
一种改善相控阵雷达收发通道幅相误差的校准方法
2020-08-26 05:16陆小凯
舰船电子对抗 2020年3期
陆小凯,张 磊,吴 俭
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
在实际的相控阵雷达中,存在着很多幅度和相位误差源,这些误差由移相器、馈电网络、幅度单元和机械机构等引起[1]。
雷达加工过程中存在制造公差、装配误差、器件不一致型以及通道内损耗和单元间耦合等诸多方面的原因,往往会使雷达天线单元、TR组件、接收和发射通道存在一定程度的幅相差异,所以对相控阵雷达进行通道幅相校正很有必要。
设计师通常会想方设法排除所有相关误差,使得遗留下来的误差都是由于受元件极限精度的限制而产生的剩余、非相关幅相误差,这些剩下的误差被当做随机误差来处理,剩余副瓣误差、增益下降、波束指向误差用统计方法估算[2]。
通道幅相校正通常在近场测试系统中进行,但近场测试时同样存在多种导致幅相误差的因素,包括近场测试系统幅度相位采集误差、测试环境引起的误差等。
1 相控阵雷达天线模型
以一维相控阵雷达为例,假定相关误差和随机误差等导致的各个通道引起的幅度误差为Δai,那么各个通道的幅度为Ai=1+Δai,各个通道的相位误差为Φi(将波束扫描到指定的角度所需的相位不是正确的激励,而是ejΦi),方向图可表示为[3]:
(1)
2 幅度相位误差对副瓣电平的影响分析
高度相关误差:数字移相器引起的周期性幅相误差等,移相器位数引起的峰值副瓣,单元波瓣带来的随机误差所产生的低噪声基底,由相关误差引起的少数峰值副瓣,设计分布产生的带有副瓣的主波束。
随机误差,幅度和相位误差从主波束取一部分能量并把它分配给副瓣,对于小独立随机误差而言,这部分为[1]:
(2)
式中:σφ为均方根相位误差,单位rad;σA为均方根幅度误差,单位V。
这些能量以单元波瓣的增益辐射到远场,均方副瓣电平(MSSL)为:
(3)
式中:ηa为孔径效率;N为阵列规模。
图1为80阵元等距线阵加窗后在不同幅相误差时的方向图仿真结果,所加窗函数为35 dB泰勒窗。
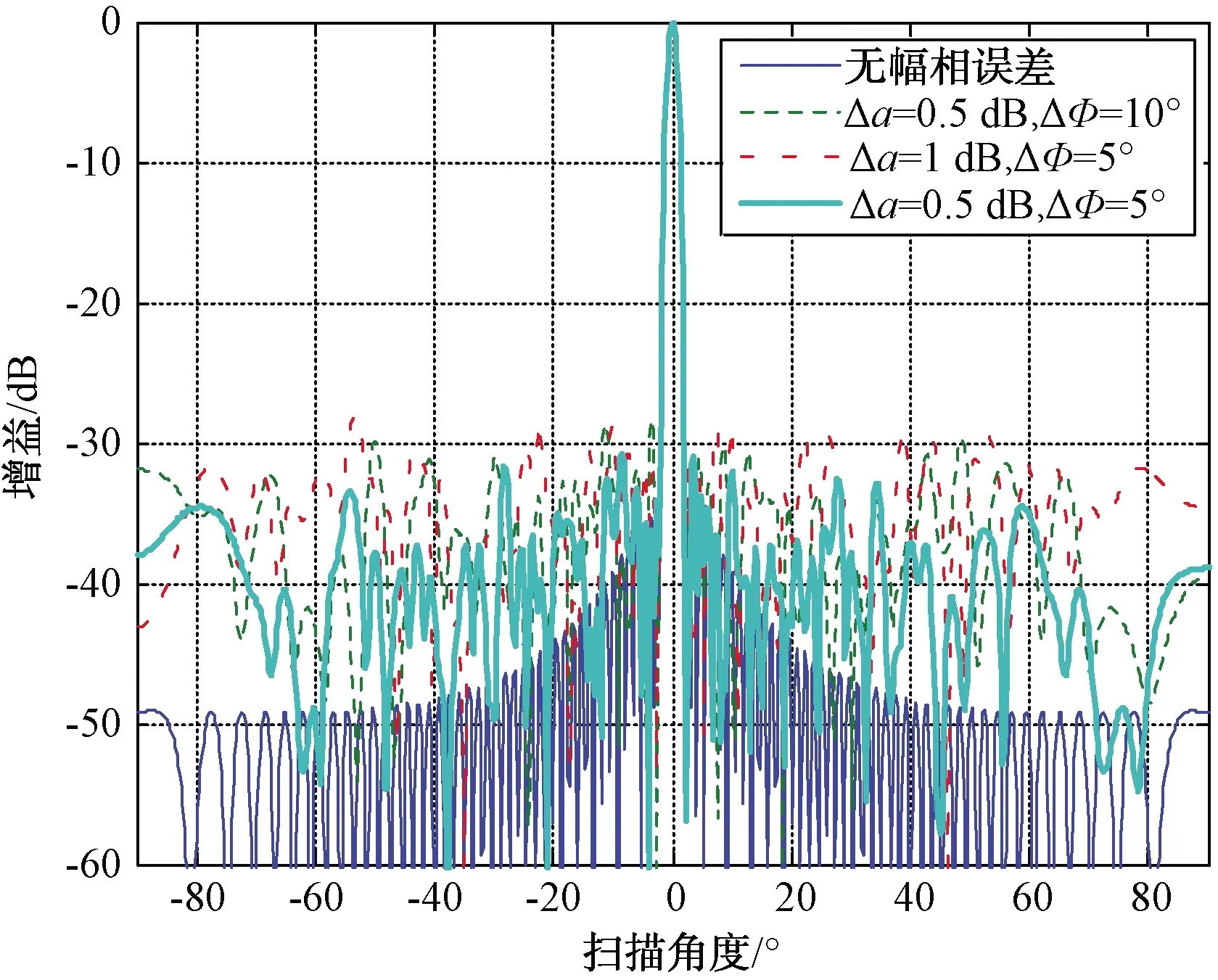
图1 不同幅度相位下的方向图
