基于Halbach阵列爬壁机器人永磁吸附装置有限元分析*
2020-09-17 05:06张春光张俊峰杨煜兵刘嘉瑞李上青刘佳慧王紫涵
机械研究与应用 2020年4期
安 磊,张春光,褚 帅,张俊峰,杨煜兵,刘嘉瑞,李上青,刘佳慧,王紫涵
(沈阳仪表科学研究院有限公司,辽宁 沈阳 110043)
0 引 言
目前,船舶除漆普遍采用的方法是人工干喷砂除漆,存在污染严重、高空作业危险、尘肺病危及健康、劳动强度很大等弊端[1]。为了消除人工干喷砂的种种弊端,出现了船舶除漆爬壁机器人。按照行走方式的不同,爬壁机器人可以分为履带式、轮式和步行式;按照吸附方式的不同,可以分为真空吸附、磁吸附和推力吸附[2-5]。笔者设计了一种采用永磁吸附和轮式行走方式的船舶除漆爬壁机器人,利用永磁体与船舶钢板壁面产生的磁力使机器人吸附在船体表面上。永磁吸附装置是爬壁机器人的重要子系统,为了确保爬壁机器人可靠的吸附于船舶钢板壁面,在传统型永磁体的基础上设计了基于Halbach阵列的永磁吸附装置,对两种永磁吸附装置的磁场进行分析对于机器人可靠工作具有重要的意义。
1 爬壁机器人永磁吸附装置基本结构
图1为船舶除漆爬壁机器人整机三维结构模型,主要包括行走部、本体部、喷盘部。
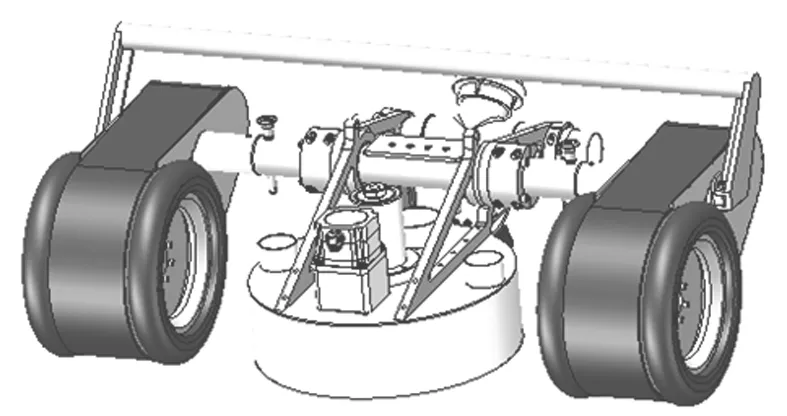
图1 船舶除漆爬壁机器人
图2为爬壁机器人行走部三维模型,爬壁机器人左右两侧各有一行走部,每个行走部有两个轮胎,伺服电机和减速机安装在轮胎之间,永磁吸附装置安装在减速机下方的安装板处。图3为爬壁机器人永磁吸附装置。
