水下地形辅助导航用数字地图分辨率研究*
2020-09-01 02:08徐振烊张静远
弹箭与制导学报 2020年2期
徐振烊,张静远,饶 喆
(1 海军工程大学兵器工程学院, 武汉 430033; 2 91991部队,浙江舟山 316000)
0 引言
惯性导航作为潜艇、水下无人航行器(UUV)、鱼雷、自航水雷等潜航器的主要导航定位手段,鉴于其工作原理,导航误差会随时间逐渐累积,要实现远程精确自主导航,必须借助相关辅助手段,水下地形辅助惯性导航可有效降低潜航器的导航定位误差,增强隐蔽性,提高生存能力,目前该技术已成为世界各国海军装备发展的研究热点[1-6]。利用海底丰富的地形信息,通过相关匹配算法,将测量设备实时测得的地形、水深数据与数字地图数据库中的高程数据进行相关匹配运算,推算出当前水下航行器的位置,以修正惯性导航系统误差[7-9]。目前,国内外针对水下数字地图的构建、匹配算法等相关研究较多,但针对水下数字地图分辨率的公开研究相对较少,制约了地形辅助导航性能的更好发挥[10],而数字地图分辨率又关乎地形匹配精度及效率,分辨率太低无法精确提供地形信息,易造成误匹配,分辨率过高会占用大量存储内存,影响计算效率,导航效果不佳[11]。此外,数字地图是地形的一种数字化表达,选择适宜的分辨率,对计算机制图实现高效化、实时化、精确化提供了支持。因此,需要给出较为适宜的地图分辨率。
