
基于西门子S7-200SMART的SINAMICSV90位置控制应用
2020-08-21 09:09翟雳
数字技术与应用 2020年7期
翟雳
摘要:为了探究如何更方便、准确地实现位置控制,确保其位置控制的精度, 本文探讨了基于西门子S7-200 SMART系列PLC和SINAMICS V90伺服系统的位置控制方法。通过介绍系统软硬件构成及其特点,详细论述了PLC系统通过外部脉冲位置控制模式控制伺服电机,以实现相对运动的过程。
关键词:S7-200 SMART;SINAMICS V90;位置控制
中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2020)07-0001-02
随着自动化水平的不断提高,越来越多的工业控制场合需要精确的位置控制。因此,如何更方便、更准确地实现位置控制是工业控制领域内的一个重要问题。位置控制的精确性主要取决于伺服驱动器和运动控制器的精度。
1 SINAMICS V90伺服驱动简介
西门子SINAMICS V90是2013年推出的小型、高效便捷的标准运动控制伺服驱动系统,配合使用SIMOTICS S-1FL6伺服电机。
SINAMICS V90伺服驱动支持九种控制模式,包括四种基本控制模式(外部脉冲位置控制模式、内部设定值位置控制模式、速度控制模式、转矩控制模式)和五种复合控制模式。
2 西门子S7-200 SMART实现对SINAMICS V90的位置控制方法
2.1 主要设备
西门子S7-200 SMART ST20型PLC,SINAMICS V90伺服驱动器,SIMOTICS S-1FL6伺服电机。
2.2 系统构成
SINAMICS V90伺服驱动器与PLC连接起来,Q0.1与PTIA_24P相连,Q0.2与PTIB_24P相连,Q0.4与EMGS相连,Q0.5与SON相连,Q0.6与RESET相连,SINAMICS V90伺服驱动器与SIMOTICS S-1FL6伺服电机连接。
2.3 控制程序的设计要求
现对上述系统提出控制要求:伺服电动机驱动滚珠丝杆,滚珠丝杆螺距为6mm,机械减速比为1,脉冲当量为1um/p,伺服电机带增量编码器分辨率为10000。当手自动转换开关SA1打到左边,执行手动模式。手动模式下,按住按钮SB1,电机以100r/min正转,按住按钮SB2,电机以200r/min反转。
2.4 SINAMICS V90伺服驱动器参数设置
P29003设置为0,P29014设置为1,P29010设置为0,P29011设置为0,P29012[0]设置为5,P29013设置为3,P2544设置为40,P2546设置为1000,P29301[0]设置为1,P29302[0]设置为2,P29300为6。
