
基于路面识别的ABS模糊控制仿真分析
2020-09-02 06:21陈保山
汽车世界·车辆工程技术(中) 2020年4期
摘 要:本文在路面识别基础上研究了ABS模糊控制仿真实验,并对其进行了分析与探究。在本次ABS模糊控制仿真实验中,产生了一种新型路面识别方式,这种路面识别方式可以基于滑移率对ABS模糊神经网络进行合理的控制。在汽车模型基础上展开了单一附着系数与变附着系数的ABS制动实验。研究结果表示以路面识别为基础的ABS模糊控制系统可以进一步提升对路况的判断准确性,效果优于传统车辆控制器。
关键词:路面识别;ABS模糊控制;仿真;分析
ABS属于汽车防抱死制动系统,该系统内部具有自动控制功能、调节制动功能和防车轮抱死功能。ABS系统在车辆实际制动过程中可以基于车辆的自动调节将车辆的制动力提升至最大。现阶段,在ABS控制系统内部使用范围较广的主要有逻辑门限控制方式,但是这一方式具有较为明显的缺陷。所以为了将ABS系统性能充分发挥出来就应该深入研究滑移率。
1 ABS模糊控制系统概述
ABS(汽车防抱死制动系统)借助车轮制动矩的自动调节降低车辆轮胎在制动的时候产生抱死拖滑的情况,车辆在维持至标准滑移率的时候,车辆具有一定的地面制动力和侧向力,在这种情况下不但可以提升车辆的稳定性和转向稳定性,还可以为车辆提供一定的操控指引,进一步将其制动距离缩短[1]。现阶段,较为成熟的汽车防抱死制动系统都是以逻辑门限值控制手段实现的,这一方法可以通过对速度门限的增减或基于滑移率实现,在实际应用的过程中可以看出,该方法虽然使用步骤较为便捷,但是由于在对其展开调试的时候过于复杂,同时实际制动过程中假如车轮滑移没有维持在标准滑移率内,那么就会促使其周围产生较大的波动[2]。