大学生方程式巴哈车前悬架系统的仿真分析
2020-09-10 03:04韩金龙胡大志
内燃机与配件 2020年1期
关键词:仿真分析
韩金龙 胡大志
摘要:悬架系统是汽车行驶系的重要组成部分,对汽车的操纵的稳定性和行驶的平顺性有直接关系。本文基于ADAMS/car 模块对方程式巴哈赛车前悬架的特性进行了仿真,根据仿真结果的曲线对相应的悬架参数变化对汽车性能的影响进行了分析。研究后结果表明,赛车的前悬架初期设计的参数存在不理想之处,仿真的结果为改善方程式赛车操纵稳定性提供改进方法和思路。
关键词:巴哈车;前悬架;ADAMS;仿真分析
0 引言
中国大学生巴哈大赛实际上是中国汽车工程学会巴哈大赛,全称为BajaSaeChina,简称BSC,参赛队伍由全国各高校、职院的在校生组成,参赛的Baja车按赛会章程规定由参赛队伍自行设计、制造和调试。赛事采用静态赛和动态赛相结合的方式。静态项目包括技术检查和设计答辩。动态项目包括牵引力测试、爬坡测试、操控测试和4小时耐力测试。
从赛事安排看,巴哈车的动态测试项目主要是汽车行驶在崎岖的路面上,路况恶劣,这对汽车的操纵性和平顺性的提出了很高要求。
悬架是现代汽车上的重要总成之一,悬架的匹配设计在汽车设计开发中占有重要的地位,对汽车的底盘性能影响巨大,直接影响汽车的性能。理想的悬架系统运动特性,不仅可以缓和由崎岖路面传给车身(或车架)的冲击,衰减由此造成的承载系统的振动,保证乘坐的舒适性;而且可以保证汽车在崎岖路面行驶时的操纵稳定性。汽车悬架在传递作用在车轮和车身(或车架)之间的力和力矩时,悬架的构件将会发生变形,从而引起汽车的定位参数和轮距发生变化,这些参数的变化均对汽车的行驶平顺性和操纵稳定性有直接影响[1]。
在多体动力学仿真软件ADAMS的car模块中,先建立车辆各子系统模型,再将其组装成总成或整车模型,这些模型的精度较高,也可对已有的模型进行适应性修改;模塊中仿真动画功能为直观、定性地评价各工况下车辆的悬架性能提供了有效的手段;在ADAMS/PostProcessor模块中有多种悬架特性可被输出[2],所以该软件在车辆设计开发中得到广泛应用。
本文基于ADAMS/CAR模块对方程式赛车有着强大的数据分析能力,对一种BSC赛车的双横臂式前悬架进行了仿真,对赛车的开发与完善提供了一种直观的方法。
1 前悬架仿真刚体模型的建立