文中首先根据真实水深数据,通过双线性插值法制备了多分辨率数字地图;而后,基于经典TERCOM匹配算法,对不同地形数字地图分辨率与匹配误差的定量关系进行了多项式回归分析;最后,根据武汉木兰湖实测水深数据,对二者定量关系进行了仿真验证,最终给出了水下地形辅助导航用适宜的地图分辨率。
1 数字地图模型构建
数字地图是以数字形式记录和存储具有确定位置、属性等地面要素离散数据的有序集合。由于水下环境较陆上相对复杂,测量难度及工作量较大,图像高清实时获取又相当困难,通常选择地形高程匹配中的数字高程模型(digital elevation model,DEM)来表达水下地形信息。为便于数据的存储、使用、管理、分析和计算,采用正方形规则格网结构模型[12],如图1所示。将对象海域按一定格网尺寸进行划分以形成二维格网结构,X和Y方向上的格网间距相等,该间距称为数字地图分辨率对匹配质量及效率有着一定程度的影响。

图1 正方形规则格网结构DEM模型
受目前技术条件、环境及工作量等方面的制约,水下数字地图分辨率普遍较低,水深数据相对匮乏,无法满足地形辅助导航需求。为了研究分辨率对导航定位精度的影响,采用双线性插值法对原始数据进行了插值处理,得到多分辨率水下数字地图,以备后续仿真用。选取台湾海峡东经117.508 3°至东经117.708 1°,北纬21.238 0°至北纬23.104 6°附近海域真实水深数据及武汉木兰湖实测真实水深数据制作水下地形DEM,如图2所示。
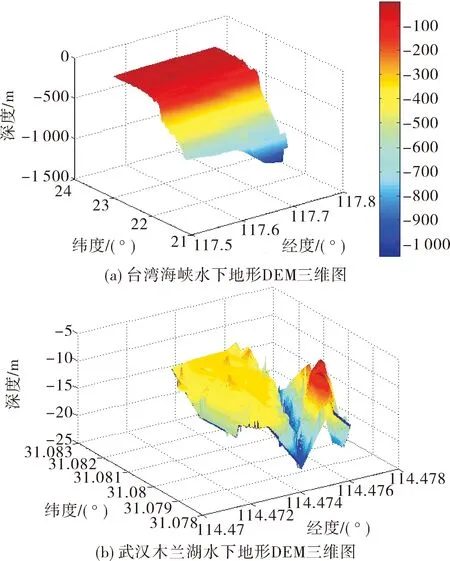
图2 匹配区地形三维图
