航行船舶除锈机器人设计方案研究
2020-09-22 13:27张闯徐丹阳郝凯宾潘庆泽袁恽凯
理论与创新 2020年14期
张闯 徐丹阳 郝凯宾 潘庆泽 袁恽凯
【摘 要】随着中国船舶行业的发展,传统除锈的手段已经不能满足船坞的需求。本文提出了一种航行船舶除锈机器人设计方案,针对机械部分与控制部分进行了设计,并通过仿真验证了可行性,以此来供业内人士参考交流。
【关键词】船舶除锈;设计方案;PLC;仿真
引言
目前,随着中国逐渐成为造船中心,我国船舶业蓬勃发展。船舶除锈是船舶维修的重要部分,每年船坞对大量的船舶进行除锈并重新喷涂防锈漆。虽然除锈工艺随着科技的发展,从人工逐渐转变为了机械除锈,但不可避免的是除锈过程将对环境造成污染,并且能耗高、浪费资源。目前如何高效、低污染除锈已经成为了研究的热点。
本文提出一种航行船舶除锈机器人,是一种可以在船舶航行过程中定期除锈的一种装置,以爬壁机器人为载体,通过永磁体及真空吸附的方式紧贴在船舶表面,通过自动导引运输车(AGV)的导航定位系统控制,搭载除锈刮刀实现“即锈即除”以达到最好的除锈效果。
1.概要设计
航行船舶除锈机器人主要是通过进行防水、防锈处理的爬壁机器人搭载除锈装置配合控制系统在船舶航行过程中对船舶定期除锈的装置。需要进行方案设计、力学分析、样机设计、程序设计四大部分。
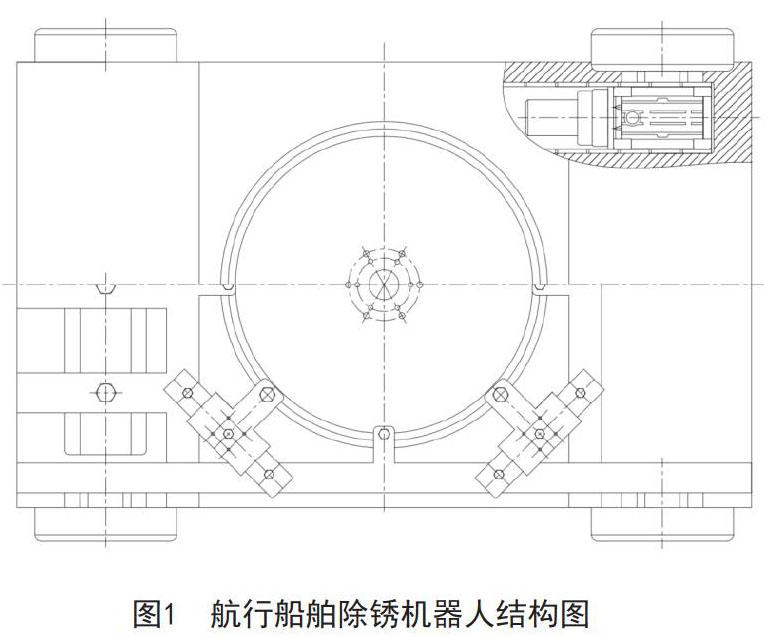
本设计的核心部分为爬壁装置,由内置磁性吸附块的履带覆盖的麦克纳姆轮、真空吸附装置、配合减速装置的交流伺服电机、机架和防水防锈箱体组成,它通过嵌于履带的适当大小永磁体块以及真空负压吸附装置实现在船舶上的吸附,配合着控制系统实现在船舶上的移动。此外还有高效除锈刮刀装置实现航行除锈;AGV导航定位装置以及多传感器融合的监控装置实现对位置、环境以及船舶表面状况的监控;基于C语言的PLC智能控制系统实现电路的设计;基于AR的人机交互控制系统实现对装置的控制。
2.机械部分设计
机器人结构选择了速度快、效率高、越障能力强的轮式机器人,虽然转向能力较差,但使用麦克纳姆轮保证了转向的能力,同时表面嵌有永磁体块的履带,保证了吸附能力。高效除锈刮刀装置选用四个刮刀均布旋转除锈。同时安装了多传感器与摄像头实时监控。
该设计的核心部分是用于搭载其他部件的爬壁装置,不但要考虑到其他装置的装载,并且要考虑工作条件。首先考虑到其与一般的爬壁机器人相比自身受较大重力,故应该具有较强的驱动能力。其次由于其工作环境恶劣,其也还要需要具有的吸附能力。最后要实现对不同需求的航行船舶的除锈,机器人应进行模块化设计,根据不同需求选择性搭载检测部件。
考虑到设备不易过大,设备箱体外形尺寸应小于1000mm×1000 mm×500 mm,同时设备不易过重,质量应小于200kg。由于设备在海水中工作,其首先要保证自身的防锈与防水。海水强腐蚀性和天然电解质,设备箱体必须具有良好的耐腐蚀性,通常海洋开发水下装备常用镍基合金蒙乃尔400(Ni68Cu28Fe),具有良好的耐腐蚀性,同时其密度比铁稍大,可以满足质量的要求。在防水上,防水等级需要达到IPX8,同时考虑到设备的能源问题,选择通过聚氨酯PUR防水电缆进行供电,同时起到防丢失的作用,通过密封胶圈密封,保证设备的防水性。
