
汽车总线技术的发展
2020-09-14 12:17汪伟
时代汽车 2020年15期
汪伟


摘 要:本文根据汽车总线技术的发展进程及其应用现状,分别对CAN总线、LIN总线、MOST总线、FlexRay总线的特点、报文形式、应用领域进行了系统性及归纳性的总结,通过图示将报文的组成、格式、作用进行了详尽的说明,并结合了整车实际应用中的典型网络拓扑对各总线的特征、优势、缺陷进行对比。
关键词:总线特点 总线报文 总线应用
1 引言
随着科学技术的飞速发展,人类的需求不断提高,汽车相关电子技术正逐步向电动化、智能化、网联化、共享化方向发展。为了使车内传感器与控制器,控制器与控制器之间实时进行信息交互,传统的硬线连接已经无法满足需求。汽车总线技术不仅可以满足汽车设备连接要求,而且具有很强的扩展能力,具有广阔的发展应用前景。
2 传统硬线连接信息交互
在汽车技术发展初期,控制器及传感器较少,传感器给出的信息大多以简单的高低电平或者是脉冲信号为主,采用点对点的单一通信方式,相互之间少有联系。但是随着汽车电子技术的逐步发展,传感器技术的发展及车身控制器的增多,仍采用硬线连接进行信息交互,这样必然会形成庞大的布线系统,不仅传输速率慢,而且线束成本高,不适应汽车轻量化及低成本要求。
3 CAN(Controller Area Network)总线
CAN总线(控制器局域网)是德国博世公司在80年代初期开发的一种串行数据通信协议,是多主总线,其通信介质主要有双绞线、同轴电缆、光导纤维。
3.1 CAN总线特点
遵循国际标准ISO11898协议;通信速率最高可达1Mbit/s;数据通信没有主从之分;当多个节点同时发起通信时,优先级低的节点避让优先级高的节点;协议本身对节点的数量没有限制;总线上节点的数量可以动态改变,组网相对灵活;
3.2 CAN总线报文
CAN总线报文的数据交换模式:节点A向节点B发送远程帧请求,节点B收到后向节点A反馈同一标识符的数据帧。
3.2.1 数据帧
CAN总线中的数据帧分标准帧和扩展帧。其中标准帧的帧ID长度是11位,帧ID的范围是0x 000-7FF。为支持总线节点扩展,可进行ID的扩展。扩展帧的帧ID长度是29位,其帧ID的范围是0X 0000 0000-1FFF FFFF[1]。
3.2.2 远程幀
远程帧的报文格式是依据对应的数据帧格式而来,故可分对应标准数据的远程帧和对应扩展数据的远程帧,在扩展帧报文格式的基础上去除数据场便得到对应扩展数据的远程帧报文。
3.3 CAN总线应用
在汽车实际应用中CAN总线一般分为高速CAN和低速CAN。高速 CAN传输速率为500kbps,其主要用于ABS、变速控制、发动机控制、转向控制、悬架控制等模块的信号传输;低速CAN传输速率为125kbps,主要用于故障诊断、驾驶信息、电子仪表、自动控制、安全气囊等模块的信号传输。
4 LIN(Local Interconnect Networks)总线
LIN总线(局域互联网络),于1998年10月在德国被首次提出。LIN总线是一种低成本的串行通讯网络,可用于实现汽车的分布式电子系统控制。LIN总线为现有汽车网络(如CAN 总线)提供辅助功能,使用LIN 总线会大大节省成本[2]。
4.1 LIN总线特点
遵循国际标准ISO9141协议;使用12 V的信号线;通信速率最高可达20 Kbit/s;单个主控器和多个从设备模式,无需仲裁机制;在其总线网络上,最多12个节点;在不需要改变LIN总线从节点的硬件和软件基础上,可以在网络上增加网络节点。
4.2 LIN总线报文
报文帧由帧头和应答组成,当主节点发送帧头,从节点在收到帧后,对帧头进行分析然后决定是发送应答,接受数据,还是不响应。帧头包括:同步间隔段、同步段、受保护ID段。应答包括:数据段、校验和段。“0”为显性,表示有数据发送;“1”为隐性,表示各节点没有数据发送。同步间隔至少需持续13位,标志一个帧发送的开始。
4.3 LIN总线应用
LIN总线在整车中主要应用领域为:⑴车顶:天窗控制,信号灯控制,光敏传感器,湿度传感器;(2)驾驶舱:座椅调节、方向控制开关、电动门窗、空调、灯光照明;(3)发动机机舱:转速传感器、主动进气格栅、发电机。
5 MOST(Media Oriented Systems Transport)多媒体定向系统传输
MOST总线(多媒体定向系统传输),宝马、戴姆勒克莱斯勒等公司在1996年展开合作,在D2B(家用数字)总线的基础上对MOST总线技术进行研究。通过光缆,在一个环形结构进行信息娱乐控制单元间数据交换,但传输只能朝一个方向进行[3]。
