
远控岸边集装箱起重机定位技术
2020-09-03 07:37刘东辉余珍胜李书强
港口装卸 2020年4期
刘东辉 余珍胜 李书强
青岛海西重机有限责任公司
1 引言
岸边集装箱起重机(以下简称岸桥)是以装卸集装箱为目的的大型设备,集装箱在船舱或者集卡上,其位置值是一个相对于地面的坐标位置。要实现起重机抓取集装箱,就需要起重机跟集装箱的坐标位置在同一个坐标系下。起重机的三大机构(起升、小车、大车)分别对应集装箱的三维坐标。以地面为基准,建立一个坐标系,X轴为大车方向,Y轴为小车方向,Z轴对应起升方向。在岸桥半自动化运行过程中,起重机基础模块控制各主机构的运行方向和速度,反馈各主机构实际速度和位置给半自动化模块,主机构位置闭环控制在半自动化模块中完成。本文介绍了远控岸桥定位系统的构成和功能,分析了工作机构定位系统与负载定位系统关键技术,可为码头新增自动化岸桥设备或者常规岸桥的自动化改造提供参考。
2 远控岸桥定位系统构成与功能
2.1 远控岸桥定位系统总体构成
远控岸桥的定位系统检测起重机各机构的绝对位置,并与安全碰撞子系统进行连锁检测保护,提高系统精度和安全性。系统主要包括:大车定位系统、小车定位系统、起升定位系统,负载定位系统。定位过程综合应用了无线射频、红外线定位等技术,为设备的自动化、智能化运行提供数据基础。
2.2 大车定位系统
大车定位系统的控制精度为20 mm,可以满足远控岸桥的自动化需求。推荐使用RFM100直线位置测量系统测量大车机构的绝对位置。
RFM100系统是基于无线射频技术(RFID)的单轴绝对位置测量系统,系统由天线、增量编码器、接线箱和磁钉组成[1]。天线安装在岸桥大车上,靠近地面,但高于地面;磁钉安装在沿着大车轨道的地面下,与天线对应,数量取决于大车轨道长度,以规定的间距安装。RFM100系统组成见图1。
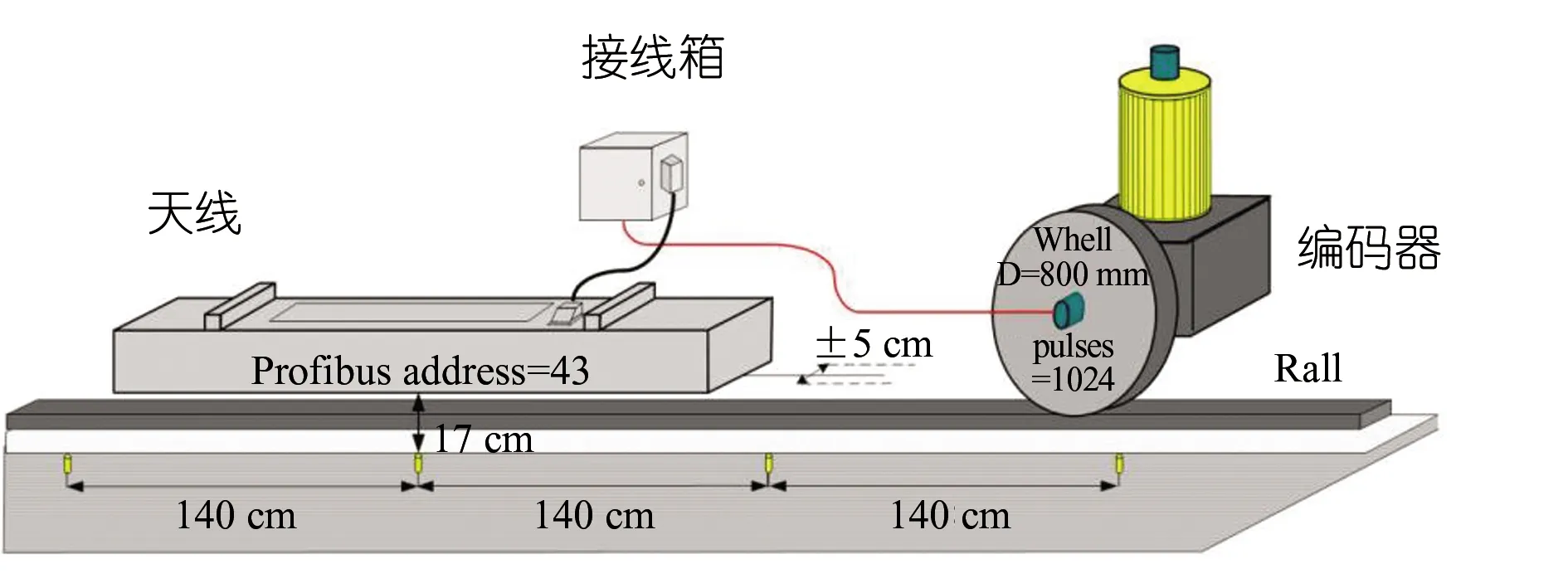
图1 RFM100系统组成
RFID射频工作原理如下。磁钉为全玻璃密封的无源器件,内含储存单元,可自由编写位置代码,可重复编码。天线运行频率为134 kHz,能发出电磁波对其范围内的磁钉充能,激活的磁钉能发出包含储存信息的电磁波,天线接收到磁钉返回的电磁波后,能读出磁钉储存单元的信息和计算出该磁钉在天线范围内的具体位置,发送给主控系统,使主控能进行定位控制。
起重机大车行走过程中,当探头经过感应器时,给予感应器134 kHz的磁场能量,感应器则以一般频率回馈它的编码。探头中的解码器对这个编码进行解码,并将其传输给起重机控制系统。由于感应器安装在码头地面下,其绝对位置不变,且编码唯一,因此探头所得到的编码信息就可以转换为大车在码头的位置[2]。
当选择最小的磁钉安装距离±1 400 mm后,RFM100定位系统可以消除轮子滑动对测量精度的影响。在这种情况下,任何时刻始终有1个磁钉位于天线的下面用于绝对位置的测量,因此可以完全校正轮轨滑动带来的误差。
