
基于重力感应技术与单片机控制的智能供餐台
2020-08-27 08:17章志健
科技风 2020年21期
关键词:单片机

摘要:针对高校食堂供餐速度缓慢的问题,我们将重力感应器植入具有多层保温供餐台的每一层,利用食物取走后感应器检测到的重量变化,触发单片机控制的电机驱动下一层供餐台的提升,以实现及时供餐。
关键词:供餐速度;重力感应器;单片机;电机驱动
随着技术的发展以及5G时代的到来,智能食堂结账无须排队的现象已经越来越常见,但是在高校中人流量过大的时候虽然食堂的取餐速度已经足够快,但是由于受到取餐台大小的限制,食堂后台的供餐速度无疑会受到挑战。目前大部分的供餐方式还是人工供餐,需要耗费较大人力。针对上述问题,本文提出了一种基于重力感应技术以及单片机控制的及时供餐台的想法,以实现真正的“无人食堂”。
1 硬件设计
1.1 总体设計原理
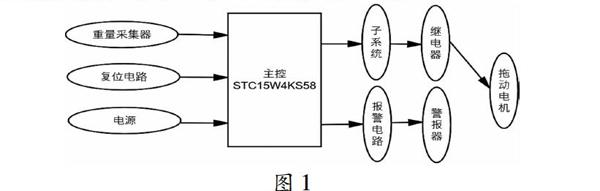
总体硬件设计框图如图1所示。这是一个多片单片机控制的供餐台,基于需要AD转电路,我们选择了单片机STCl5W4KS58为核心。其中一片为主控单片机,其余单片机分别控制着每一层供餐台的子系统。每一层供餐台中的重力感应器可以实时检测台面剩余食物的重量并传递给主控单片机,主控单片机通过将接收到的重量信息与设定好的阈值相比较,如达到阈值(意味着最上面一层的食物已经取光),主控单片机将产生中断请求信号分别送给控制着每一层供餐台的单片机,这些单片机收到中断请求信号后根据内部程序运行:第一层的供餐台将收缩至两侧,之后不再对任何中断信号起反应;其余各层单片机按照预先设计的数据驱动电机将该层的供餐台提升一段距离。如此运行下去,直至最后一层取餐盘中的食物被取光,主控单片机将根据重力感应器送进来的信号触发食堂后方的警报,提醒后方工作人员该餐台已经取空。
1.2 重量检测电路
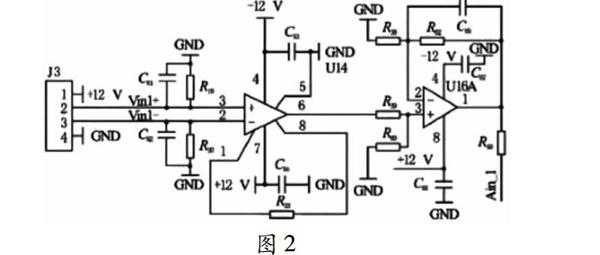
一层供餐台安装多个重量传感器(具体数量根据餐台的规格来定),所有传感器采集重量之和为当前餐台的总重量,我们将传感器的输出信号连续采集10次,求其平均值为当前重量。由于单片机内置的AD转换电路工作范围为0~3.3V,于是我们需要将采集到的信号放大。图2是重量传感器采集信号的放大电路图,其模拟输出Ain1连接到单片机的AD输入端,主控单片机便可采集到当前餐盘的重量。
1.3 电机驱动电路
因为在本系统中我们需要供餐台移动精确的高度,所以该系统中我们采用步进电机控制升降系统运动,通过给定的脉冲周期,步进电机能够以任意速度转动,定距运动较精确。
由于L298N是一款受高电压的电机驱动器,它内部包含4通道逻辑驱动电路,是一种二相和四相电机的专用驱动器,即内含两个H桥的高电压大电流双全桥式驱动器。接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。其具有抗干扰能力强、过电压和过电流保护的特点,有更加强的驱动能力。如图3为电机驱动模块原理图:
1.4 报警电路
现在的报警电路比较常见,本系统中报警电路由电源电路、信号产生电路、信号放大电路、波形变换电路和发声电路构成,电源电路为其他各组成部分提供工作电压;信号放大电路由三极管放大电路和同相比例放大电路构成,采用两极放大能是为了使微小的信号获得足够大的电压增益;波形变换电路是将正弦信号变换成脉冲信号,作为模拟和数字电路的过渡电路;发声电路由时基电路555构成,当有信号输入时,报警音发声电路发出提示声音。
2 软件设计
软件部分由keil软件进行编译,首先通电后将对整个系统进行初始化,初始化后主控单片机进入等待状态,工作台上一有物品被取走,将触发其中断,单片机将采集到的重量与阈值比较,根据比较结果释放命令,这些命令将触发子系统里的单片机执行相应程序。报警模块是一个单独的中断,只有最后一层供餐台的物品被取完,才会触发此中断运行相应程序产生报警。
3 结语
随着生活逐渐走向智能化,无人超市无人食堂的流行,这一技术很好地降低了食堂供餐的人力需求,将具有良好的发展前景。
参考文献:
[1]韩芝侠,王晓利,吕利,等.基于单片机控制的施工升降机监测终端设计[J].机械与电子,2019,37(10):6367.
[2]童志宝.直流电机驱动丝杆用于升降控制电路[J].微特电机,2008,36(9):62.
作者简介:章志健(1999—),男,汉族,安徽人,在读本科生,研究方向:通信工程。
猜你喜欢
计算机应用文摘·触控(2022年8期)2022-05-25
锦绣·中旬刊(2019年8期)2019-09-10
科学与财富(2019年21期)2019-08-06
中国机械(2014年23期)2014-10-21
科技致富向导(2013年10期)2013-06-04
现代电子技术(2009年14期)2009-09-05
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26
电子世界(2004年5期)2004-07-26