5.1 MOST总线特点
MOST总线不具备正式的标准;通信速率最高可达150 Mbit/s;用于图像、声音的实时处理;可采用星形和环形拓扑,而汽车应用中基本采用环形拓扑;一个主节点及多个从节点,主节点负责与外部信息交互及网络控制管理,从节点可提供一种或多种网络功能;在其总线网络上,最多可以有64个节点。
5.2 MOST总线报文
在MOST总线网络传输当中,每个传输块含有16个数据帧,每个数据帧含2字节的控制数据域。故每个块中共有32字节控制报文,报文可传输控制命令、状态和诊断消息。总线报文由仲裁位、目的地址位、源地址位、报文类型、数据域、CRC校验位、应答位和保留位组成。数据域又包含了功能块标识符、功能块实例、函数标识符、操作类型、报文标识符、报文长度及数据[4]。其中,数据域应用协议的数据格式,17字节中只有12字节用于参数传递;如果是多段消息,第1个字节还被用作报文计数,则只有11字节进行参数传递。
5.3 MOST总线的应用
MOST总线由于传输数据量大,损耗小,速度快、抗干扰性强,故多应用于汽车多媒体娱乐系统、汽车GPS导航系统,车载电话等。
6 FlexRay总线
FlexRay总线是为应对汽车线控技术对数据传输高速、可靠性高和确定性高的要求,由戴姆勒奔驰、宝马等公司1999年推出,具备故障容错能力。其还具备冗余通信能力,支持各种拓扑结构,常被用于需要持续及高速性能的场景[5]。
6.1 FlexRay总线特点
FlexRay总线是汽车工业的事实标准;支持两个信道,每信道的速度可达到10 Mbit/s,总传输速率为20Mbit/s;网络拓扑结构可以采用星型结构、线型结构、混合结构;中心节点负责转发信息,当除中心节点外的某个节点线路故障或损坏时,中心节点可以断开与该节点的通信。而中心节点损坏时,则整个总线便无法正常工作。
6.2 FlexRay总线报文
在FlexRay总线中,一个完整的消息帧包括帧头、数据段和帧尾三部分组成。其中帧头由保留位、数据指示位、空帧指示位、同步帧指示位、起始帧指示位、帧标识符、数据长度、帧头CRC校验和周期计数九部分组成[6],详见图1。
6.3 FlexRay总线的应用
FlexRay总线重要应用之一,就是线控制动、线控转向等。它们是利用有容错功能的电子、电气系统取代原液压、機械部分。线控操作包括从转向到加速和刹车等所有汽车控制应用中的关联技术。
7 结语
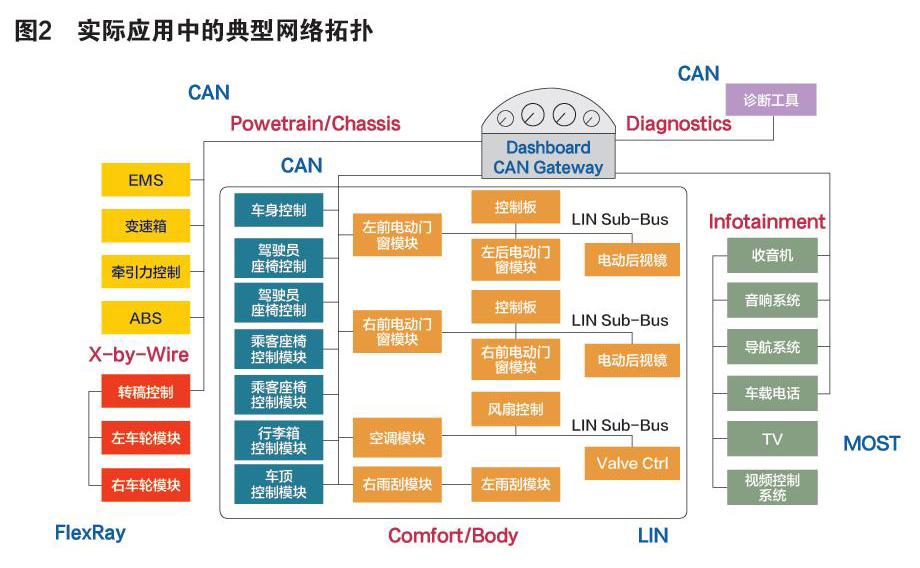
综上所述,汽车总线网络主要有CAN、LIN、MOST、FlexRay 4类总线,其在整车中的实际应用及典型网络拓扑见图2。
根据汽车总线的类型及其特点,可将汽车总线大致分为A、B、C、D四类,其相关对比及总结[7],见表1。
现代汽车网络应用实例当中,多以CAN总线为主,LIN总线则作为CAN总线的一种辅助总线网络,MOST也被逐渐应用在了车载信息娱乐系统中,并在局部线控操作系统中开始进行FlexRay的研究和应用。
随着人们对车辆需求越来越多,要求的汽车功能也越来越高,使得汽车产业及汽车电子电气产品不断改造升级。为适应这一发展趋势,亟需高速、实时、可靠、高带宽的汽车总线,进而满足汽车电动化、智能化、网联化、共享化方向发展需求。本文概述了总线系统的发展进程、各总线的特点、报文格式及相关应用领域等内容,为深入了解汽车总线技术奠定了基础。
参考文献:
[1]王文蓉,陈瑞. 基于CAN总线的汽车智能网关/节点的设计[J]. 自动化与仪器仪表, 2012,(3):71-73.
[2]韩震,初洪超. LIN总线技术解析与应用[J]. 汽车实用技术, 2018,(21):142-144.
[3]韦志魁,韩小伟. 汽车总线技术分析[J]. 内燃机与配件, 2018,(9):89-90.
[4]秦贵和,黄永平,许冰,董劲南. MOST汽车多媒体网络[M]. 北京:北京理工大学出版社,2010,19-25.
[5]阎树田,黄新春,康会峰. 基于 FlexRay总线的嵌入式汽车线控制动技术研究[J]. 计算机测量与控制,2009,(3):487-489.
[6]许张义,张桂香,周聪. 线控转向中FlexRay总线的应用[J]. 电子测量与仪器学报, 2013,(3):258-263.
[7]孙乐春.汽车总线系统初探[J].山东工业技术,2014,(18):12.
