
基于LabVIEW的汽车稳态回转测试系统的研制
2020-09-10 07:22顾彤彤佘冬翠
内燃机与配件 2020年9期
顾彤彤 佘冬翠
摘要:对数值计算与现场试验复杂耗时的难题,提出基于虚拟试验技术的汽车稳态回转仿真实试验方案。探究基于LabVIEW汽车稳态回转测试系统的设计方案,验证汽车稳态回转测试系统的精确性,依据国标GB/T6323-2014仿真分析汽车稳态回转试验。结果表明,仿真试验结果与测试图形结果基本吻合,从而验证了测试系统的可靠性。基于上述性能试验,得到符合国标的汽车稳态回转试验方法,为研究汽车操纵稳定性的回转特性提供了一种仿真试验的方法。
Abstract: Aiming at the difficult problem of numerical calculation and field test, a real test method for steady state rotation of automobile based on virtual test technology is presented. Based on LabVIEW, the design scheme of the vehicle steady state rolation test system is explored, the accuracy of the vehicle stability test system is verified. The automobile steady state rotation test according to the national standard GB/T6323-2014 is analyzed. The results show that the simulation results are basically consistent with the test results, so as to verify the reliability of the test system. Based on the above performance test, the experimental method of steady state rotation is obtained, which provides a simulation test method for studying the rotation characteristics of the vehicle's handling stability.
關键词:汽车稳态回转;测试系统;LabVIEW;系统可靠性
Key words: car steady rotation;test system;LabVIEW;system reliability
0 引言
本课题是研制出一款基于LabVIEW的汽车稳态回转试验数据分析的软件。由于操纵稳定性稳态回转试验测试结果处理过程复杂,仅靠人工现有通用软件进行数据处理,不就耗费大量的人力和时间,而且很难使处理结果规范统一[1]。数据处理很大程度上加重了试验人员的负担,所以才会开发专门的软件用来对操纵稳定性的实验数据进行处理,以此获得符合测试报告所需要规范的数据处理结果。
1 稳态回转试验概述
1.1 稳态回转试验的检测原理
汽车稳态回转试验需要检测和评估的参数包括:不足转向度、中性转向点的侧向加速度及车身侧倾度[2]等,并基于这三个参数全面评价汽车的稳态回转特性[3]。
依据国家标准GB/T 6323-2014,规定了固定转向盘转角连续加速的稳态回转试验方法[4]:在符合实验要求的场地上,被测汽车按左转和右转两个方向,每个方向测三次,记录仿真过程中整车稳态回转的运动轨迹,整车行驶速度和方向盘输入信号的时间历程曲线,侧向加速度、横摆角速度和车身侧倾角的时间历程曲线。根据公式(1)和公式(2),在仿真过程中,还需要进一步计算和分析,转弯半径比、车身侧倾角、汽车前后轴侧偏角差和侧向加速度在不同时刻的关系曲线。