此系统配置连接到天线的增量型编码器,是用于计算更新2次磁钉阅读之间的距离。增量编码器可安装在车轮的传动轴上,也可安装在驱动轮的电机端上,这种情况下需考虑齿轮变比。编码器需采用HTL型的增量编码器,电源电压为直流24 V。脉冲增量型编码器必须一直连接到RFM100系统中,用于更新计算在射频测量间隔时间内位置的变化。位置数据更新率为1 ms(配置编码器),磁钉绝对位置更新率为50 ms。
RFM100测量系统可以选配不同的通讯接口用于连接起重机的电控系统,同时配置1个调试端口用于系统的设置和诊断。RFM100系统适用的最大速度为12 m/s,满足岸桥大车的允许最大速度要求。RFM100磁钉定位技术方案精度达到2 mm,磁钉埋入地下,不会阻断码头上的行车,基本不受沉降的影响、免维护。
2.3 小车定位系统
小车定位系统的控制精度为20 mm,可以满足远控岸桥自动化需求,定位方案为小车绝对位置检测(线性磁尺)定位系统和增量式编码器(小车电机自带编码器)两套独立的位置检测系统。两套位置检测系统互相校验,当两个位置检测系统中的一个发生故障时,仅一个位置检测系统也可以保证定位功能。小车定位系统建议采用POMUX KH53直线式绝对编码器。
POMUX KH53直线式绝对编码器由两部分组成:阅读器(探头)和感应标尺(磁尺)。阅读器安装在小车上和小车一起移动,感应标尺则沿着轨道方向安装,保持一定的直线度,且和小车上的阅读器保持一定的间距。
阅读器内置有用来检测磁性元件的霍尔传感阵列,每段感应标尺内置了不同数量和距离分布的永磁铁。这些在感应标尺内按照一定方式排列的永磁铁代表此段感应标尺的位置编码,顺序排列的3个永磁铁为唯一的位置组别。测量时,通过阅读器里的霍尔传感器阵列检测该磁场编码,确定绝对位置(见图2)。这些信息通过接口通讯传输给起重机控制系统。

图2 POMUX KH53直线式绝对编码器工作原理
POMUX KH53增强型系统测量距离可以从几m到548 m,完全满足起重机的使用范围要求。系统要避免各类磁场的影响,如磁铁限位、动力电缆产生的磁场,电机、磁性钢等。整个行程中,任何POMUX KH53元件和其他磁性材料,都必须保证最小80 mm的间距。感应标尺安装支架和螺丝都必须用非磁性材料制作。
POMUX KH53无论在哪种工作条件下,探头必须能感应到感应标尺,即探头必须一直在相对磁尺的垂直或水平间距容许误差内,KH53增强型最大容许的水平误差和垂直误差都是±20 mm。
2.4 起升定位系统
起升定位系统的控制精度为10 mm,可以满足远控岸桥的自动化控制需求。系统采用抗干扰性和数据可靠性好的U-ONE绝对值编码器。U-ONE为一种电子位置凸轮,将速度、位置和超速检测结合在1个单元里。该系统包括1个通用的基本单元及通过EMC防护光纤电缆连接到控制柜内的电子功能模块。编码器安装在卷筒侧,与船型扫描(SPSS)激光测距反射板做双重校验。
