
城市轨道交通无人驾驶模式下的列车自动防护系统设计
2020-09-12 14:04陈启香
科技风 2020年23期
摘 要: 在分析了现有列车驾驶模式及传统列车自动防护系统功能的基础上,提出无人驾驶模式下的车载列车自动防护系统概念,设计了列车自动防护系统的框架并定义了其功能,初步探讨了其与关联系统之间的信息交互。该系统叠加在现有信号控制系统之上,进一步保证无人驾驶模式下列车的运行安全。
关键词: 无人驾驶;列车自动防护;信息交互
中图分类号:U285
Abstract: Purposes—An overview of the state of the train driving mode and traditional train automatic protection system are presented,the onboard automatic train protection system is introduced.Method—System architecture and function are presented,and information exchange between association systems are contrasted.Results—As a safety overlay system of train control system,ATP can increase the safety of driverless train efficiently.
Key words: Fully automated and driverless;Automatic Train Protection(ATP);Information Exchange
1 概述
随着车辆设计技术、信号和通信技术、计算机技术、系统集成技术等的完美结合,使得全自动无人驾驶地铁,成为交通技术上的一次质的飞跃,引领城市轨道交通的发展方向。正是如此,世界上许多城市地铁正在将既有的传统非全自动模式系统改造成这种全自动模式[1-2]。本论文对城市轨道交通无人驾驶模式下的列车自动防护ATP系统进行研究,提出一种车载ATP系统的设计方案,对ATP系统的构成、与其他信号系统的连接等进行设计,确定该系统的功能方案。
2 ATP系统方案初步设计
本论文设计的ATP系统是一种车载子系统,用于直接保证列车的运行安全,实现对列车安全的全部防护,因此在设计时必须满足故障—安全原则[3]。
ATP主要保护行车安全,为ATO自动驾驶提供信息及安全防护,为DMI信息显示提供条件,ATP子系统还将自身的运行数据及故障报警信息发送到车载记录系统,并能够实时在线输出故障信息,以便进行故障分析和诊断[4]。
2.1 功能设计
有人驾驶的ATP系统,列车在ATP防护下,发车由司机触发,采用列车自动控制系统ATO驾驶实现列车在区间自动运行和站台定位停车,列车的关门、启动与故障复位由司机操控[5]。
无人驾驶模式下的ATP要实现列车在CBTC运营模式或点式ATP运营模式下,实时获取速度位置移动授权等信息,对列车运行进行实时防护。即列车启动、运行的实时监控、车门开关、列车的制动等,完全由列车自动防护系统完成。因此应具备以下基本功能:实时测速、定位与车距推算;移动授权处理;安全制动模型的计算;牵引切除控制;车门监督与控制;站台门/车门联动控制;障碍物/脱轨处理。
2.2 结构设计
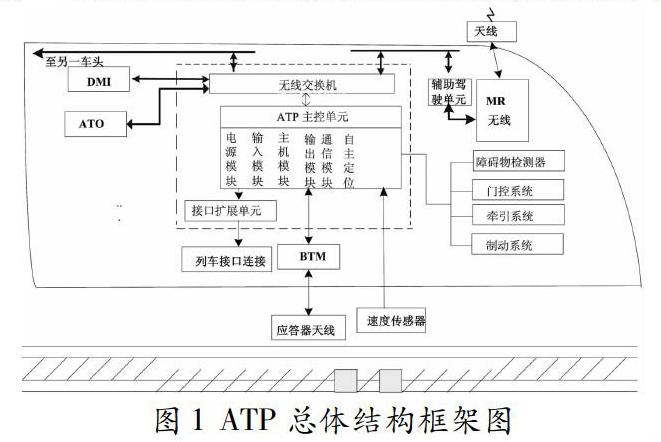
依据ATP系统的功能分析,系统的总体结构图如图1所示。
由图1可知,ATP系统主要包括:ATP主控组匣、数据交换设备、接口扩展部分、辅助驾驶单元、人机界面、车载移动無线设备MR等。ATP主控单元主要由主机模块、输入输出模块、通信模块等组成。ATP通过相关接口与其他系统相连,主机模块将采集、接收到的数据处理后,通过软件接口提供至应用软件。应用软件进行数学计算和逻辑处理,将输出数据通过软件接口传送至主机模块底层软件,底层软件经安全表决和计算形成安全数据,经通信总线发送至输出模块或外部设备。
2.3 关联系统
2.3.1 关联关系图
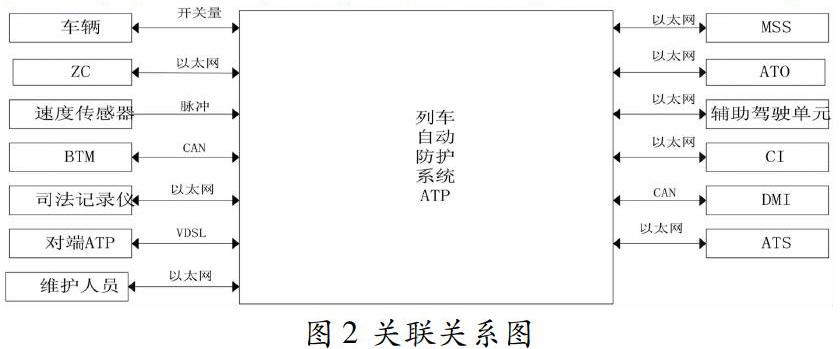
ATP系统功能的实现,需从其他系统获取相应的信息,因此ATP系统要与其他系统进行关联,关联关系图如图2所示。
2.3.2 关联系统描述