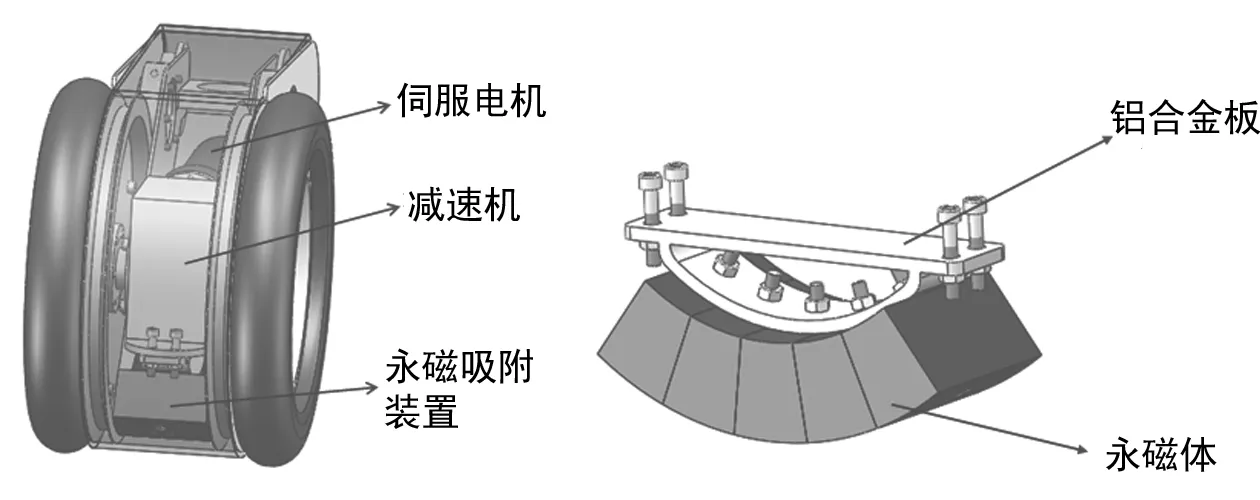
图2 船舶除漆爬壁机器人行走部 图3 船舶除漆爬壁机器人永磁吸附装置
永磁吸附装置由永磁体、铝合金板等组成,永磁体有5块,形状为扇形,通过螺钉安装在铝合金板上,铝合金板通过螺钉安装在减速机下方,永磁体与船舶钢板壁面有一定气隙,采用非接触式吸附方式。
2 Halbach阵列磁场理论分析
Halbach阵列最早是由美国劳伦斯伯克利实验室的Klaus Halbach在利用永磁体结构的磁场做电子加速试验的时候发现的一种特殊的永磁体结构,是将不同磁化方向——径向与切向的永磁体按照一定的顺序排列,使得阵列一侧的磁场显著增强而另一侧的磁场显著减弱,得到工程上较理想的正弦分布磁场[6]。直线型是最基础的Halbach阵列组成形式,图4为直线型Halbach磁场分布图,显示了磁力线的合成效果。
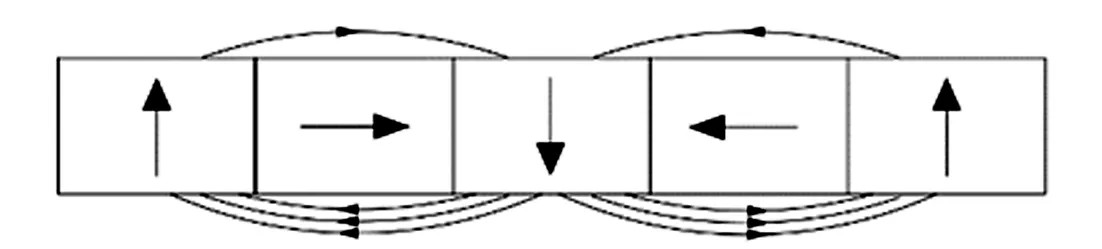
图4 直线型Halbach磁场分布图
圆柱型Halbach阵列可视为将直线型Halbach阵列弯曲首尾相接组合而成的圆柱形状。圆柱型阵列分为内部加强型和外部加强型。图5为外部加强型圆柱Halbach阵列和磁场分布示意图[7]。
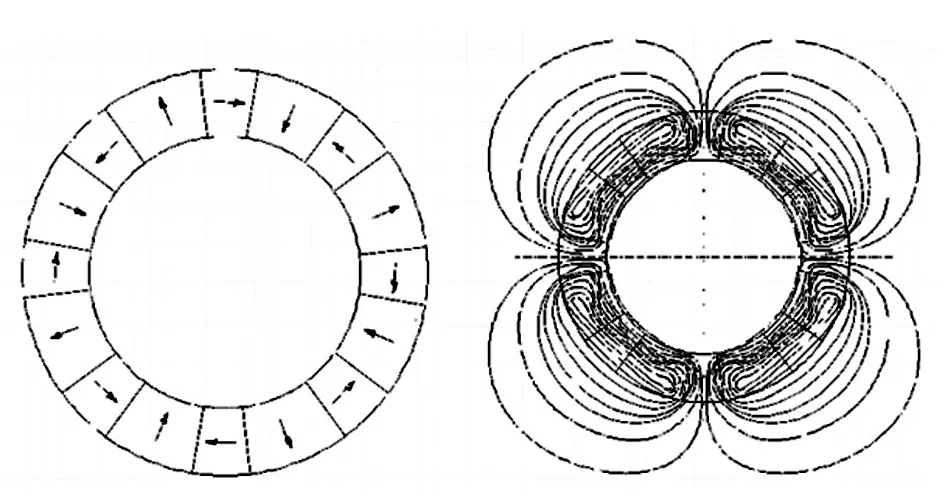
图5 外部加强型圆柱Halbach阵列和磁场分布图
目前,实际使用的永磁体都是用分段磁化的长方体或者立方体永磁体拼接而成的,是近似理想的Halbach阵列,以直线型为例,通过Fourier级数法推导其数学模型[8]。