2 TERCOM匹配算法
TERCOM匹配算法实质上是对地形数字高程序列进行断续批相关处理实现定位,地球表面任何点的地理位置均可依据其周围地域等高线或地形地貌来单值确定,其基本原理如图3所示。当潜航器到达预定匹配区时,通过测量设备按一定采样间隔分别测得潜航器距离海面和海底的距离hr和hl,从而计算得出该处水下地形的绝对深度h,并将其依次缓存,当缓存序列数目达到预设值时,便开始进行匹配相关运算。首先,根据潜航器惯导输出信息在数字地图中找到对应区域的地形高程信息,即基准地形数字高程序列;经过既定时间的实时测量,获得真实地形数字高程序列。而后将这两种序列按照相关计算标准进行匹配相关分析,确定最佳匹配剖面。最后,根据最佳匹配剖面计算得出潜航器的实际位置偏差,以修正惯导偏差,减小前期系统累积误差。
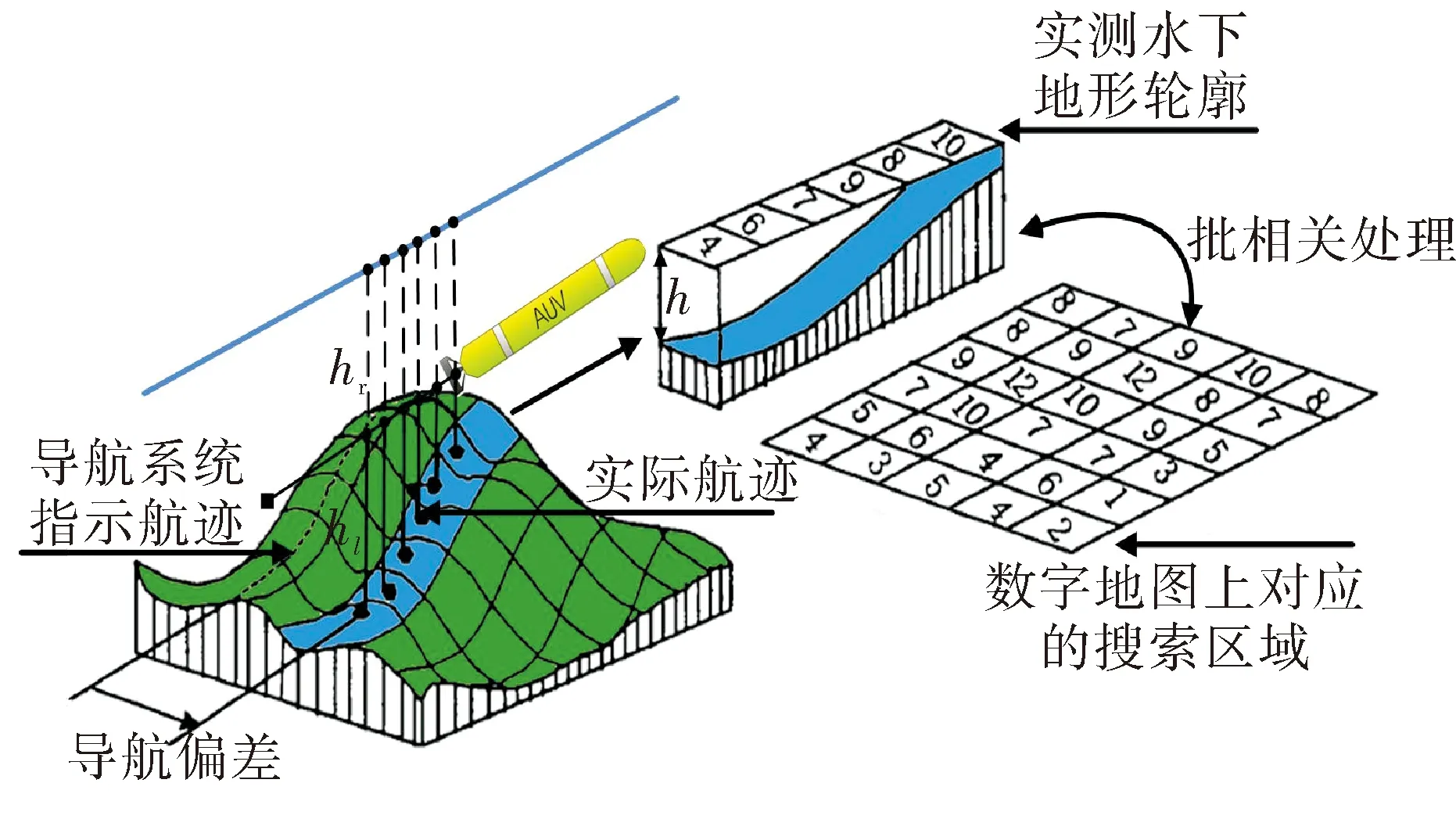
图3 TERCOM算法原理图
TERCOM算法常用的相关性计算方法主要有平均绝对差法(mean absolute difference,MAD)、均方差法(mean square difference,MSD)和互相关法(cross correlation,COR)等3种,计算式分别为[10]:
(1)
(2)
(3)
