电,STM32微处理器和两基站则由24 V经LM2596降压模块降压后的输出供电。
在系统上电之后,UWB模块的测距任务便可启动,两基站先各自得到它们与标签之间的距离值,然后把距离值通过射频发送给标签;而基站0與基站1固定在行李箱上,它们之间的距离在手动测量之后写入标签对应的程序中,标签由此可以得知由两基站一标签构成的三角形三边的距离,标签根据余弦定理,可求出任意一个角的角度值。在此系统中,选取了标签到基站0之间的距离和以基站0为顶点的角的角度值作为行李箱跟随的依据,当距离值大于程序中的设定值,行李箱便可启动;针对角度值则设定角度区间,使行李箱在不同区间分别执行前进、左转、右转等动作。而行李箱应该执行的动作是在标签的程序中写好的,只不过是以单个字符表示,字符通过射频从标签传给基站0,基站0又通过串口传给了主控(STM32微处理器),主控根据接收到的字符控制电机执行不同的动作,从而实现行李箱的跟随功能。
2 行李箱结构设计
在设计前期,为对行李箱结构进行探索,采用木板和瓦楞纸板等材料搭建结构进行实验,在最后确定了如图2所示的行李箱结构。为方便主控和电机驱动等在行李箱底板放置,行李箱的底部设计成不可分开,而是采用侧面打开的方式。行李箱底部安装了四个轮子,前面两个为驱动轮,后面两个为万向轮,使两个驱动轮有合适的速度差即可实现转向,同时为使行李箱转向更灵敏,采用前驱的方式。在手动模式下,人可以通过拉杆来移动行李箱。两基站在行李箱上的安装位置也如图2所示。
3 UWB定位系统
UWB无线定位技术具有功耗低、抗多径效果好、定位精度高(10 cm左右)等优势,已在众多定位技术中脱颖而出[4]。UWB定位需要基站的搭建,基站和标签的数量视系统类型而定。本文选择了较为简单的两基站一标签方案,并且用基于测距的方法确定标签位置。
3.1 UWB模块简介
该系统选用的UWB模块主要由DWM1000模块和STM 32F103C8T6芯片构成。DWM1000模块是基于Decawave的DW1000芯片设计的超宽带收发模组,包含了陶瓷天线、射频电路、时钟电路、电源管理。DW1000会发送无线信号给信号读取器,可通过计算信号传输时间来确定芯片位置,时间的长度说明了距离的远近[5]。STM32F103C8T6芯片和DWM1000模块之间通过SPI总线实现数据交换。
3.2 DS-TWR测距方法
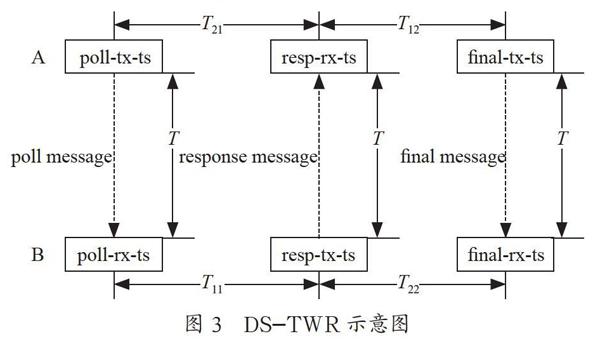
UWB模块之间距离的测量是定位的前提,其实质是ToF(Time of Flight)测距,是一种双向测距,即TWR(Two-way Ranging),它又分为单边双向测距(SS-TWR,Single-side Two-way Ranging)和双边双向测距(DS-TWR,Double-side Two-way Ranging)。DS-TWR是SS-TWR的扩展,常用的有四消息和三消息方式,该系统选用了DS-TWR测距方法,且使用三消息方式,示意图如图3所示。
这里把两个UWB模块命名为A和B,模块都有发送和接收消息的功能,把涉及的三条消息命名为poll message、response message和final message,而框内表示的是六个时间戳,tx-ts表示发送消息的时间戳,rx-ts表示接收消息的时间戳。在一次信息交换的最后,B收到的final message中包括了A记录的三个时间戳,这样B就可以通过六个时间戳(B本身记录了三个)求出四个时间差,从而可以通过下式求出消息在空中的传输时间T,传输时间乘以电磁波传输速率就可以得到A和B之间的距离。需要注意的是这种方式并不要求响应时间T11和T12一致。
3.3 测距数据的处理及标签位置的确定
在该系统中,先使基站0和基站1各自得到它们与标签之间的距离,然后使它们分别把距离信息发给标签,多次测距后,在标签中对距离数据进行处理。我们先对多次距离取平均值,再进行滤波处理。滤波是为了防止较大波动的出现,此次设计选取了较容易实现的中值滤波。该滤波方法需要为每个基站设置一个独立的滤波器,滤波器内需要设置滤波条数n,滤波器将会对n条数据求中值。滤波器内的滤波条数越多,平滑性越好,但会使反应变慢,使得求得的坐标点跟不上实际的移动速度,为兼顾平滑性和反应速度,系统中滤波条数设置成5。
如图4所示,在测距完成后,标签可以知道a,b,c三边的长度,通过以下余弦定理公式和反三角函数公式可求出β角。基站0根据β角和a边的长度即可确定标签位置。
4 控制系统
4.1 驱动电路设计