图6为每波长四段直线型Halbach阵列,设其厚度为d,水平和垂直磁化长度相等且均为d。根据Fourier级数方法,阵列波长λ=l=4d,第n次谐波波数kn=2πn/λ,阵列的磁化强度矢量可由垂直磁化矢量分量(Myn)和水平磁化矢量分量(Mxn)的Fourier级数表示[9]:
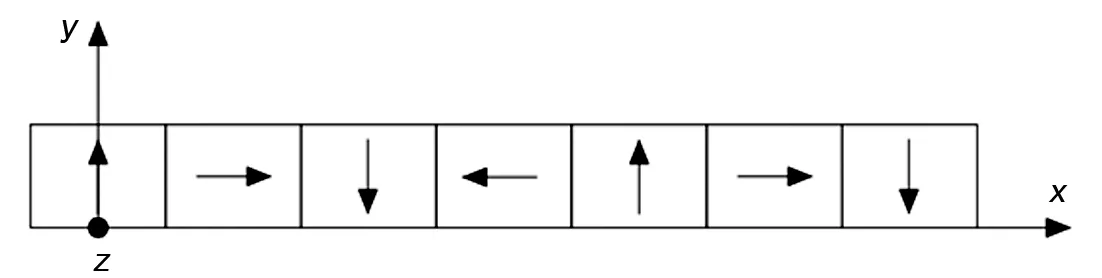
图6 分段直线型Halbach阵列
(1)
式中:Mxn、Myn是以指数函数为基的第n次Fourier级数。
阵列沿着x方向,矢量磁势和磁感应强度分别由下面公式表示:
(2)
(3)
矢量磁势满足标量泊松方程,在笛卡尔直角坐标系的y分量有:
(4)
式中:Mn是磁化矢量M的n次Fourier级数分量。将式(1)代入上式右侧有:
(5)
将式(5)代入式(4)得矢量泊松方程:
(6)
对式(6)两边作Laplace变换,代入磁场边界条件可得在阵列弱磁侧和强磁侧磁势通解的Fourier级数系数Azn1和Azn2分别为:
(7)
(8)
由矢量磁势的定义式B=×A可得强磁侧x与y方向的磁感应强度的Fourier级数的系数为:
(9)
(10)
则阵列弱磁侧和强磁侧在x与y方向的磁感应强度总的Fourier级数为:
(11)
Byn=
(12)
以上为直线型Halbach阵列永磁体磁场的理论分析方程,对于理解圆柱型Halbach阵列也有意义。当然,目前在工程实践中,最常用的是采用有限元法得到磁感应强度、磁场强度、吸附力的数值解。
3 爬壁机器人永磁吸附装置有限元分析