式(1)~式(3)中:JMAD(x,y)、JMSD(x,y)和JCOR(x,y)分别为搜索位置(x,y)处的MAD、MSD和COR值;N为匹配序列长度;hr(i)为第i序列点实时测量水深数据,hm(i)为第i序列点数字地图基准水深数据。最佳匹配剖面具有最大的JCOR(x,y)值、最小的JMAD(x,y)值或JMSD(x,y)值。以上3种相关算法中,MSD算法匹配精度高于MAD算法,计算量小于COR算法,易于实现,工程中多将MSD算法作为匹配准则。
3 数值仿真分析
3.1 仿真条件设定
TERCOM算法经典、成熟、简单实用,计算量较小,可以大大缩短匹配计算时间,文中考虑采用该算法对复杂条件下系统匹配性能进行仿真分析。均方根误差反映了匹配航迹偏离真实航迹的程度,能够较好地反映匹配效果,以100次蒙特卡洛仿真的均方根误差及误差均值作为匹配误差评价指标,如无特别说明,其他仿真条件设定如表1所示。
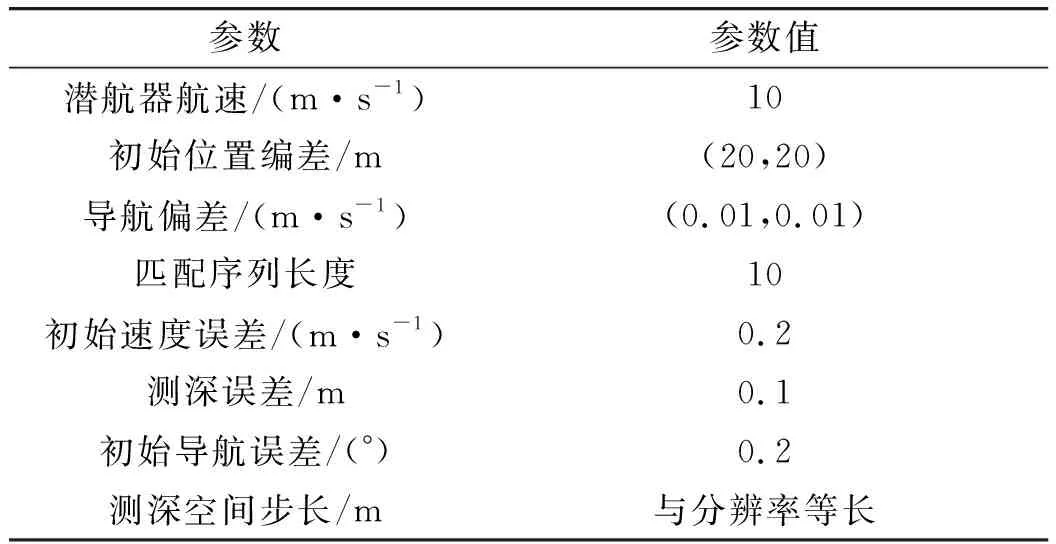
表1 仿真参数设定
3.2 地图分辨率对匹配误差的影响
选取台湾海峡某海域小起伏(或平坦)区为匹配区,匹配航路及对应水下地形如图4所示,地形起伏较平坦,信息差异性较小。
分别选取分辨率为60 m、30 m、14 m的数字地图进行仿真分析,匹配结果如图5所示,误差均值分别为50.93 m、28.34 m、18.74 m,均方根误差分别为55.69 m、30.99 m、21.30 m。
从图5及匹配误差可以看出,随着地图分辨率的提高,匹配误差随之降低,符合人们对分辨率与匹配误差关系的传统预期和认识。但地形选择单一,选取的分辨率较少,仅能定性说明匹配性能好坏与分辨率密切相关,要想较为确切的找到其间的某种关系,还需要做进一步的分析。