同时,因为路面不同情况和类型对汽车产生的影响各不相同,会直接影响到其附着系数,所以这时可以通过建立路面识别系统识别基础附着系数,为汽车防抱死制动系统能够正常运行做出保证,提升路面附着系数的使用率。结合目前汽车防抱死制动系统控制手段,本次研究对其展开了较为细致的汽车防抱死制动系统模糊控制,该方式主要是借助车辆车轮制动力矩测量路面的附着系数,当?—λ曲线距离最高点越近,那么就需要及时对路面进行识别,采取汽车防抱死制动系统对其进行模糊控制。本次研究基于某车辆模型为研究内容,辅以MATLAB/simulink軟件展开识别与仿真,仿真实验结束后结果表示,以路面识别为基础的汽车防抱死制动系统制动效果较好,可以提升当前路面情况识别的准确性。
2 汽车动力学模型
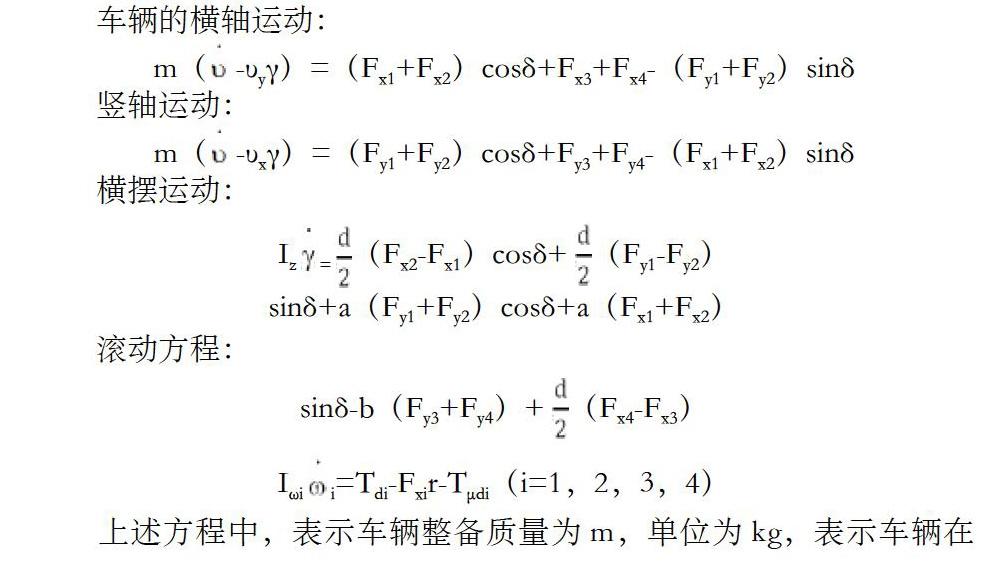
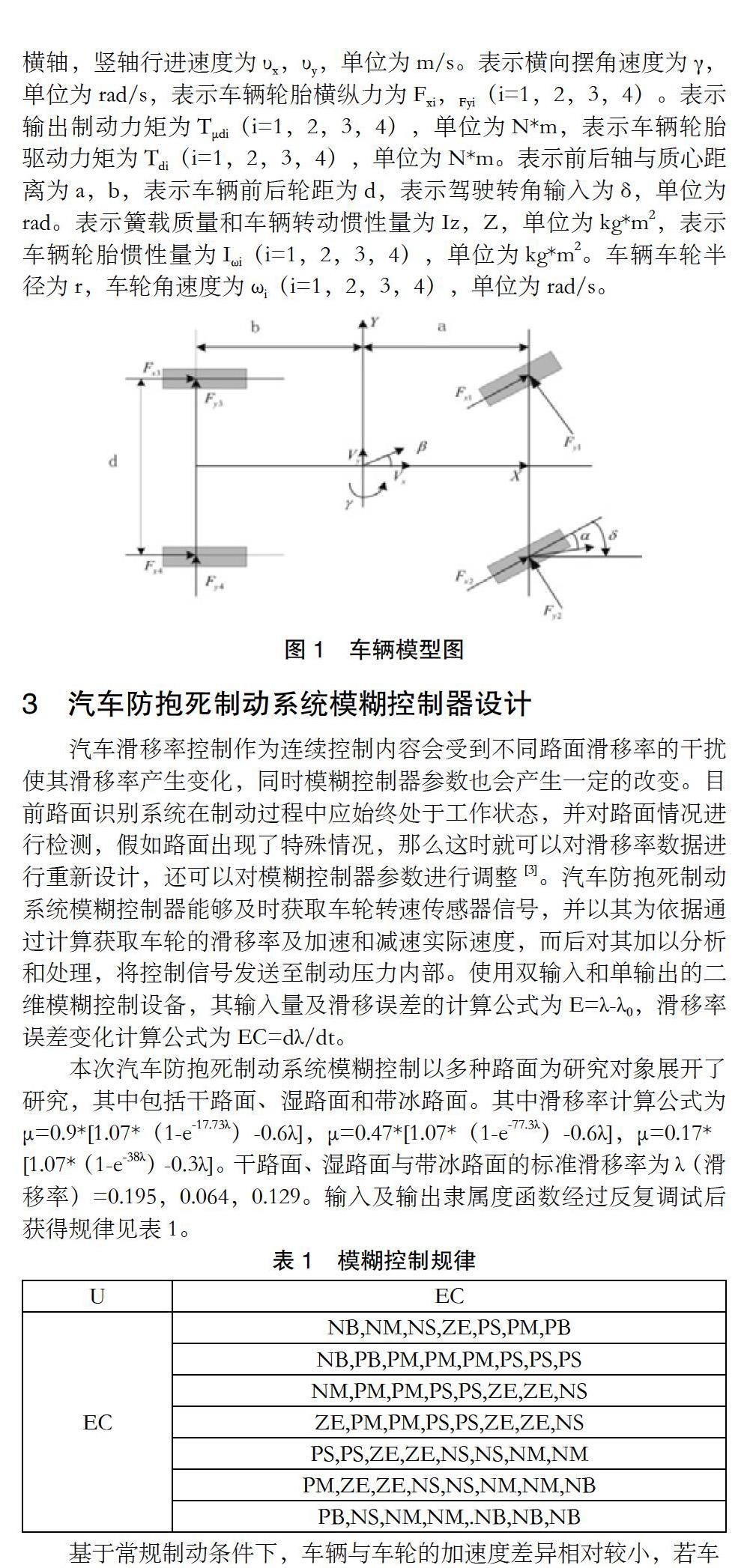
本次实验以某车辆动力学模型为例(如图1),其中车辆的横轴与竖轴平动自由度均以Z为中点进行摆动,同时车辆的四个轮子以其各自中点为轴转动自由度。若该车辆模型上部一坐标系原点和车辆质心契合,在当前路面平滑的前提下,车辆没有进行垂向运动,车辆俯仰角为0,车辆四个轮机械特性一致,车辆前轮转角基本相似,在排除车辆四轮滚动及空气阻力的情况下。
上述方程中,表示车辆整备质量为m,单位为kg,表示车辆在横轴,竖轴行进速度为υx,υy,单位为m/s。表示横向摆角速度为γ,单位为rad/s,表示车辆轮胎横纵力为Fxi,Fyi(i=1,2,3,4)。表示输出制动力矩为T?di(i=1,2,3,4),单位为N*m,表示车辆轮胎驱动力矩为Tdi(i=1,2,3,4),单位为N*m。表示前后轴与质心距离为a,b,表示车辆前后轮距为d,表示驾驶转角输入为δ,单位为rad。表示簧载质量和车辆转动惯性量为Iz,Z,单位为kg*m2,表示车辆轮胎惯性量为Iωi(i=1,2,3,4),单位为kg*m2。车辆车轮半径为r,车轮角速度为ωi(i=1,2,3,4),单位为rad/s。