永磁体磁场属于静态磁场,静态磁场有限元分析有二维平面分析和三维实体分析两种方法,三维实体分析虽然运算速度较慢,但是应用范围广,结果更接近真实情况,因此本文采用三维实体分析方法。永磁体外需要一个闭合面,建立一个包含永磁吸附装置和船舶钢板的空气域,空气域的体积至少达到永磁体体积的3倍以上,如图7。
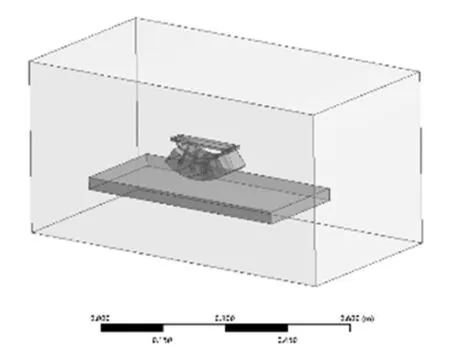
图7 包含永磁吸附装置和船舶钢板的空气域
3.1 确定材料性能参数
永磁吸附装置磁场有限元分析中涉及的材料主要有永磁体、铝合金板、船舶钢板和空气,如图8所示,分别为传统型和Halbach型。传统型极化方向沿厚度方向,且相邻永磁体极化方向相反,Halbach型阵列极化和排列方式如图8。
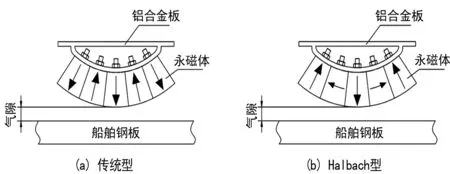
图8 永磁体排布方式
永磁体采用稀土系永磁材料钕铁硼,牌号为N35,外形为扇形,内外半径分别为105 mm和150 mm,夹角15°,主要性能参数如表1所列[10]。

表1 N35钕铁硼主要性能参数
铝合金板除安装永磁体外,还可起隔磁作用,其相对磁导率为1;船舶钢板处于不饱和工作状态,相对磁导率设为3 000;空气相对磁导率设为1。
3.2 仿真分析
永磁体布置受到空间结构限制,几何尺寸的设计受到一定限制,因此主要对不同极化方式(传统型、Halbach型)、气隙和船舶钢板厚度下的磁场进行了有限元分析。由于行走部中的皮带处于永磁体和船舶钢板之间,因此气隙最小值在5~16 mm之间,每间隔1 mm进行仿真;船舶钢板厚度取10 mm、30 mm,对两种厚度下的磁场进行了仿真。