目前,普通的爬壁机器人一般在10kg左右,普通船舶除锈机器人约80kg左右,考虑到该装置的性能要求以及材料,质量要比以往的爬壁机器人大得多,整体重力约在2000N,选用电机转矩应足够大,保证机器人可以沿着船舶表面正常前进与转弯。同时考虑到船舶航行过程中海浪的冲击,需要具有较大的吸附力保证机器人能在船舶表面40°的倾斜下能够在航行过程中不脱落船体,通过永磁体及真空吸附两种方式结合吸附。
此外高效除锈刮刀装置由伺服电机、减速装置、四个特制的刮刀组成,刮刀独特的可伸缩设计可以满足不同除锈的需求。该部分要保证输出的扭矩足够大,但又不伤及船体,同时转速也不能太慢才能达到除锈的效果,刮刀要保证强度、硬度以及耐腐蚀性。由于该设计为航行中除锈,除锈难度较为简单,该装置可以满足质量Sa2.5级的除锈效果。
3.控制部分设计
在我国智能机电装备的工业设计中,PLC被广泛使用,具有精度高、易操作、成本低等优点,并且可以应用于航行中的恶劣环境。故航行船舶除锈机器人主要采用PLC控制,使用高度集成的PLC硬件用程序代替接线设计,其编程语言简单、技术成熟,可以使用Keil软件编程,并且出现问题时调试方便。
其通过上机位(PC机)与下机位(PLC)通过CAN(Controller Area Network)总线通讯控制,主要有电机驱动模块、电路稳压模块、环境监测模块三大部分。机器人的运动主要通过伺服驱动器控制伺服电机来通过减速装置驱动麦克纳姆轮进行控制,采用四轮独立驱动转向(4WID-4WIS)控制机器人的移动。其除锈工作方式有两种。一是智能除锈,通过安装设备前录入的船舶结构信息通过AGV(Automatic Guided Vehicle)导航技术,结合环境监测模块采集的信息,自行规划轨迹除锈。二是人工控制,通过环境监测模块采集到的各项数据,以及传回的影像通过渲染与虚拟信息相结合,实现增强现实,采用人工的操控的方式进行除锈。
4.三维建模与仿真
UG是一个交互式的CAD/CAM系統软件,广泛用来应用在三维建模、模拟分析等领域,能够毫不费力把复杂的模型建立出来。该设计通过UG建立出样机模型,通过Adams对磁力的仿真数据、计算的电气元件参数,使用UG进行运动学仿真航行中装置的工作状况,对其进行测试,说明所设计的航行除锈爬壁机器人的设计是可行的。
5.结语
本文提出了一种航行船舶除锈机器人的总体设计方案, 给出了其设计方案,并验证了可行性。设计了一种可以在航行过程中除锈的装置,较传统机电设备设计相比融入了新技术的创新。其可以减少资源的消耗与环境污染生产成本较船坞除锈低、适用性强、便于操作,值得技术推广。
参考文献
[1]赵军友,张亚宁,毕晓东,闫成新,董亚飞.喷砂除锈爬壁机器人磁吸附结构优化设计及整机性能试验[J].中国石油大学学报(自然科学版),2020,44(04):94-99.
[2]王岩.洋山四期自动化码头AGV设备控制系统创新研究[J].中国设备工程,2020(12):102-104.
猜你喜欢
学校教育研究(2022年2期)2022-03-22
电子乐园·下旬刊(2021年3期)2021-02-08
ViVi美眉(2020年1期)2020-04-26
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
中学科技(2015年2期)2015-04-28