无幅相误差时,副瓣值为-35.16 dB;各个通道最大幅度误差Δa=0.5 dB、各个通道最大相位误差ΔΦ=10°时,副瓣值为-28.35 dB;Δa=1 dB、ΔΦ=5°时,副瓣值为-27.99 dB;Δa=0.5 dB、ΔΦ=5°时,副瓣值为-30.75 dB。
根据式(3)和图1可以看出:幅度相位误差越大,副瓣偏离理想副瓣电平的程度越大。幅相误差对天线性能影响较大。阵面规模越小,幅相误差对副瓣电平影响越大。因此,幅相校正精细化、准确化很有必要。
3 幅相误差校正
3.1 幅相校正流程
常规幅相校正流程:利用近场测试系统进行各个通道幅度相位信息的采集,形成幅度相位校正表,叠加到各个通道上,利用近场测试系统测试此状态下的方向图,验证幅度相位校正表的有效性以及效果。但往往测试得到的方向图和预期偏差较大,原因为近场系统采集各个通道幅度相位信息时,各个通道独立工作,未考虑各个通道之间的相关性,实际阵面工作时各个通道之间存在相互影响[4-6]。
改进的幅相误差校正流程:首先进行各个通道初始幅度相位的提取,然后形成一次幅度相位校正表,叠加到各个通道上,利用近场测试系统测试此状态下的阵面方向图,根据方向图测试结果对初步幅相校正后的幅相误差进行修正,将通道之间的相关误差进行补偿,得到二次幅度相位校正表,叠加到一次幅度相位校正表上,形成新的幅度相位校正表,再次测量此幅度相位校正表下的阵面方向图,验证幅度相位校正表的有效性。详细流程见图2。