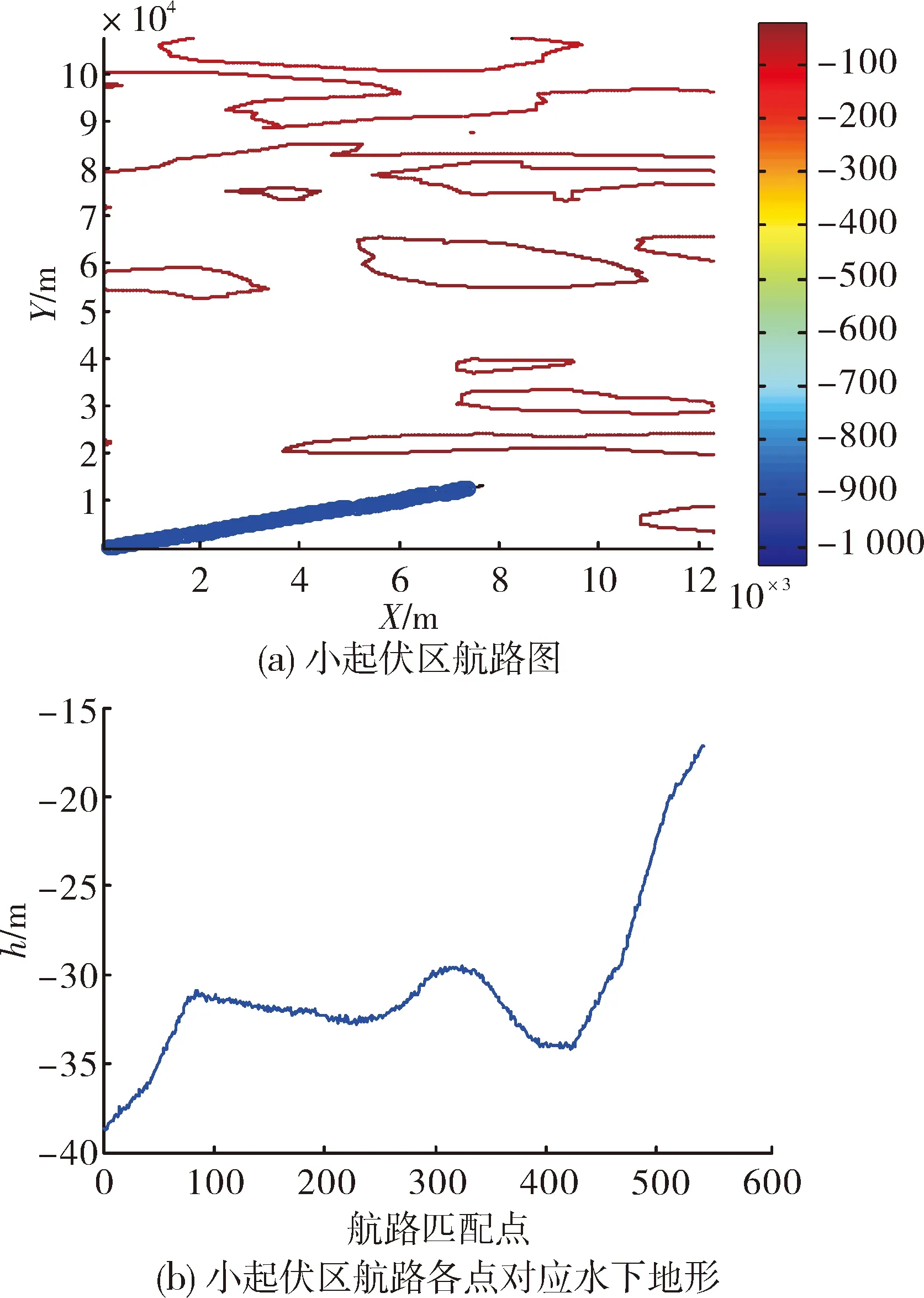
图4 小起伏区匹配航路及对应水下地形
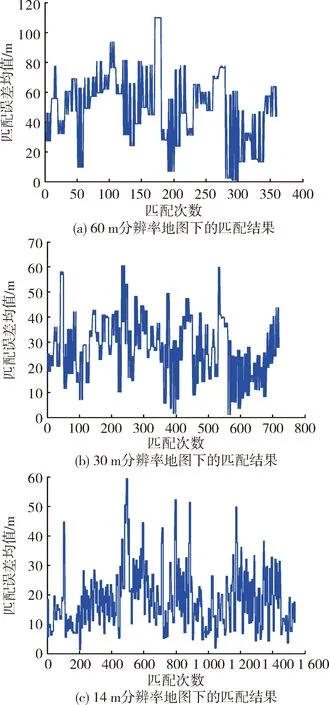
图5 小起伏区不同地图分辨率下的匹配结果
3.3 分辨率与匹配误差的定量分析
数字地图适宜分辨率的确定依赖于地形特征,不同特征的地形可能对应不同的适宜分辨率。文中在分析时将地形分为小起伏(或平坦)和大起伏两种,对适宜分辨率分别进行探究。图6为台湾海峡某海域大起伏区匹配航路及对应水下地形,为了进一步探究分辨率与匹配结果的内在关系,接下来分别分析图4、图6所示的小起伏、大起伏区多地图分辨率对匹配误差的影响,地图分辨率与匹配误差的回归关系如图7所示。
小起伏区拟合曲线方程为:
fS(x)=p1x4+p2x3+p3x2+p4x+p5
(4)
式中:x为地图分辨率,fS(x)为小起伏区匹配误差,p1=4.464e-06;p2=-0.001 058;p3=0.079 24;p4=-1.627;p5=32.27。
大起伏区拟合曲线方程为:
fB(x)=p1x5+p2x4+p3x3+p4x2+p5x+p6
(5)
式中:x为地图分辨率;fB(x)为大起伏区匹配误差;p1=-1.018e-08;p2=4.517e-06;p3=-0.000 758 9;p4=0.057 99;p5=-1.579;p6=31.45。