(1)ATO。ATO系统根据列车当前的速度、位置、与前车的距离,结合线路参数及列车自动监控系统ATS的控制命令,在ATP的安全防护下,控制列车运行及开关门等,使列车安全、舒适、高效的运行。
(2)ZC。ZC根据联锁信息和列车位置信息计算列车移动授权。车载ATP通过无线媒介接收ZC发送的移动授权和无人自动折返按钮等信息,同时向ZC发送列车速度、列车运行方向、列车级别及驾驶模式、列车位置等信息。
(3)CI。CI实现进路、道岔和信号机等设备的联锁控制,按照运营要求为列车办理进路。车载ATP通过无线媒介接收CI发送的站台门状态信息,同时发送站台门控制命令至联锁,实现站台门与车门的联动控制。
(4)辅助驾驶单元。完成车辆供电,接收外部命令,对整车进行休眠、唤醒等控制。
(5)ATS系统。ATS实时监督和控制列车,调整列车运行以满足时刻表要求,并为运营服务提供调整数据,从而最小化无规律干扰的影响。车载ATP通过无线媒介接收ATS发送的表号、车次号、车组号信息,跳停、扣车信息,下一站运行等级和停站时间,远程联动等信息。同时向ATS发送列车运行速度及方向、列车驾驶模式、列车车门状态、列车扣车状态和相关报警等信息。
(6)信号设备维护支持系统MSS。MSS记录各信号子系统的维护与报警数据信息。车载ATP通过通信接口向MSS子系统发送维护及报警数据。
(7)DMI系统。DMI在人工驾驶模式下显示运行相关的信息辅助司机驾驶。车载ATP通过通信接口接收DMI发送的试闸、广播测试、无线测试等信息;同时向DMI发送列车当前速度、紧急制动速度、推荐速度、目标速度/距离、当前驾驶模式、运行等级、列车完整性、车门/屏蔽门状态、牵引/制动状态等信息。
(8)速度传感器。速度传感器测量列车速度。车载ATP通过硬线方式获取速度传感器的脉冲信息,进而计算出列车的运行速度和运行方向。
(9)应答器传输模块BTM。BTM获取应答器报文并发送给ATP设备。车载ATP通过CAN总线的通信接口接收BTM发送的应答器报文信息;同时向BTM发送申请报文等信息。
(10)车辆。车载ATP通过电平方式/触点方式采集列车接口中的输入信号,并输出制动信号,切除牵引和门控信号以控制列车的运行。
车载ATP系统初与上述系统关联并进行信息交换,还需维护人员烧录车载ATP所用线路相关数据;需安装司法记录仪记录车载ATP设备的工作状态、驾驶模式、ATP输出及司机操作等信息。
3 结语
为了保证无人驾驶模式下列车的运行安全,本文提出了车载列车自动防护系统,跟传统有人驾驶列车的控制系统功能相比较,无人驾驶ATP的功能进行了重新定义,新增障碍物监测及脱轨处理等新功能;结合无线通信新技术、先进的定位技术等,设计了ATP的总体结构框架图;为完成ATP的基本功能,最后讨论了ATP与其他系统间的信息交互。
参考文献:
[1]任安萍.浅谈我国全自动无人驾驶地铁的发展[J].科技视界,2012,25(9):207-211.
[2]劉攀峰,邱昕夕,陈祥献.城市轨道交通列车自动防护系统软件设计[J].计算机程,2012,38(19):1-5.
[3](加)B.S.迪隆.丁川,鲁光泉,王云鹏,译.交通运输系统的可靠性与安全性[M].北京:机械工业出版社,2018:138-153.
[4]张建平.城市轨道交通列车运行自动控制系统[M].成都:西南交通大学出版社,2017:50-73.
[5]高嵘华,郑泽熙.轨道交通全自动运行系统对CBTC功能需求的研究[J].自动化与仪器仪表,2018,29(9):5-10.
基金项目: 陕西省教育厅科研计划项目资助(编号:19JK0043);宝鸡文理学院校级重点项目(编号:ZK2017006)
作者简介: 陈启香(1988—),女,甘肃白银人,硕士研究生,讲师,主要研究方向为铁路信号与通信。
猜你喜欢
人民交通(2020年5期)2020-05-03
科学大众(中学)(2017年3期)2017-07-06
科技与创新(2016年21期)2017-02-14
人民论坛(2016年22期)2016-12-13
军事文摘·科学少年(2016年8期)2016-11-02
中国市场(2016年27期)2016-07-16
现代交际(2016年12期)2016-07-09
电脑知识与技术(2016年6期)2016-06-06
课外语文·下(2015年7期)2015-08-28
环球时报(2014-02-27)2014-02-27