该设计在电机选择上选择了一款直流有刷减速电机,为加深对电机驱动的理解,此次设计自制了电机驱动板,其原理图如图5所示,图中所示的原理图为实际电路的一半,另一半电路也与此图相同。该电路主要包括H桥、IR2104前置驱动、进行逻辑控制的SN74HC00N芯片。
在同一时刻,H桥中只会有两根管子导通。如果Q1、Q4導通,电机正转;如Q2、Q3导通,电机反转。H桥中的MOS管选用了IRF540N,是一种大功率的N沟道管(相比P沟道管有价格便宜等优势),其在关断条件下能承受的最高正向电压(也称耐压)V_DSS为100 V,在完全开启时所能通过的电流I_D为33 A,能够满足设计要求。此外,IRF540N这类功率MOS管的漏极和源极之间是自带二极管的,可以不再额外并联。
IR2104作前置驱动,其工作电压VCC为10~20 V,这里选取了12 V。在SD有效(SD为高)的情况下,若IN为高,则HO为高,LO为低;若IN为低,则HO为低,LO为高,即HO的输出与IN相同,而LO的输出与IN相反(这里IN为输入,HO和LO为输出,高与低指的是电平)。关于IR2104,其关键点是自举二极管和自举电容的选择,自举二极管在这里选了1N5819肖特基二极管,自举电容的大小可以通过公式求得[6],经前人经验知钽电容的效果比较好,这里选取了1.0 uF的钽电容。
4.2 跟随原理说明及程序设计
该设计中,行李箱跟随的依据是行李箱上基站0与标签之间的距离a和以基站0为顶点的角β的大小(参见图4)。在程序中,设置一个适当的启动距离(80 cm),若a值大于启动距离,则行李箱启动;若a值小于启动距离,则行李箱处于停止状态。在a值满足大于启动距离的情况下,若β值大于110°,则行李箱右转;若β值在70°至110°之间,则行李箱直行;若β值小于70°,则行李箱左转。
在标签对应的程序中,我们根据a值和β值写好了行李箱应该执行的动作,只是执行的动作暂时用字符表示,用S表示停止,用F表示直行,用L表示左转,用R表示右转。然后使标签通过射频把字符发送给基站0,基站0又通过串口把字符传递给主控,所以主控只需根据接收到的字符控制行李箱执行相应的动作即可。标签向基站0发送字符和主控的程序流程图分别如图6和图7所示。
5 结 论
本文提出了一种基于UWB的跟随行李箱系统设计,该系统采用两基站一标签方案,基于DS-TWR测距方法实现对标签的定位,定位后对电机进行控制实现跟随。实验表明,该行李箱在平坦、障碍物较少的场合跟随效果较好。在后续的实验设计中,会为该行李箱增加避障等功能,并进一步优化定位和跟随的算法,逐步完善该系统。
参考文献:
[1] 蔡镕泽,陈章鑫,陈银树,等.基于HT66F70A的跟随购物车设计 [J].福建轻纺,2020(1):37-41.
[2] 连幸.自动跟随服务机器人的设计研究 [J].决策探索(下),2019(9):86.
[3] 孙铭镭.基于自动跟随技术的智能高尔夫球车设计 [D].吉林:长春理工大学,2019.
[4] 庞艳,乔静.UWB无线定位技术探讨 [J].电信快报,2005(11):49-51.
[5] 方晨晨.基于UWB的自主跟随机器人定位方法 [J].软件导刊,2016,15(9):127-129.
[6] 汪华章,宰文姣,马亚宁,等.较大功率直流电机驱动电路的设计与实现 [J].西南民族大学学报(自然科学版),2010,36(4):649-654.
作者简介:杨银标(1997—),男,白族,云南大理人,本科,研究方向:自动化;汪华章(1976—),男,汉族,湖北崇阳人,就职于自动化系,系主任,教授,博士,主要研究方向:模式识别与智能控制系统研究等;冯志锌(1997—),男,汉族,广西博白人,本科,研究方向:自动化;王海臻(1997—),男,满族,河北承德人,本科,研究方向:自动化;杜连成(1997—),男,汉族,云南曲靖人,本科,研究方向:自动化。
猜你喜欢
学苑创造·C版(2020年2期)2020-03-16
百姓生活(2020年1期)2020-01-14
睿士(2019年12期)2019-09-10
发明与创新·中学生(2019年8期)2019-08-27
现代家庭(2018年6期)2018-06-22
小朋友·快乐手工(2017年10期)2018-01-05
中国新闻周刊(2017年39期)2017-11-02
娃娃画报(2017年4期)2017-05-17
英语学习(2016年1期)2016-09-10
现代妇女(2016年2期)2016-03-31