2.5 负载定位系统
远控岸桥陆侧自动着箱的控制关键为负载定位系统。负载定位系统用于检测吊具在大车和小车方向上的偏差位置和实际的扭转角度,即测量吊具在X方向和Y方向上的实际偏差和扭转,用于实现对吊具位置控制的闭环反馈,最终实现吊具和目标位置(例如集装箱和集卡)的精确对准和闭环防摇。
负载定位采用IRM(InfraRed Measurement system for spreaders)红外线吊具测量系统,与传统的透镜和CMOS传感器组成的照相测量系统不同,IRM采用透镜把红外线光源投影聚焦到PSD(位置感应器)上,PSD能够对光斑进行高精度的定位。
IRM系统由1个红外线发射器和1个接收器组成,红外线发射器安装在起重机吊具上架上,接收器垂直安装在对应的小车架下。在小车架上的接收器内部的PSD光电板接收到从安装在吊具上架上的发射器发送过来的红外线光脉冲,转变成不同数值的电压、电流信号,从而计算出高度、摇摆、扭转等测量值。发射器TX内置二维倾转传感器,可通过吊具电缆或者无线传送测量值,完成TRIM/LIST数据传输;接收器RX内置二维倾转传感器测量小车前后和左右倾的角度,小车倾斜测量。
每个发射器有2对LED发光点组成,每一对LED发光点会安装固定的频率向接收器发射红外线光线,并且按照时间编码轮流发射。在有效的工作距离内,接收器铺捉和检测每一对LED发光点发车的光斑,同时计算接收器和发射器之间的距离、摇摆的角度和回转的角度。
岸桥采用IRM400系统,可测摇摆角度为±4.5°,大车和小车方向摇摆角度精度为±0.02°,回转角度0~360°,回转角度精度±0.2°,TRIM/LIST角度±5°,TRIM/LIST精度±0.05°。以上测量精度满足远控岸桥的陆侧自动着箱。自动化PLC将会根据系统提供的检测结果计算出一个补偿位置值,并实时监测吊具相对于小车和周围集装箱之间的距离以及吊具实际旋转角度。
3 结语
集装箱起重机的精确定位对于实现自动化至关重要,随着物联网技术的发展和检测技术的进步,以及对自动化精度要求的提高,更先进的定位系统将不断出现,并应用到集装箱起重机领域。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
起重运输机械(2021年21期)2021-11-24
快乐语文(2020年36期)2021-01-14
中国特种设备安全(2018年10期)2018-12-18
专用汽车(2018年10期)2018-11-02
现代机械(2018年1期)2018-04-17
制造技术与机床(2017年7期)2018-01-19
中国铸造装备与技术(2017年3期)2017-06-21
启蒙(3-7岁)(2017年9期)2017-02-26
西安工程大学学报(2016年6期)2017-01-15