从图7可以看出,地图分辨率高低直接影响了算法的匹配效果,大起伏匹配区适宜分辨率在25 m左右,小起伏匹配区适宜分辨率在13 m左右。地图分辨率过高或过低均不利于匹配导航,对于小起伏区,地形信息相对匮乏,分辨率低会导致总匹配长度减小,容易出现较大的误匹配,因此匹配所需适宜地图分辨率较高,便于更好的提取地形信息,但是分辨率不可过高,否则会由于地形相似性大而造成误匹配,影响匹配效果,同时也会占用较大存储空间,造成资源的格外浪费;而对于大起伏区,地形信息丰富,匹配所需适宜地图分辨率较小起伏区低。总体来讲,地形信息丰富区匹配误差要比地形信息匮乏区匹配误差小,匹配效果更好。因此,在辅助导航应用中,尽可能选择地形信息丰富的水域作为匹配区。
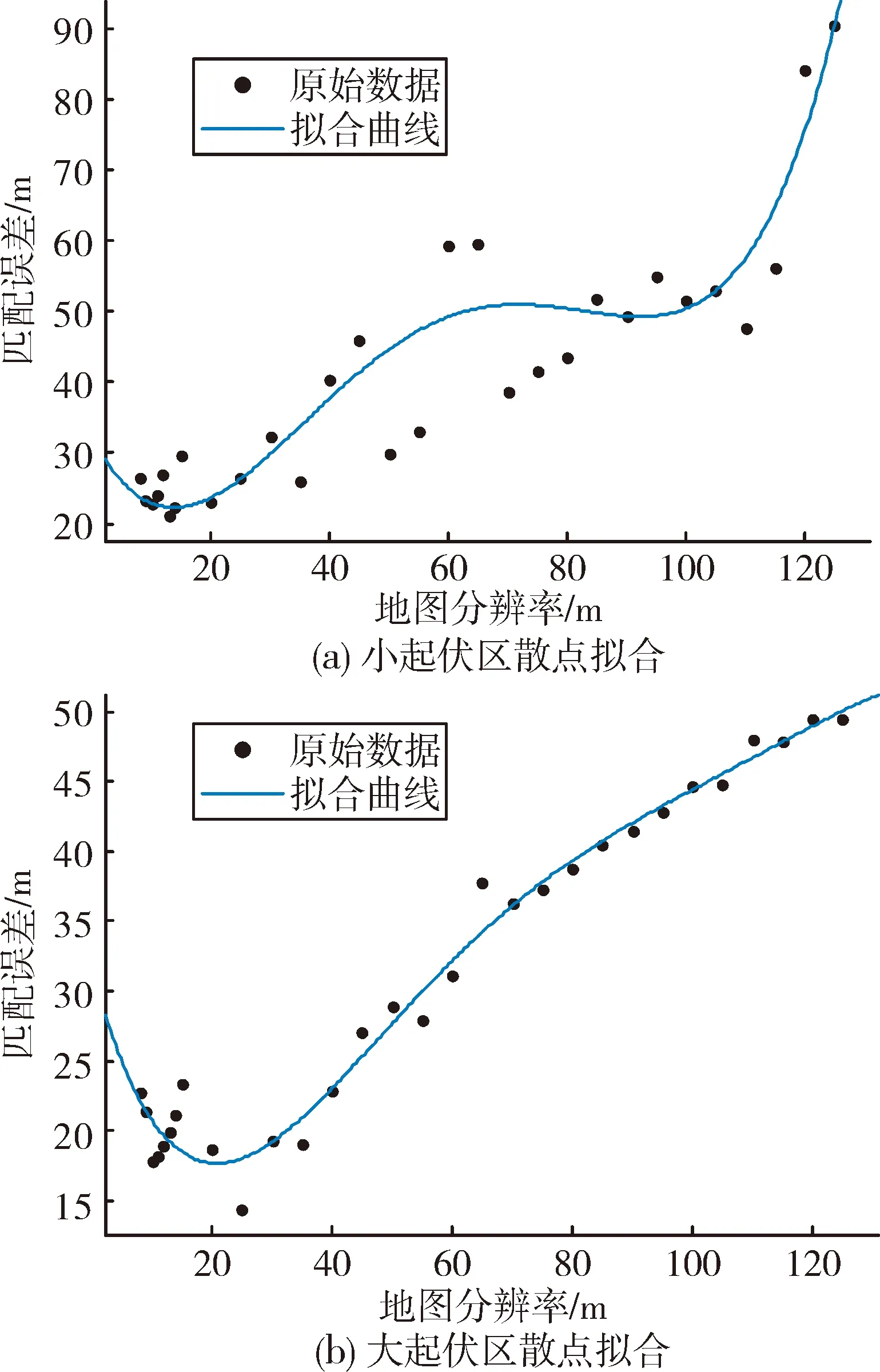
图7 地图分辨率与匹配误差曲线关系
DEM本质上是通过规则栅格单元以数字化的形式来表征实际地形,因此栅格单元的大小(数字地图分辨率、格网分辨率、DEM水平分辨率)决定了DEM与实际地形的逼近程度。理论上讲,分辨率越高,DEM就越接近于实际地形,导航越精确。然而对于实际应用而言,过于追求高分辨率不仅会增加数据处理工作量,而且在实际应用中起不到明显的改善效果。在地图分辨率降低的同时,采样间隔也随之增加,较大的采样间隔加大了匹配序列间的深度差异,在提高测量信息信噪比的同时,也有助于避免小范围相似地形对相关批处理的影响,从而改善了TERCOM算法的匹配效果。