图2 改进的幅相误差校正流程图
3.2 模型建立与求解
根据式(1)建立方程组:
(4)

Xh=Y
(5)
式(5)可解的条件为m≥n,且矩阵X非奇异,上述的解为:
h=X-1Y
(6)
求解的关键在于θ的取值需保证矩阵X不奇异,设θ取值是均匀的,那么θ可以表示为:
θm=θ1+(m-1)Δθ,θm≤π/2
(7)
采用迭代的思路,寻找到合适的θ取值,使得矩阵X逆的条件函数a大于设定的门限值,a=rcond(X)。
3.3 理论仿真
仿真参数为N=80阵元的等距线阵,所加窗函数为35 dB泰勒窗,Δa=1 dB,ΔΦ=10°。在(a)>1e-14的约束条件下,根据式(7)以及矩阵X迭代得到使得矩阵X非奇异的θ取值范围:(-79.75°~38.75°,每隔1.5°取值),接着得到方向图数据,然后利用方向图数据得到幅度相位修正系数。
(1) 方向图波束指向0°时
修正前后各个通道的幅度差、相位差见图3,采用幅度相位修正系数得到的修正后的方向图结果见图4。
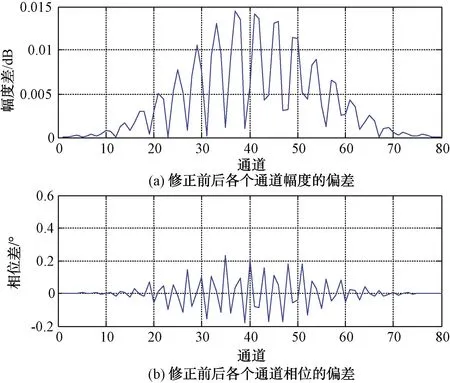
图3 修正前后各个通道的幅度差、相位差
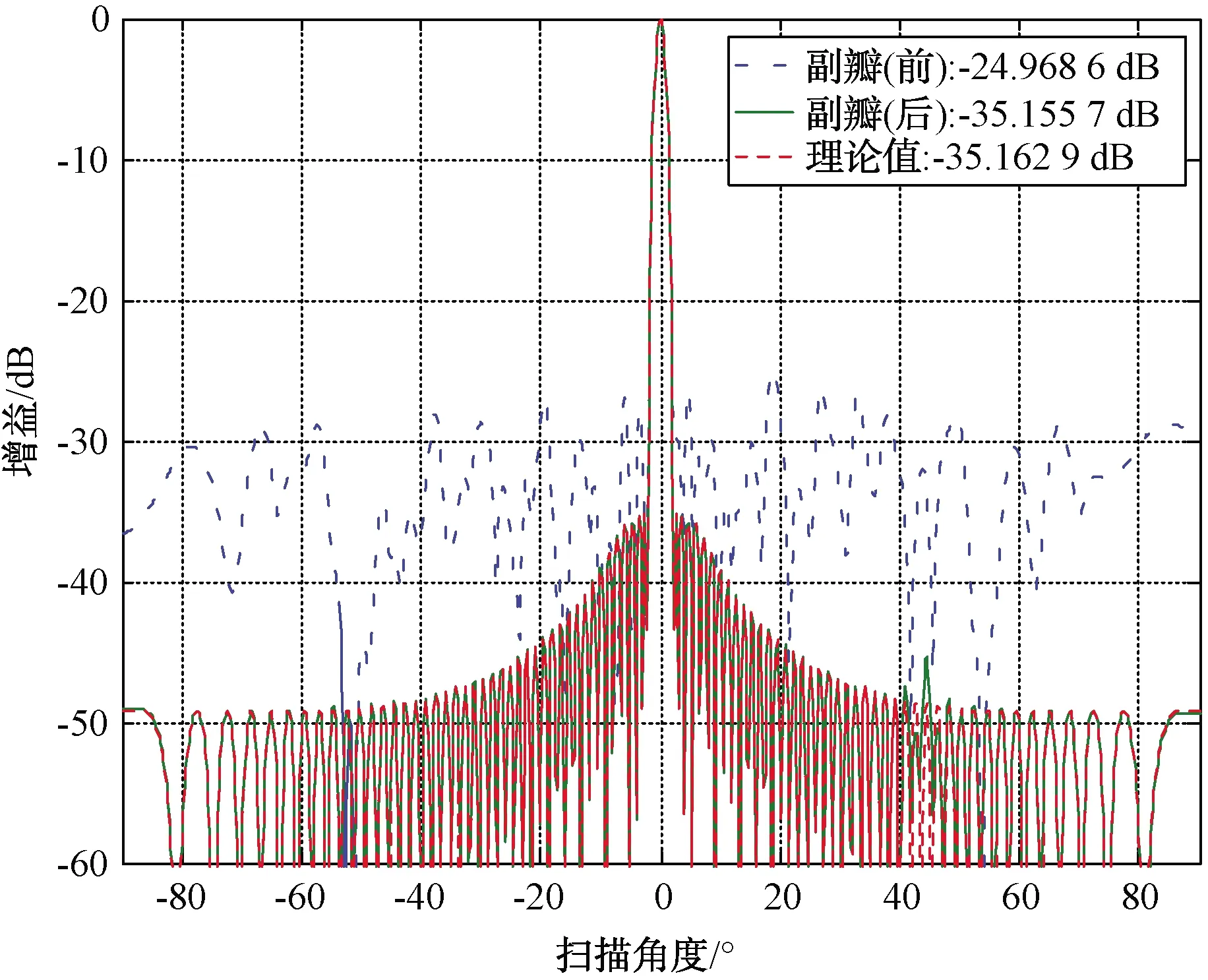
图4 修正前后的方向图
修正后各个通道幅度的偏差最大0.015 dB,修正后各个通道的相位差最大0.2°,修正后副瓣达到-35.1 dB,和理论值接近。
(2) 方向图指向-20°时
修正前后各个通道的幅度差、相位差见图5,采用幅度相位修正系数得到修正后的方向图结果见图6。
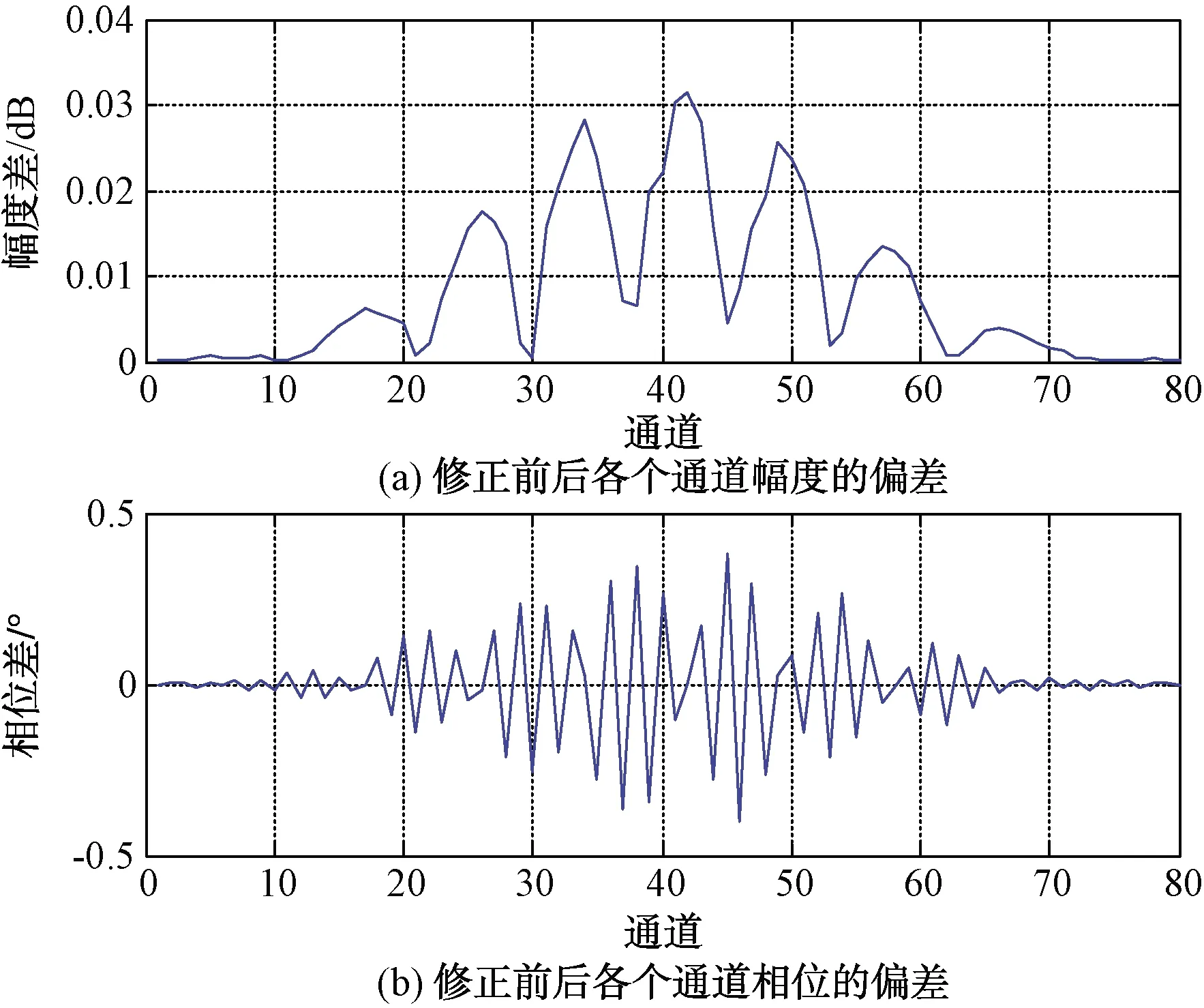
图5 修正前后各个通道的幅度差、相位差
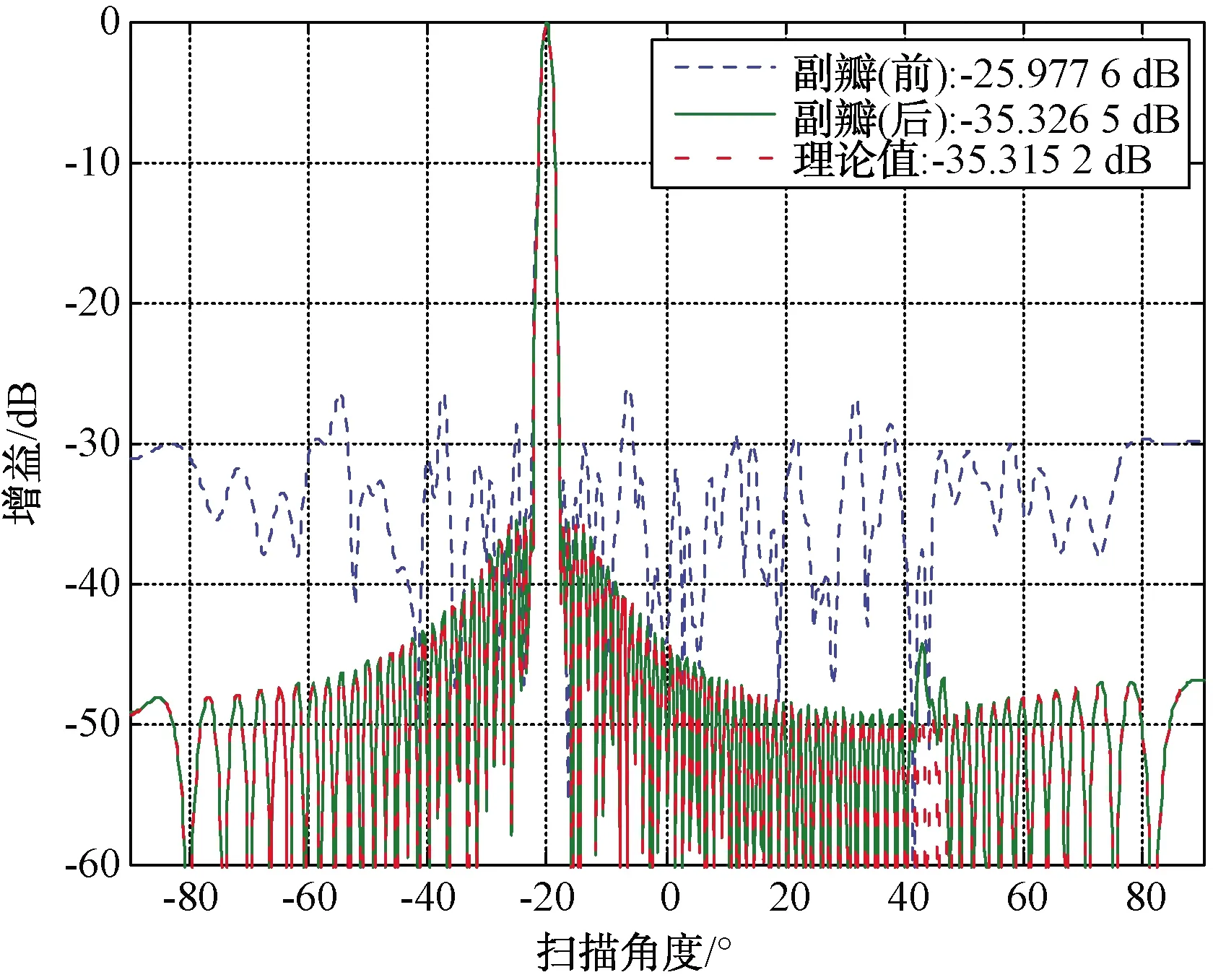
图6 修正前后的方向图
修正后各个通道幅度的偏差最大0.03 dB,修正后各个通道的相位差最大0.4°,修正后副瓣达到-35.3 dB,和理论值接近。
3.4 实测数据分析
某一维相控阵雷达,利用上述方法后实测数据得到的结果见图7。