3 汽车防抱死制动系统模糊控制器设计
汽车滑移率控制作为连续控制内容会受到不同路面滑移率的干扰使其滑移率产生变化,同时模糊控制器参数也会产生一定的改变。目前路面识别系统在制动过程中应始终处于工作状态,并对路面情况进行检测,假如路面出现了特殊情况,那么这时就可以对滑移率数据进行重新设计,还可以对模糊控制器参数进行调整[3]。汽车防抱死制动系统模糊控制器能够及时获取车轮转速传感器信号,并以其为依据通过计算获取车轮的滑移率及加速和减速实际速度,而后对其加以分析和处理,将控制信号发送至制动压力内部。使用双输入和单输出的二维模糊控制设备,其输入量及滑移误差的计算公式为E=λ-λ0,滑移率误差变化计算公式为EC=dλ/dt。
基于常规制动条件下,车辆与车轮的加速度差异相对较小,若车轮趋于抱死在进入活动附着区域内以后,就会提升车辆转身角度。所以这时就需要处于紧急制动下及时监测车轮与车身的加速度,在二者产生较大差异的时候需要立即识别路面附着系数。为了进一步简化计算步骤,在对车辆加速度滑移率取0时车轮量角加速度的进行计算可以使用:,计算车轮角加速度可以使用:=,η为比例系数=。
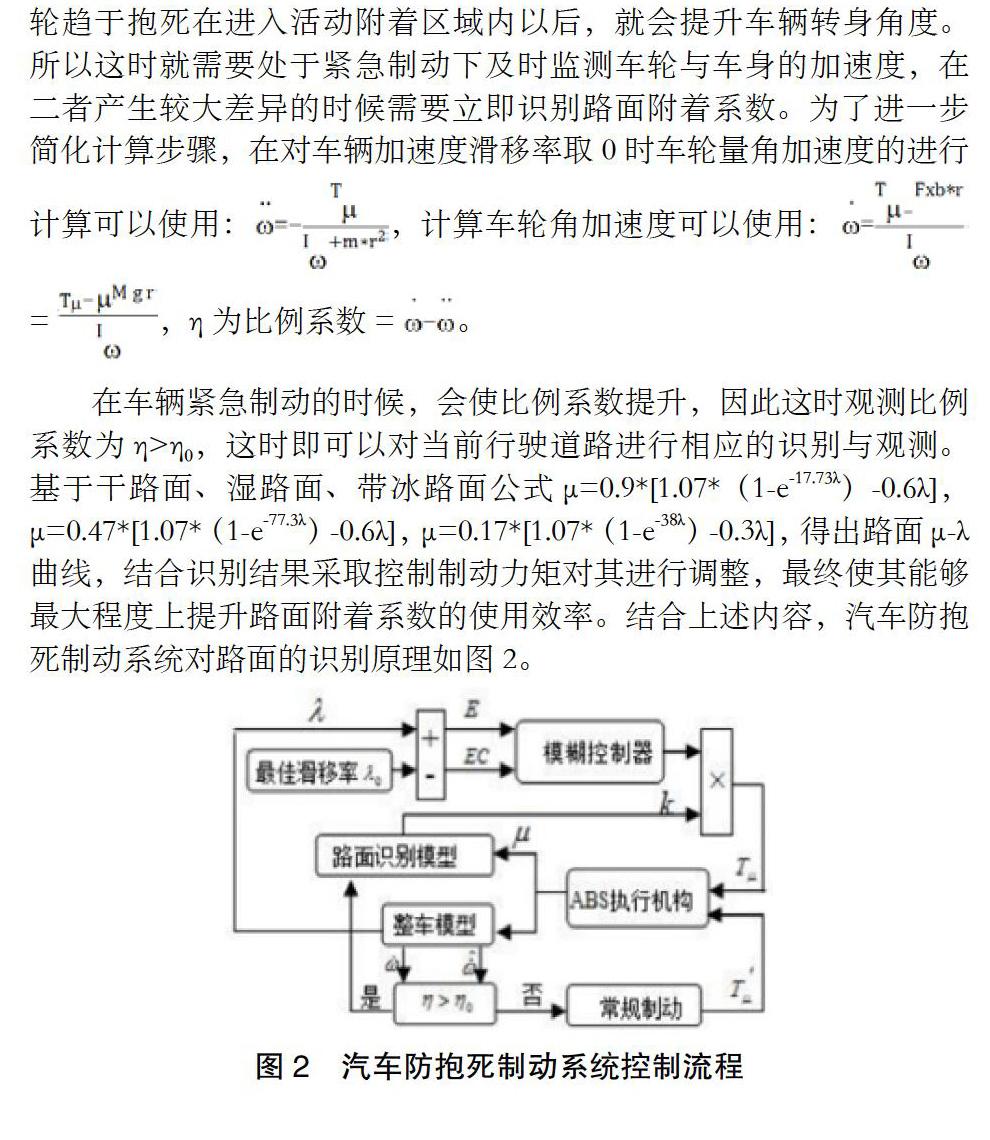
在车辆紧急制动的时候,会使比例系数提升,因此这时观测比例系数为η>η0,这时即可以对当前行驶道路进行相应的识别与观测。基于干路面、湿路面、带冰路面公式?=0.9*[1.07*(1-e-17.73λ)-0.6λ],?=0.47*[1.07*(1-e-77.3λ)-0.6λ],?