图9为Halbach型、船舶钢板厚度30 mm、气隙15 mm时,永磁体磁场有限元分析图。从图中可以看出,在永磁体和船舶钢板间的气隙处,磁感应强度、磁场强度、吸附力的走向和强弱均符合预期。
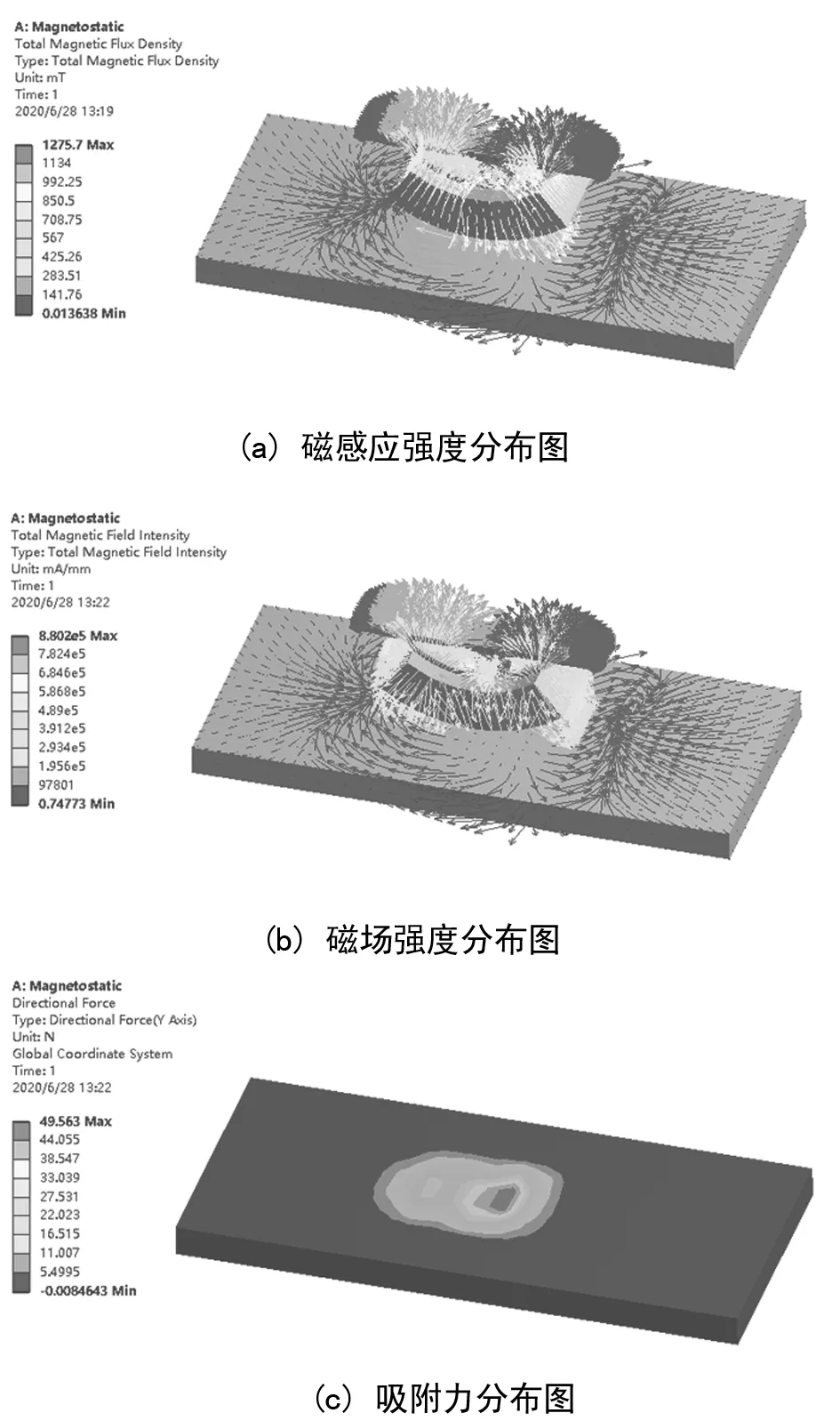
图9 永磁体磁场有限元分析图
图10为船舶钢板厚度分别为30 mm和10 mm时,永磁体吸附力与气隙的关系曲线。Halbach型和传统型永磁体,随着气隙的减小,吸附力都在单调增加;船舶钢板厚度为30 mm,气隙从16 mm减小到5 mm时,Halbach型和传统型的吸附力分别增长了2.27倍和3.02倍,Halbach型和传统型的吸附力比值从2.34回落到1.9;船舶钢板厚度为10 mm,气隙从16 mm减小到5 mm时,Halbach型和传统型的吸附力分别增长了2.38倍和3.42倍,Halbach型和传统型的吸附力比值从2.75回落到1.91.可知,不管是Halbach型还是传统型永磁体,吸附力受气隙影响都很大;在同样参数下,Halbach型相比传统型永磁体,吸附力有明显增长,对提高机器人吸附稳定性有显著意义,当然随着吸附力的增加,机器人驱动力矩也要相应增加,吸附力并非越大越好,需要与驱动力矩等统筹考虑。
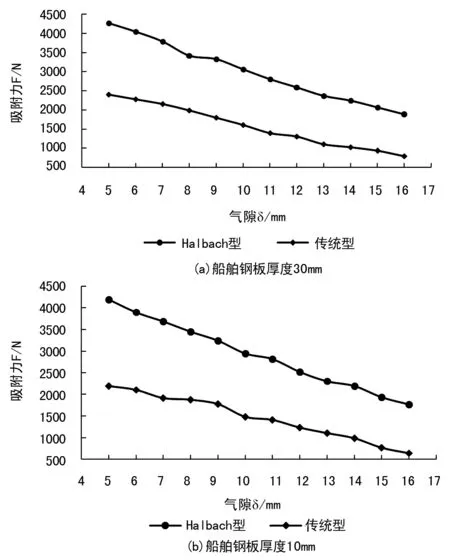
图10 Halbach型与传统型永磁体吸附力曲线