式中:
Rk为第k点转弯半径,m;
Vk为第k点车速瞬时值,m/s;
rk为第k点横摆角速度瞬时值,(°)/s;
σ1为前轴侧偏角,(°);
σ2为后轴侧偏角,(°);
L为汽车轴距,m。
在LabVIEW中程序框图中,它先后读入、转换输出数据,提取所需的数据,最后依根据数学运算实现了处理后数据的实时显示。
1.2 稳态回转试验的评价标准
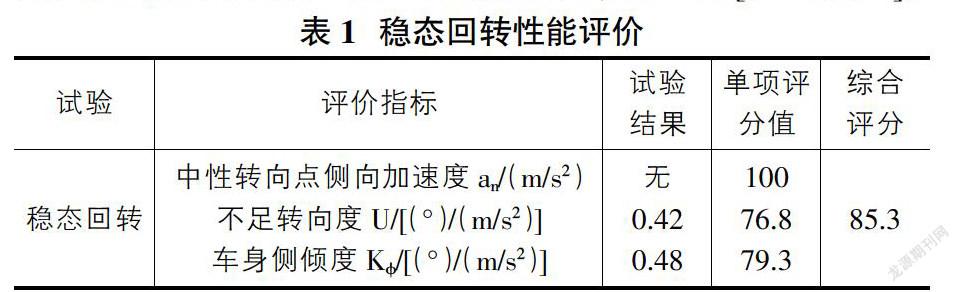
据文献[3]的定义和要求[5],中性转向点的侧向加速度an,是指侧向加速度和前后轴侧偏角差关系曲线上,斜率为零处的侧向加速度;不足转向度U即为前后轴侧偏角差与侧向加速度关系曲线上,侧向加速度值为2m/s2处的平均斜率(通过将纵坐标值除以横坐标值来计算)[8];车身侧倾度K?覫是指在车身侧倾度与侧向加速度关系曲线上,侧向加速度为2m/s2处的平均斜率(通过纵坐标值除以横坐标值来计算)[7]。在侧向加速度an值、不足转向度U值、车身侧倾度K?覫值确定后,分别计算出an的评价计分值Na、U的评价计分值Nu、K?覫的评价计分值N?覫,最后将这三个计分值取平均值,以获得稳态回转试验的综合评价计分值Nw。
2 测试系统的软件设计
2.1 软件设计的一般流程
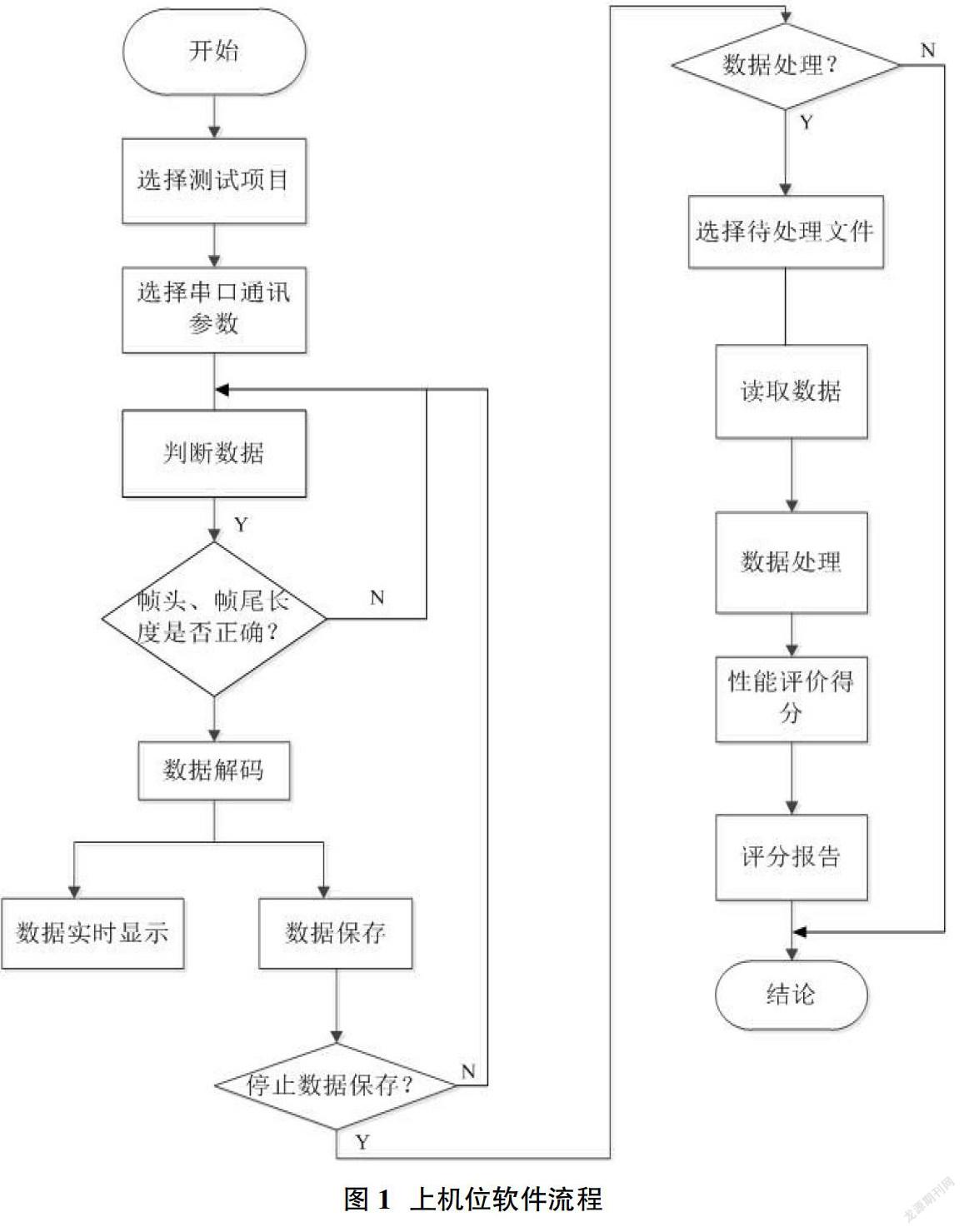
LabVIEW软件上机位软件设计流程,如图1所示。
根据操作顺序,程序主要流程可分为以下三个部分[6]:①通讯参数配置部分。在这一部分中,首先选择要测试的项目,然后需要完成用于串口通讯的参数设置;②数据采集,存储部分。从系统接收从串口发送的数据,根据通讯协议对数据进行匹配,匹配正确后进行解码和存储;③数据处理部分。选择存储的文件并读取有效数据,同时计算和评估车辆性能,最后形成评分报告[7]。