本文利用adams/car模块建立仿真刚体模型,刚体模型建立前首先对前悬架进行以下简化和假设[2]:
①除了悬架的各连接处可定义弹性特性外,悬架系统各零件及车身(或车架)都假设为刚体,其变形忽略。
②车轮简化为刚体,车轮变形忽略。
③零部件之间内部间隙不计,其连接均简化为铰链。
④仿真时假设车身(或车架)相对地面静止。
根据实际前悬架系统结构建立前左悬架刚体模型,右悬架和左悬架对称,adams/Car软件可自动生成另一半模型。本文所涉及的车型在设计过程重点考虑汽车的操纵性和通过性,所以悬架系统的铰接点的橡胶支承可以少用和不用,这样假定所研究的前悬架为一个多刚体系统。
仿真模型建立后,需要定义系统模型的绝对坐标系。坐标系除以两前车轮与地面接触印迹中心点连线的中点作为坐标原点外,坐标轴及其正负向确定方法与绘制汽车总布置图时确定坐标系的方法一致。
2 仿真及结果分析
2.1 双横臂悬架仿真
对悬架进行动力学仿真分析前,需要先定义与前悬架系统分析相关的车辆参数,主要参数如下:轮胎的自由半径、轮胎垂向刚度、簧上质量、轴距、质心位置等;然后选择典型分析工况中的两侧车轮同向跳动作为仿真试验工况,仿真步数为149步,车轮跳动范围-50~50mm;仿真结束后在ADAMS/PostProcessor模块中调用绘图特性文件,输出仿真动画、多种有关悬架性能的参数变化曲线,评价悬架系统的特性[3]。
2.2 悬架性能参数仿真结果分析及评价
以下是该前悬架系统性能参数在悬架行驶运动、侧倾运动的变化规律进行仿真分析的结果,并对这些结果对巴哈车的操纵稳定性能的影响进行了评价[4]。
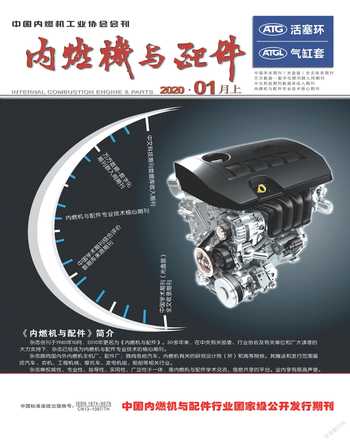
2.2.1 车轮外倾角(Camber Angle)
在分析前轮定位参数变化时,首先考虑车轮外倾角和主销后倾角的变化特性。
一般希望在所确定的车轮跳动范围内,车轮相对车身跳动所引起的外倾角的变化量在±1以内,同时当车轮处于平衡位置时,外倾角的初始值采用弱负值[1]。
由图1可见,当车在静平衡位置处的时前轮外倾角为0.4°,略大于零;车轮从-50mm向+50mm跳动过程中,车轮外倾角变化曲线的斜率逐渐减小,变化范围-0.5°~1.525°。
从分析结果看,车轮上下跳动时,外倾角的变化基本在理想范围内,变化趋势也是理想的,但平衡位置处的车轮外倾角需要优化,以提高汽车转向时的抗侧倾能力。