3.4 木兰湖水域实测数据仿真验证
为了进一步分析数字地图分辨率与匹配误差间的内在关系,选取武汉木兰湖实测真实水深数据进行仿真验证。对该水深数据进行双线性插值处理,得到分辨率为2~20 m、25 m、30 m、40 m的水下数字地图,以备仿真用。采用TERCOM算法,将100次蒙特卡洛仿真均值作为匹配结果,匹配航路、航路对应水下地形及10 m分辨率下的匹配误差如图8所示,不同数字地图分辨率对应的匹配误差及其拟合变化关系如图9所示。
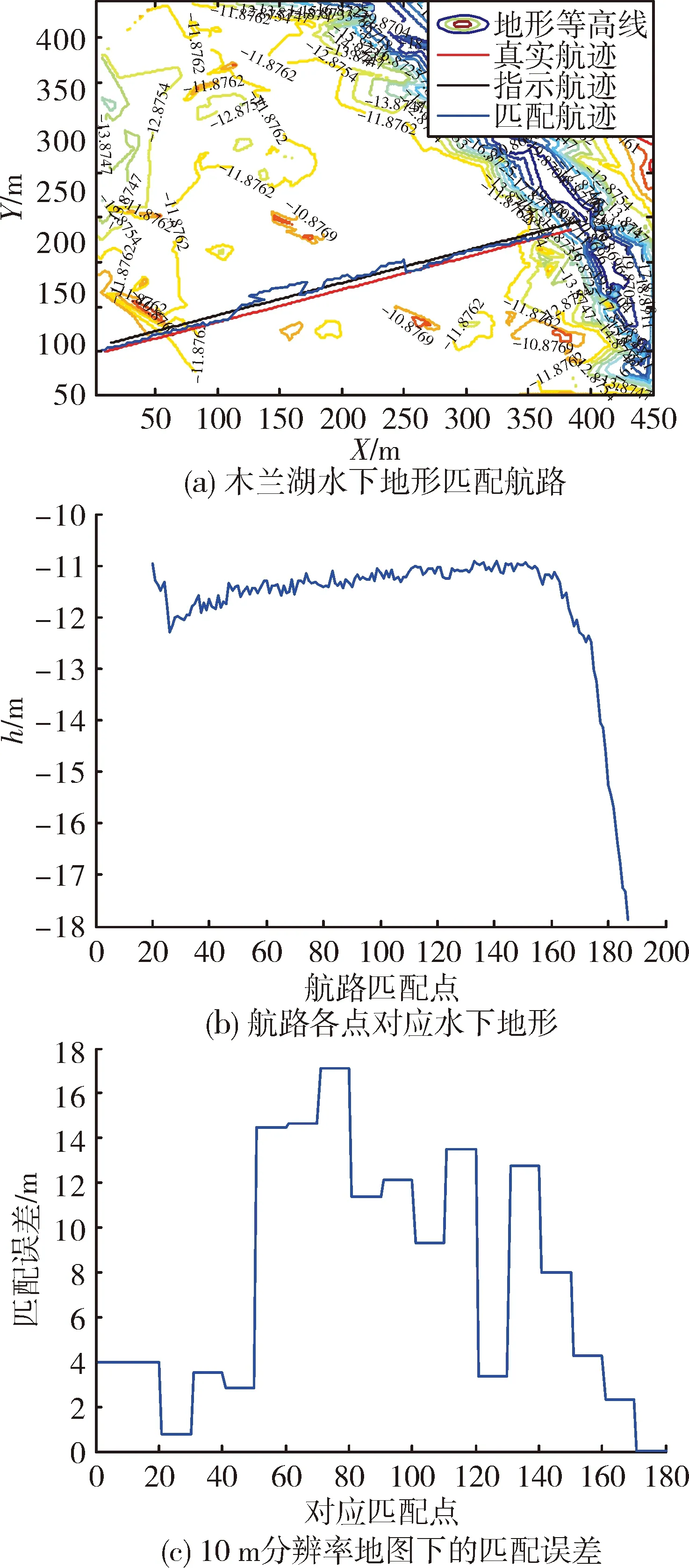
图8 木兰湖匹配水域相关匹配结果
从图9可以看出,匹配误差在较高分辨率处较大,随着分辨率降低,误差均值逐渐减小,当分辨率小于某值时,误差均值又逐渐增大,设x为地图分辨率,f(x)为木兰湖匹配误差,散点拟合曲线方程为:
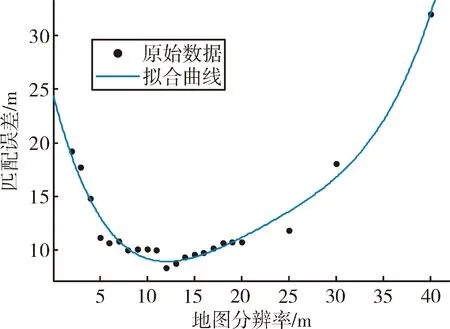
图9 木兰湖地图分辨率与匹配误差曲线关系
f(x)=p1x4+p2x3+p3x2+p4x+p5
(6)
式中:p1=8.258e-05,p2=-0.007 246,p3=0.246 7,
p4=-3.372,p5=24.67。
仿真结果表明,在分辨率为12~16 m时匹配误差均值略小于10 m,在分辨率为12 m左右时匹配误差相对最小,同时,数字地图分辨率与匹配误差近似服从多次线性曲线变化规律。该曲线基本反映了匹配误差与数字地图分辨率之间的变化关系。因此,可以根据回归方程分析同一水下地形匹配区域内在不同数字地图分辨率下的匹配误差,从而可以对实际应用需求和客观条件限制进行权衡,选取适宜的数字地图分辨率。
4 结论
文中以降低水下地形辅助导航误差为目的,对地图分辨率开展了相关研究。以TERCOM算法为支撑,导航系统为研究对象,定性分析了数字地图分辨率对匹配误差的影响;利用多项式回归分析法确定了在一定条件下不同特征地形下数字地图分辨率与匹配误差的定量关系,并给出了水下地形辅助导航用数字地图的适宜分辨率。仿真结果表明,小起伏区和大起伏区适宜分辨率分别在12 m和25 m左右,解决了在导航用地图分辨率选取不明的问题,研究成果可为水下地形辅助导航用数字地图分辨率选取及国内从事相关工作的研究人员提供参考依据。
猜你喜欢
全球定位系统(2022年2期)2022-05-19
测绘地理信息(2022年2期)2022-04-02
地理空间信息(2022年3期)2022-04-01
河南科技(2019年11期)2019-09-10
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
小学生作文选刊·中高年级版(2017年10期)2017-11-07
科教导刊·电子版(2016年35期)2017-04-20
中国集体经济(2017年1期)2017-01-04
数学大王·中高年级(2014年1期)2015-02-12
中小企业管理与科技·下旬刊(2009年9期)2009-03-08