=0.17*[1.07*(1-e-38λ)-0.3λ],得出路面?-λ曲线,结合识别结果采取控制制动力矩对其进行调整,最终使其能够最大程度上提升路面附着系数的使用效率。结合上述内容,汽车防抱死制动系统对路面的识别原理如图2。
4 结语
综上所述,在本次研究中在滑移率控制下实现了有效的ABS模糊控制器设计。因为,目前道路路况多种多样,这也使其控制策略各不相同。本次ABS模糊控制仿真实验中采用了路面附着系数识别方式对其进行研究,结果表示:以路面识别为基础的ABS模糊控制系统可以较为准确的掌握当前路况,进一步达到设计目标。
参考文献:
[1]夏伟.基于模糊控制的微型车ABS制动性能仿真分析[J].武汉交通职业学院学报,2018,020(003):111-116.
[2]张大禹,卫龙龙,魏洪贵等.基于参数自整定模糊PID控制的汽车ABS系统分析与仿真[J].汽车实用技术,2019,287(08):100-103.
[3]凌滨,宋梦实,邢键等.基于模糊PID的汽车防抱死制动系统[J].计算机仿真,2018,35(10):176-180+202.
本文系院级课题《基于路面识别的汽车ABS系统研究》
课题编号: 2020PZYKY18
作者简介:陈保山(1983-),男,河南濮阳人,本科,讲师,研究方向:从事汽车ABS路面识别研究。
猜你喜欢
科学与财富(2021年36期)2021-05-10
孩子(2020年12期)2020-01-06
作文评点报·低幼版(2018年17期)2018-07-12
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
企业导报(2016年6期)2016-04-21
财经理论与实践(2014年1期)2014-04-02