2.2 基于LabVIEW数据处理软件设计及分析
2.2.1 数据处理软件设计
利用Lab VIEW操作平台,对已知参量时间(t)、角速度(ω)、车身侧倾度(fi)、汽车前进车速(v),通过公式(3)、(4)及(5)的转换。
其中:R为汽车转弯半径;
R0为汽车初始半径,本文取0.94m;
ay为汽车侧向加速度;
Ф为汽车前后轴侧偏角差;
L是汽车轴距,本文取3m。
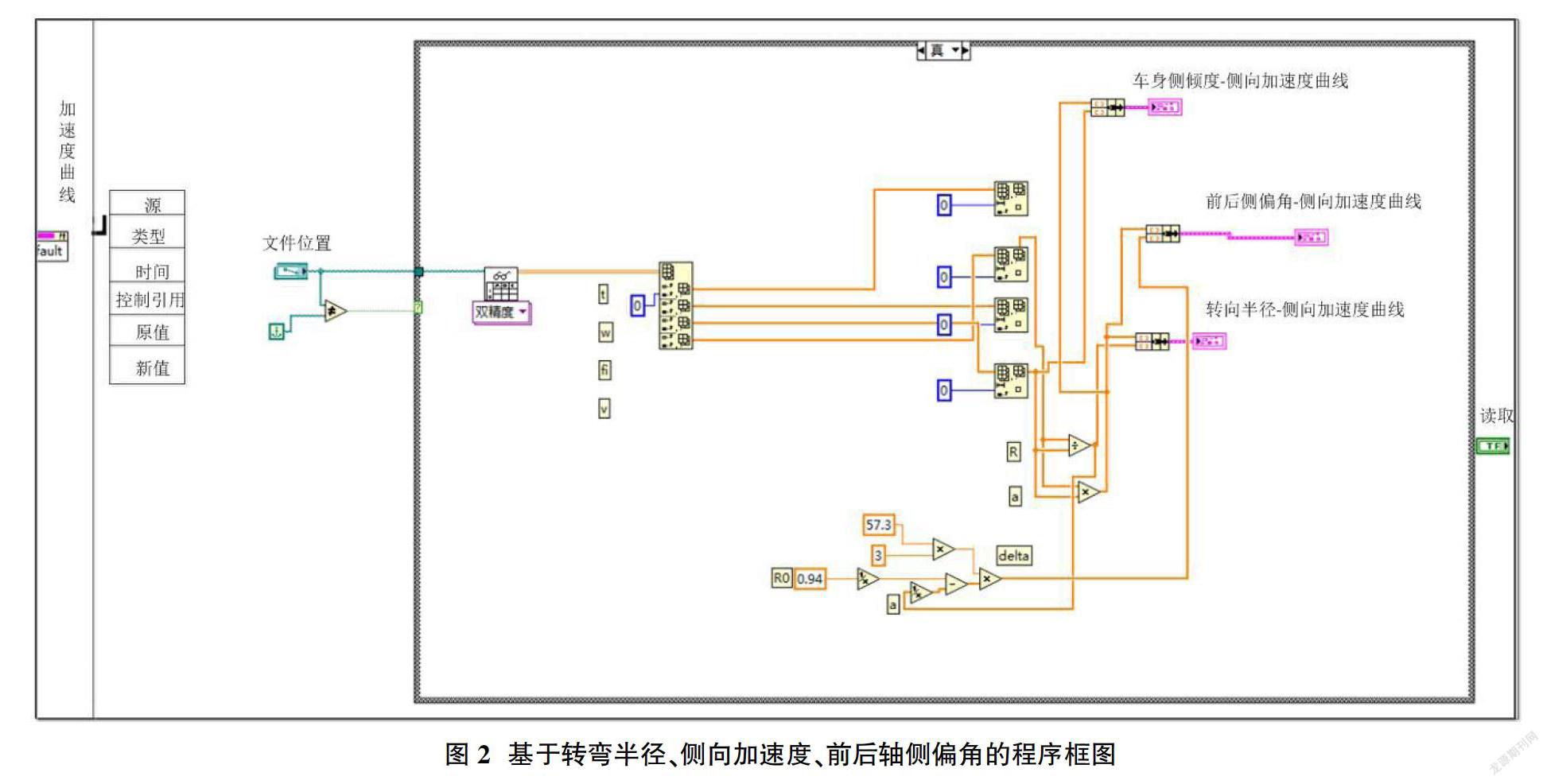
编写出基于转弯半径、侧向加速度、前后轴侧偏角的程序框图如图2所示。
2.2.2 数据处理软件分析
完成测试过程后,考虑到良好的人机交互性,进入数据处理的部分,在读取数据时,使用路径选择函数的功能,用户自由选择要处理的测试数据,并计算出测试结果。
使用Lab VIEW平台下的Read Test VI,选择要处理的测试数据。读取所存储的数据后,根据存储协议,提取测试项目并计算所需的测试数据的相应列,数据的计算和处理要以汽车操纵稳定性指标极限值和评估方法为计算标准[8]。
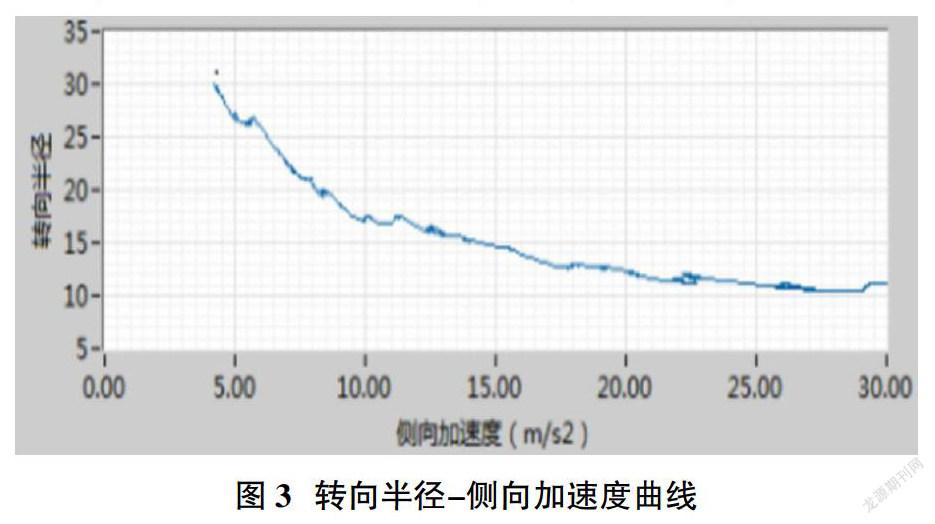
因为光纤陀螺仪的输出是脉冲输出,所以测量角速度时会有很大的噪声。噪声是一个随机误差,其平均值为零,它是叠加在正常输出上的,其量级约为1.5°/h,远远超过了光纤陀螺仪精度0.5°/h的量级。因此,对于采集到的角速度,在数据处理过程中,首先对数据进行1s的窗口平滑平均处理,以消除随机噪声的影响[9]。在计算车辆转弯半径的过程中,有必要对车辆前进速度和转向角速度进行三次插值样条拟合,根据采集到的数据,依据上式计算仿真过程中各点的转向半径,得到的汽车转向半径与侧向加速度的曲线[10]。