从图7可以看到,消除了各个通道幅度相位相互影响误差后,副瓣由-21.917 dB提升到了-29.935 dB,但仍然未达到理论副瓣电平(-35.12 dB),说明测试过程中存在随机幅度相位误差,根据式(3)估算出大概幅度相位偏差水平:幅度0.5 dB、相位5°左右。

图7 实测数据修正误差前后方向图对比
4 结束语
本文首先将通道幅度相位误差对阵面方向图的影响进行了理论分析和仿真验证,接着提出了一种改善收发通道幅相校正误差的方法,根据已测阵面方向图数据进行反推迭代,对初步幅相校正后的幅相误差进行修正,建立了数学模型并进行了仿真,最后通过实测数据验证了该方法的正确性。
猜你喜欢
航天制造技术(2022年2期)2022-05-16
股市动态分析(2021年25期)2021-12-30
人民长江(2021年9期)2021-10-18
现代信息科技(2021年21期)2021-05-07
航天返回与遥感(2021年1期)2021-03-16
汽车与安全(2019年11期)2019-06-01
佛山陶瓷(2017年8期)2017-09-06
少年科学(2015年7期)2015-08-13
股市动态分析(2014年27期)2014-07-29
党的生活·党员电教与远程教育(2009年2期)2009-05-13