2.5 控制程序
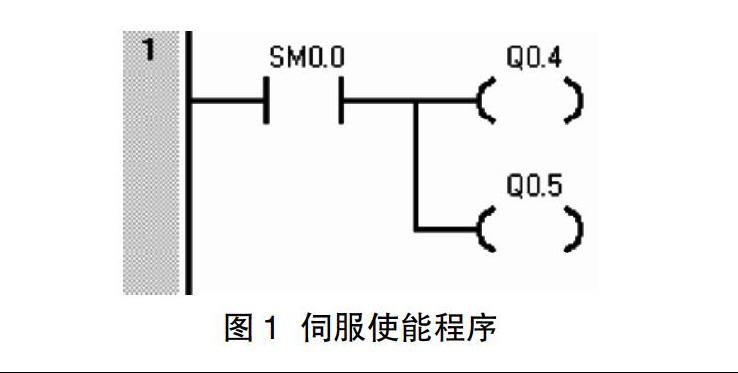
2.5.1 伺服使能解析
如图1所示,网络1是使用Always_On特殊存储器SM0.0,该位始终为1,接通急停信号(Q0.4)和伺服开启信号(Q0.5),使伺服驱动器正常开启。
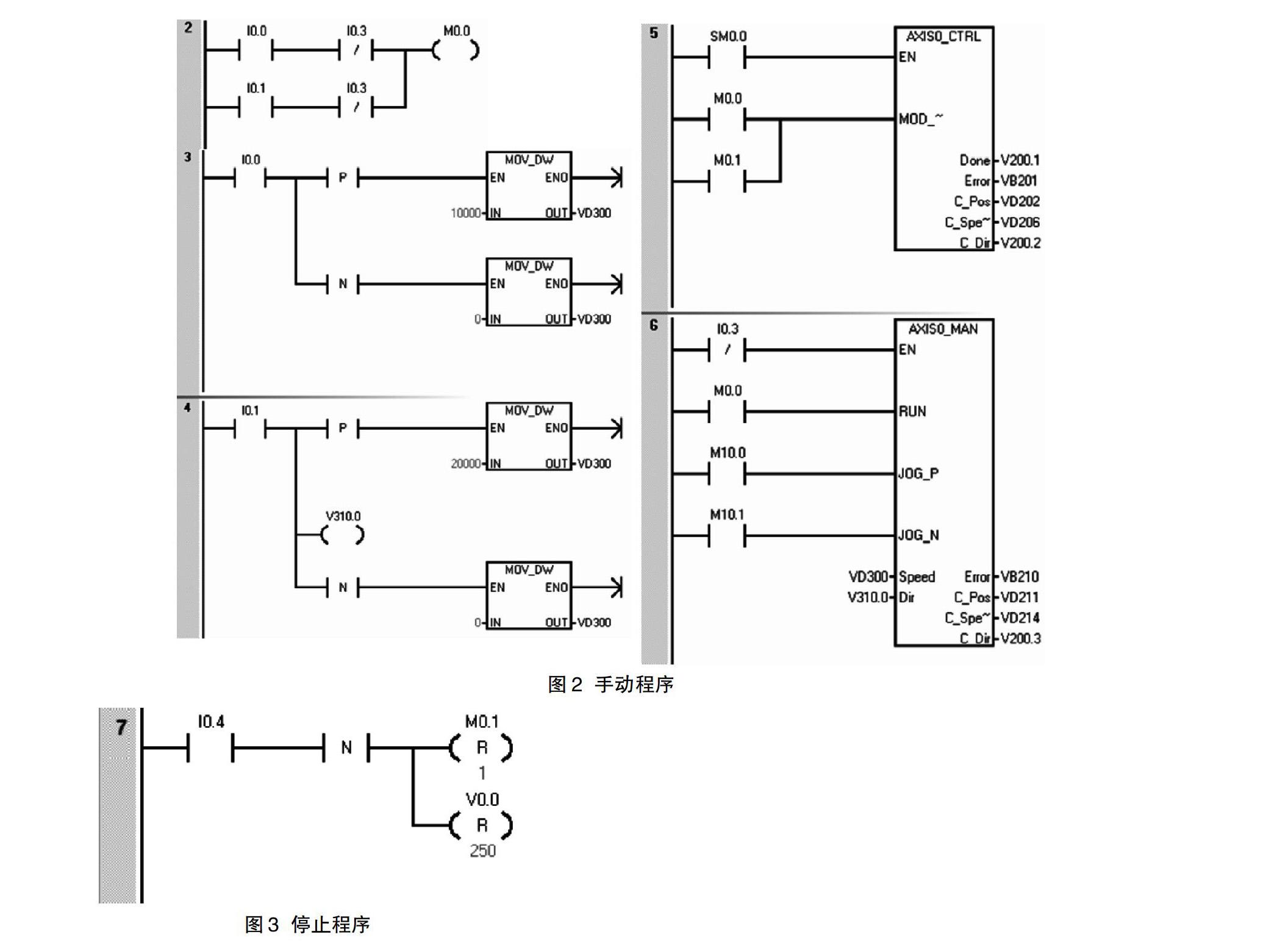
2.5.2 手动部分解析
如图2所示,网络2将手动自动转换开关打到手动状态(I0.3=0),按下点动正转信号(I0.0=1)和点动反转信号(I0.1=1)都驱动点动标志位M0.0。
网络3含义是按下点动正转信号(I0.0=1),将10000传输给VD300,即电机速度为100r/min,V310.0=0则代表正转,电机以100r/min正转。松开点动正转信号(I0.0=0),将0传输给VD300,即电机速度为0r/min,电机停转。
网络4含义是按下点动反转信号(I0.1=1),将20000传输给VD300,即电机速度为200r/min,V310.0=1则代表反转,电机以200r/min反转。松开点动反转信号(I0.1=0),将0传输给VD300,即电机速度为0r/min,电机停转。
网络5是AXISx_CTRL启动和初始化运动,使用 SM0.0(始终开启)作为EN参数的输入。使用点动标志位M0.0为1或自动标志位M0.1为1,MOD_EN 参数处于开启状态。
网络6 AXISx_MAN 是将运动轴置为手动模式。手动自动转换开关打到手动状态(I0.3=0)作为EN参数的输入。使用点动标志位M0.0启用RUN(运行/停止)参数,会使运动轴加速至指定的速度Speed 参数(VD300)和方向Dir 参数(V310.0)。
2.5.3 停止解析
如图3所示,网络7为按下停止按钮I0.4,復位M0.1,同时复位V0.0开始的250位。
3 结语
通过调速,程序能实现控制程序要求,能完成西门子S7-200 SMART通过外部脉冲位置控制模式对SINAMICS V90的位置控制,定位精度较高。
猜你喜欢
锻压装备与制造技术(2021年3期)2021-08-13
微特电机(2020年11期)2020-12-30
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
光学精密工程(2016年5期)2016-11-07
上海电机学院学报(2015年3期)2015-02-28
计算物理(2014年2期)2014-03-11
自动化博览(2014年12期)2014-02-28
自动化博览(2014年7期)2014-02-28