处理过的数据可以以LabVIEW的读取表的形式进行读取,输出的曲线分别为图3、图4、图5所示。
2.2.3 稳态回转性能的评价
根据文献[5]的定义和要求,侧向加速度越大,表明在转向过程中,汽车的操纵稳定性越好,转向翻车的可能性也就越小;侧向加速度值越小,表明汽车出现过度转向就过快,从而导致翻车。车身侧倾度越大,汽车的安全性就越差,侧倾值过大,将直接导致汽车失去控制。尽管汽车都具有不足转向的特性,但不足转向特性并不是越大越好,因为不足转向越大,转向侧向力越弱,这不利于汽车的操纵性;如果较小,则汽车转弯时会更早的进入不稳定状态,操纵稳定性好的汽车应具有适度的不足转向特性[11]。
上述结果可知,图3为转向半径与侧向加速度曲线,由图可以看出,此车为中性转向汽车,转向半径始终大于R0,中性转向点的侧向加速度值的评价计分值为100[7]。
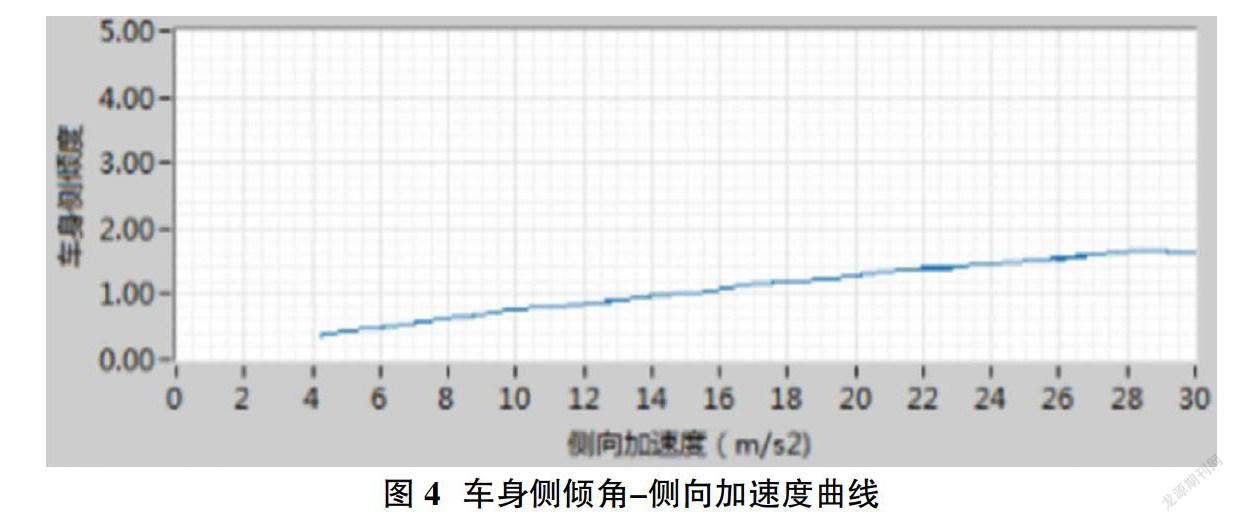
图4为车身侧倾度与侧向加速度曲线,可知,当侧向加速度an值为2m/s2时,所以不足转向度U为0.42/[(°)/(m/s2)]。
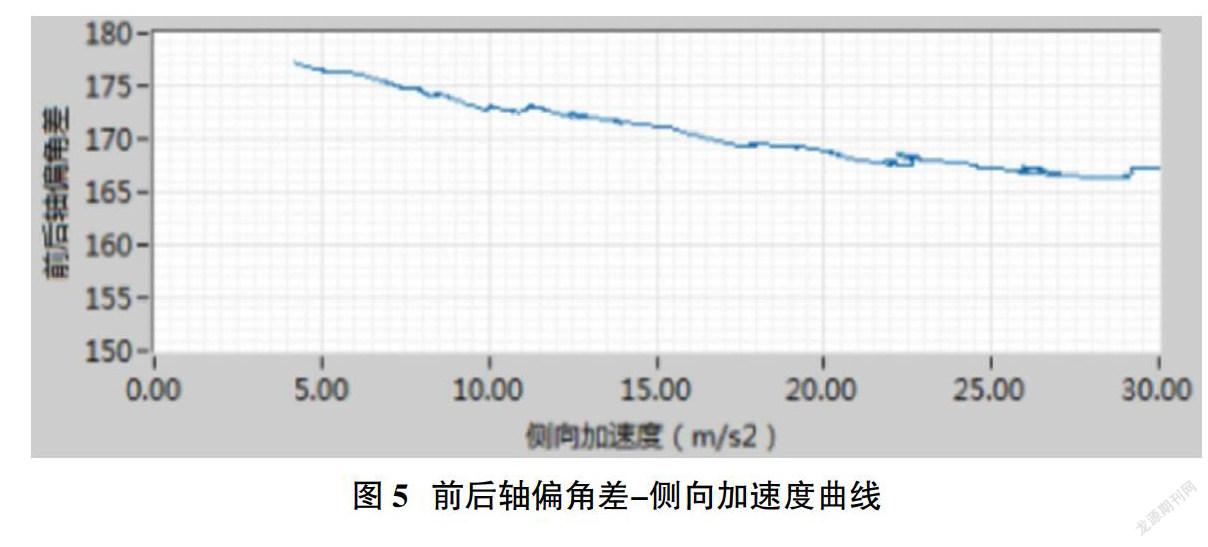
图5为前后轴偏角差与侧向加速度曲线,可知,当侧向加速度an值为2m/s2时,车身侧倾度K?覫为0.48/[(°)/(m/s2)]。
表1描述了稳态回转性能的质量,得分值越高,表明该项目越好;得分值越低,表明该项目越糟糕。从表中分析可以得出:不足转向度U指数和车身侧倾度指数不高,并且偏离了理想值,因此可以有针对性地调整参数使其接近理想值,从而提高汽车的操纵稳定性。
3 结论
使用LabVIEW进行数据处理和分析,处理数据过程中的工作量将会被极大的降低,同时可以将大量的手工图转换为基于LabVIEW的虚拟仪器技术来绘制工程图以提高效率,使得到的图线更加的精准。