图11为Halbach型永磁体在不同船舶钢板厚度下的吸附力曲线。由图可知,随着船舶钢板厚度从10 mm增加为30 mm,Halbach型永磁体对船舶钢板的吸附力会有所增加,最大增加为原来的1.07倍,增加幅度并不大。因此可知,船舶钢板厚度对Halbach型永磁体吸附力影响相对较小。
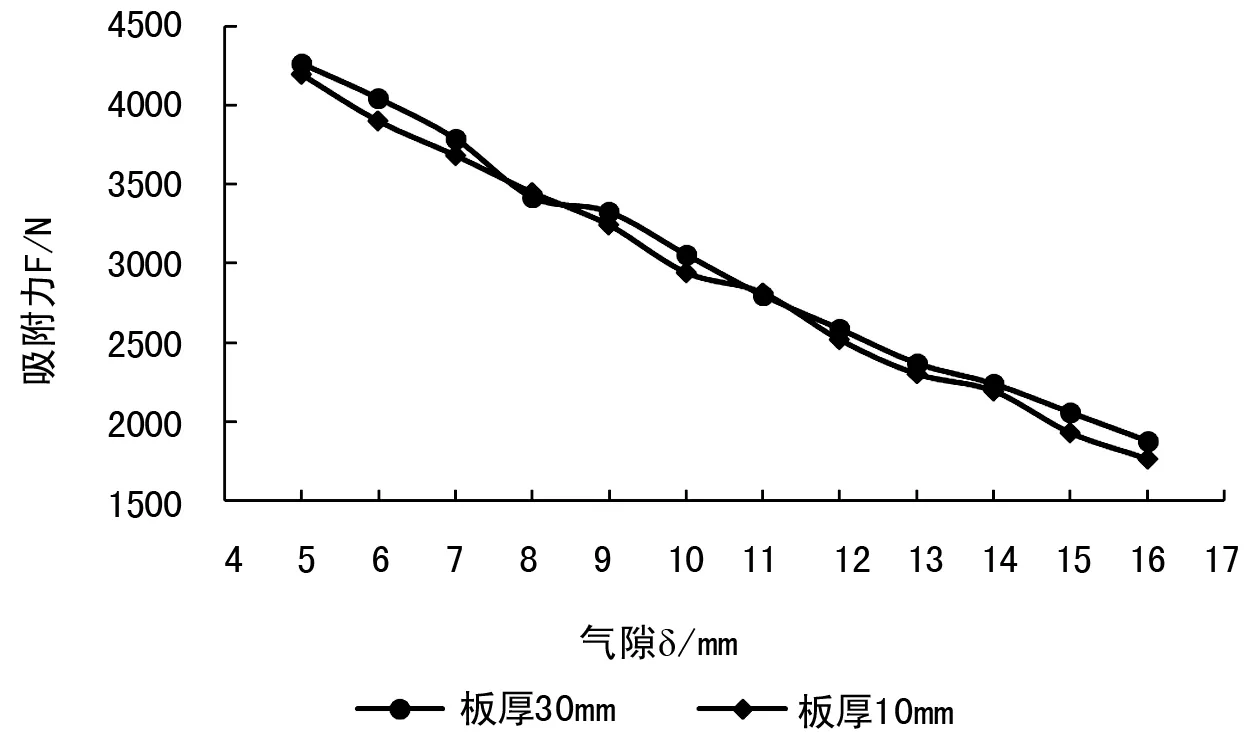
图11 Halbach型永磁体在不同船舶钢板厚度下的吸附力曲线
4 结 论
以船舶除漆爬壁机器人的永磁吸附装置为研究对象,对Halbach型和传统型排布的永磁吸附装置的磁感应强度、磁场强度、吸附力进行了有限元分析,研究了不同排布形式、气隙、船舶钢板厚度等参数与吸附力的关系。研究表明,Halbach型相对传统型吸附力有明显增加;气隙对Halbach型和传统型的吸附力影响很大;船舶钢板厚度对吸附力有一定影响,但相对较小。仿真分析为船舶除漆爬壁机器人的理论计算提供了依据,验证了永磁吸附装置设计的合理性。
猜你喜欢
船海工程(2022年6期)2023-01-02
铁道科学与工程学报(2022年3期)2022-04-13
求知导刊(2022年1期)2022-03-27
大电机技术(2022年1期)2022-03-16
计算机仿真(2022年1期)2022-03-01
微特电机(2020年11期)2020-12-30
仪表技术与传感器(2020年5期)2020-06-11
石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22
社会科学研究(2018年3期)2018-12-21
上海医药(2018年21期)2018-11-21