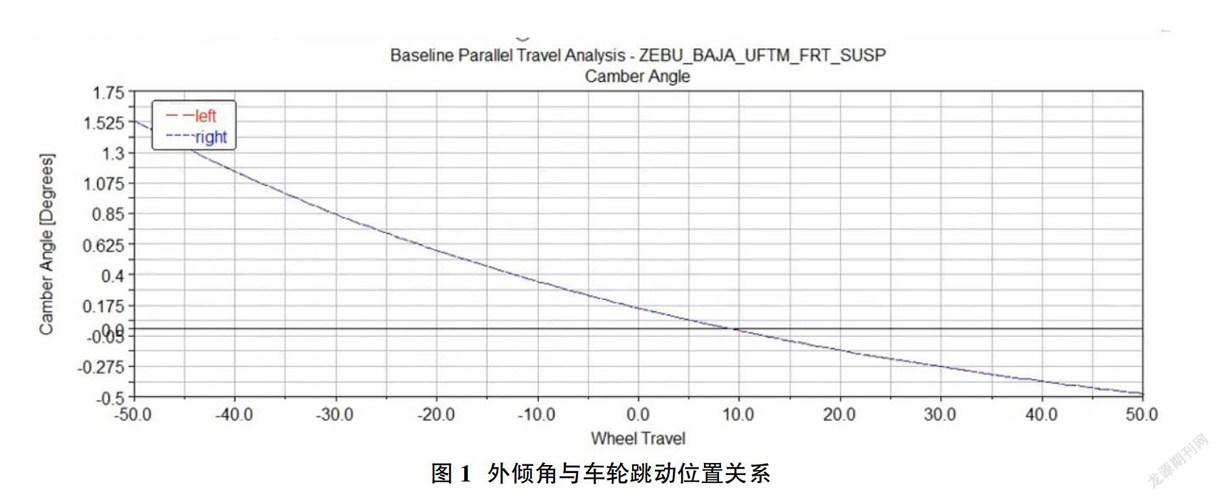
2.2.2 主销后倾角(Caster Angle)
车轮定位参数主销后倾角在车轮跳动过程中变化不能太大,否则会使转向系统对侧向力比较敏感,易造成车轮摆振。对乘用车而言,主销后倾角的初始值不可太大也不可太小,否则会使转向变得沉重或转向后转向盘自动回正能力变弱,造成车的操纵性不理想。对于乘用车,一般理想的主销后倾角初始值设置为-1~+2范围内;车轮上跳时,悬架每压缩10mm,后倾角在10°~40°之间变化[1]。
从图2中可以看出,在静平衡位置处的主销后倾角约为11.209°;车轮上跳时,后倾角在11.209°~11.236°范围内变化,变化范围很小,比较理想;但车轮跳动范围在35~50mm之间跳动时,呈现比较明显的非线性变化,这种变化趋势需要优化。
2.2.3 主销内倾角(Kingpin Inclination Angle)
一般为了使主销内倾角对车的操纵性影响控制在合理的范围内,随着车轮的上下跳动,其变化范围控制在-7~-13之间[5]。
图3为主销内倾角的仿真曲线。当车轮上跳时,主销内倾角逐渐增加;主销后倾角随着车轮的跳动,其变化范围为-12.6°~-10.23°,在理想的范围变化,且变化范围不大。
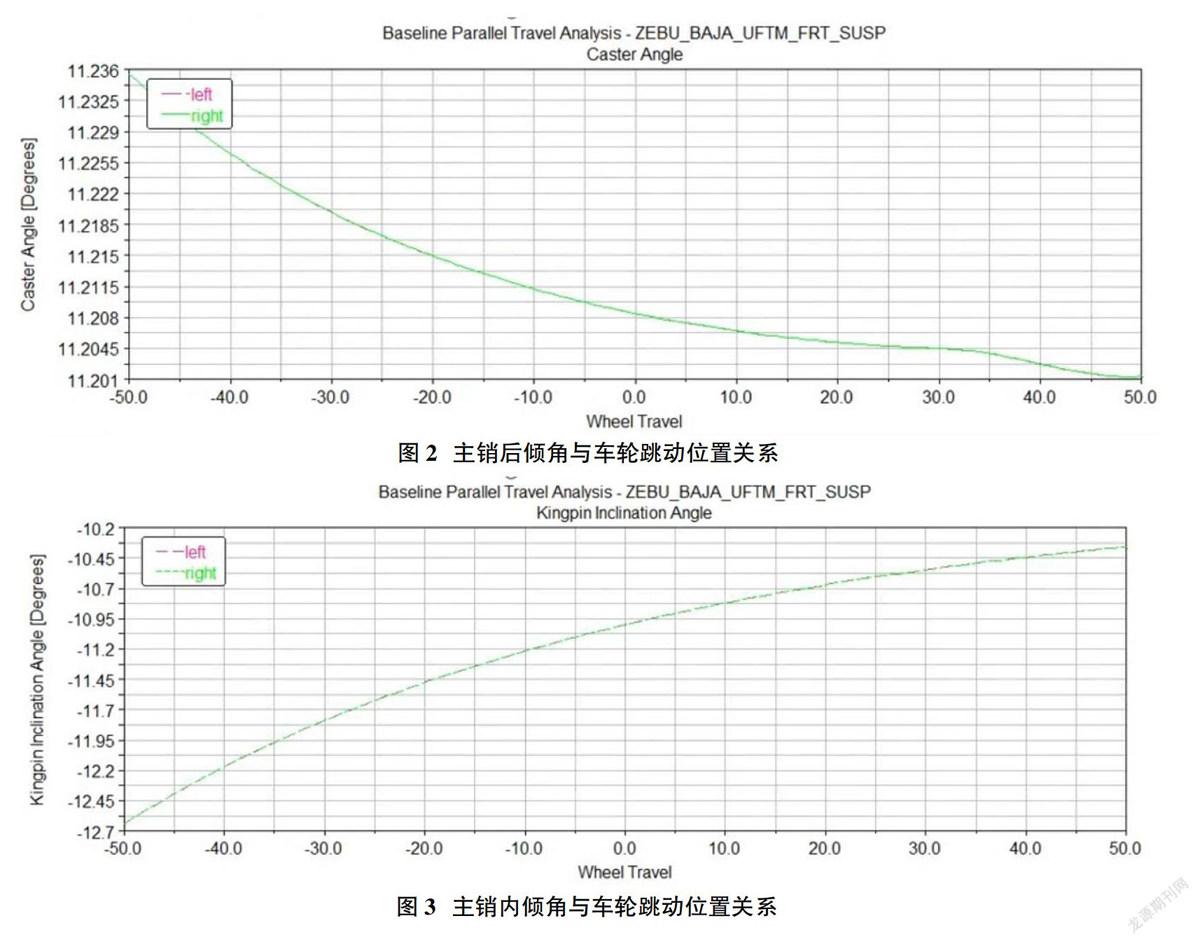
2.2.4 车轮前束角(Toe Angle)
由于巴哈车动态测试项目主要在崎岖路面上行驶,所以为了控制因路面不平输入引起的前束變化过大,在设计前束角时,在车轮静平衡位置处车轮前束角设计为零或者成弱负角,可保证汽车具有良好的直线行驶稳定性和不足转向特性;车轮上跳时,前束角变化控制在0~-0.5范围内,车轮下跳50mm时,前束角变化控制在0~0.5范围内[6]。
图4所示为该车的前轮前束与车轮跳动位置关系。图中,前束角变化曲线显示出:在车轮上跳时从正值趋向负值;在静平衡位置时,前束值为-0.081°,可保证车具有良好的直线行驶稳定能力;车轮从静平衡位置到最大上跳位置之间跳动时,前束在-0.081°~-0.213°范围内变化,为弱负前束,使车辆获得弱的不足转向特性;但车轮在±50mm范围内跳动过程中,前束在-1.15°~1.1°范围内变化,超出理想变化范围,需要对车轮的前束值进行优化。
2.2.5 侧倾外倾系数(Roll Camber coefficient)