经过计算和分析中性转向点的侧向加速度、不足转向度U以及车身侧倾度三个评价指标,得出稳态回转试验的综合评价计分值,表明了该试验车辆具有不足转向特性。
该研究为将来的数据处理分析提供了一定的借鉴作用,并为调整参数以提高汽车操纵稳定性提供了依据。
参考文献:
[1]宗长富,郭孔辉.汽车操纵稳定性的研究与评价[J].汽车技术,2000,6(6):6-11.
[2]熊庆.基于LabVIEW的汽车操纵稳定性测试系统的研制[D].南宁:广西大学,2008.
[3]余志生.汽车理论[M].四版.北京:机械工业出版社,2007.
[4]雷振山.LabVIEW7实用技术教程[M].北京:中国铁道出版社,2004:16-36.
[5]GB/T6323.6-2014,汽车操纵稳定性指标与评价方法[S].
[6]郑红梅.汽车稳态回转试验信号实时处理系统的研究[J].合肥工業大学学报(自然科学版),2000,23(2):241.
[7]Rick Bitter,aqi Mohiuddin,Matt Nawrocki.LabVIEW Advanced Programming Techiniques[M].CRC Press, 2001.
[8]徐延海,李永生,巢凯年,等.利用LabVIEW进行基于GPS的汽车道路试验系统的开发[J].机械与液压,2010,38(7):74-76.
[9]廖芳,王承.基于虚拟技术的汽车操控稳定性研究[J].传动技术,2005,19(2):36-42.
[10]张创,吕妍红,陈更达.基于LabVIEW的汽车操控测试软件的设计与实现[C]//北京:北京航空航天大学,仪器科学与充电工程学院,2013:105-107.
[11]姜立标,侯文超,谷方德.基于正交试验的汽车稳态回转性能仿真[J].北京航空航天大学学报:自然科学版,2011,37(8):969-972.