侧倾系数为0.61~0.88(°/°)时,为不足转向。图5显示仿真结果为0.7°~0.93°,为不足转向。
2.2.6 主销偏移距(Scrub Radius)
主销偏移距与主销内倾角有密切关系,悬架设计时需要控制主销偏移距绝对值大小,因为其大小会影响驾驶员对方向盘的控制能力及汽车直线行驶稳定性,进而严重影响汽车行驶过程中的安全性。
从图6可以看出,车轮上下跳动过程中,主销偏移距的变化在3.5~10.3mm范围内,变化范围不大。
3 结束语
本文通过ADMAS/car建立了巴哈车汽车双叉臂式前悬架仿真模型,通过进行双轮同向跳动实验工况下的悬架特性参数的变化仿真分析,得出悬架的特性参数的变化基本合理,车轮的主销后倾角和前束值两个定位参数随着车轮跳动的变化关系均有不同程度的不在理想的范围变动情况存在,表明悬架参数设计上存在需要改进之处,下一步可以通过与实车实验相结合,优化悬架设计参数,使汽车具有良好的操纵稳定性和行驶平顺性。
参考文献:
[1]刘涛.汽车设计[M].北京:北京大学出版社,2008.
[2]俞凡.汽车动力学及其控制[M].北京:人民交通出版社,2003.
[3]戴逢权.多连杆悬架系统性能仿真研究[D].武汉:武汉理工大学,2011.
[4]赵又群,郭孔辉.汽车操纵性评价指标的研究[J].汽车工程,2001.
[5]张智,施晓芬,李俊文.汽车悬架系统的运动仿真及优化设计[J].机械设计,2015,F32(9):30-33.
[6]王文.麦弗逊式前悬架运动学分析及优化研究[D].华南理工大学,2013.
基金项目:2018年浙江省大学生科技创新活动计划暨新苗人才计划项目“巴哈越野车悬架系统仿真分析及优化”,编号:KZS1810046。
作者简介:韩金龙(1997-),男,浙江温州人,机电工程专业在校生;胡大志(1964-),男,湖北武穴人,高级工程师,研究方向为车辆工程。
猜你喜欢
科学与财富(2016年18期)2016-12-22
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科技视界(2016年15期)2016-06-30
科技视界(2016年8期)2016-04-05
科技视界(2016年7期)2016-04-01
中国市场(2016年8期)2016-03-07
光学仪器(2015年1期)2015-07-30