高速公路低能见度团雾预警与诱导系统开发研究
2020-09-30 07:59曹桂芳
山西交通科技 2020年4期
曹桂芳
(山西省交通科技研发有限公司,山西 太原 030032)
0 引言
团雾比一般的弥漫型大雾更浓,而且能见度更低,在团雾内、外视线差异相当大,正因为团雾在空间分布上的较大差异,使得预测报警比较困难[1]。团雾的出现与局部的小气候环境密不可分,尤其是在低洼地势且空气湿度大的地区。有研究人员发现团雾出现之前,会出现一个“象鼻”振荡曲线,如在限速低能见度范围(即50~200 m),或者在封路低能见度范围(即小于50 m)情况下,团雾出现前会有一个突发的短暂回升过程。这表明随后会出现大密度的团雾。所以如果能在监测过程中捕捉到“象鼻”振荡曲线,就能快速发出预警[2]。
正是因为团雾突降,难以预测,使得高速公路上发生大量的交通事故,比如2017年,在滁新高速公路因为团雾造成30多辆车辆相撞,造成极大的人员伤亡[3-4]。根据公安部交通管理局统计,在2017年全国的高速公路中有2 567处是团雾的频发路段,其中900多处年均出现团雾在10次以上,另外还有130多处的年均团雾出现次数在30次以上,并且在大型交通事故中,近1/3左右都与团雾有关。由于很难预测到“象鼻”振荡规律,所以不能对通过车辆进行提前警示,尤其是车辆就地停车时,容易发生追尾,对安全行车危害极大。因此,研究低能见度团雾情况下的高速公路预警与积极诱导系统,对出行安全具有非常重要的意义[5]。
1 团雾提前预测、预警系统的研究
1.1 团雾提前预测、预警系统组成
考虑到高速公路沿线的路况条件很难达到建立标准气象观测站对环境的要求水平,而且一条高速公路历经各地的地理环境与观测要素也不尽相同,因此在设计高速公路团雾预测、预警系统所采用的模块结构需要灵活保障其扩展功能,以适应不同路段下的团雾预警情况。
本系统根据高速公路沿线的不同地理环境和团雾频发地段的实际情况,在高速公路沿线间隔20~30 m设置一定的智能区域控制系统和诱导单元(智能诱导灯),采集路段中的气象要素并实测其能见度值,将采集的数据与高速公路沿线各个地方监测站监测的历史团雾气象要素演变与能见度值相结合比较,推算出此刻团雾的特征和变化规律,由此建立高速公路团雾的监测和预警系统。
本系统的预警核心为区域控制系统,其包括:能见度检测、数据预处理、无线网关、太阳能供电、共享数据库系统、数据处理系统等,其中数据处理系统包括了低能见度浓雾分级预警系统与邻近预报系统。将采集到的各类环境气象要素监测数据通过GPRS实时传送到远程上位机软件(即道路远程监控中心),通过开发的团雾预警算法对数据加工转换和分析,利用分析结果作出评估,以判断对车辆给出相应的预警结果。目前,该系统已经在闻垣高速公路某团雾多发地段进入试验应用期。
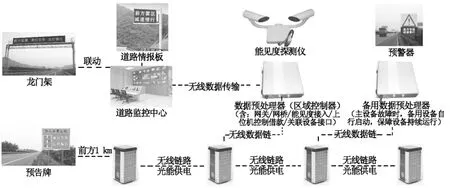
图1 高速公路团雾提前预测、预警系统组成
1.2 团雾预测、预警的算法流程
本预警系统需要借助气象部门现有的高空情况、地面情况、数值预报三大监测系统历史数据,结合团雾多发地的沿线局地监测站的实时气象监测数据,建立气象数据专项数据库,利用大数据综合诊断分析,对实时监测数据和历史监测数据进行对比、关联、分析,建立一套可靠的团雾预测系统,同时将低能见度的预警信息和监测数据及时发送至高速公路远程监控中心,为高速公路决策管理系统提供数据支撑,实现交通部门与相关部门信息系统之间的实时信息交换和共享。此外,本系统还能根据用户的实际使用情况和监测结果来反向验证预警信息指标和临近预报技术指标的准确性,并不断完善与优化预报流程。
本系统的工作流程如图2所示,在团雾预警系统采集数据的过程中,系统将动态跟踪气象信息,同时调出气象台监测资料、卫星遥感资料、周边监测站资料、公路监测资料、历史档案等,实时综合分析,当预报数据达到成雾条件时,路面能见度小于500 m,系统自动向高速公路指挥中心发布团雾预警,预警内容包括发生的时间、地段和趋势,并动态跟踪、启动各监测点声光警报信号。在获取到气象能见度后根据风险评估判定算法,评估车辆是否处于团雾的风险之中,并对评定结果进行语音提示。如果在预报时段团雾减弱消散,则及时发布订正与团雾消散预报。
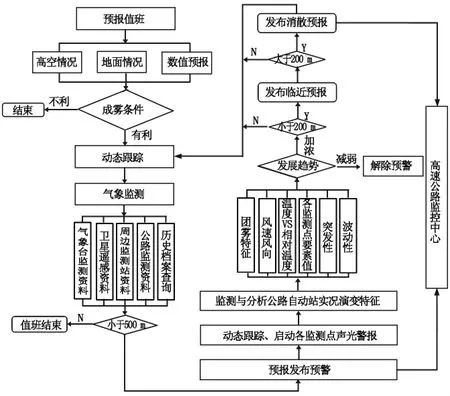
图2 团雾预警系统算法流程图
1.3 团雾预警风险评估
高速公路上的团雾使得能见度低,会极大地增加路上行车风险,因此,需要对团雾情况下的车辆行驶发生事故的概率和状态进行风险评估。评估方法如下。
针对高速公路上团雾情况下的行车事故发生的概率,建立风险判定函数:

式中:CI为行车安全指标;a0,a1,a2,…,am为判定函数的系数向量;x1,x2,…,xm为解释变量参数。
考虑到条件Logistic回归模型能较好地表征在消除干扰因素下保证结果的可靠性,因此能够用来判定事件是否发生,所以可以利用该模型来分析团雾情况下行车事件发生与否。条件Logistic回归模型的表示如式(2):

结合式(1)与式(2)可以得到在团雾情况下发生风险的概率。
2 实测结果分析
本系统设计完成后安装于实际高速公路中,通过监测高速公路在团雾环境下的行驶情况,各安装路段在一年内统计的同比事故减少比率,如图3所示。
从图3中可以看出,在安装了本系统后,通过对团雾条件下行车风险的评估与预警,团雾高发路段的事故发生率有极大降低,并且本系统还能在预警的前提下对车辆起到很好的行车诱导作用,提高了低能见度团雾情况下的行车安全。
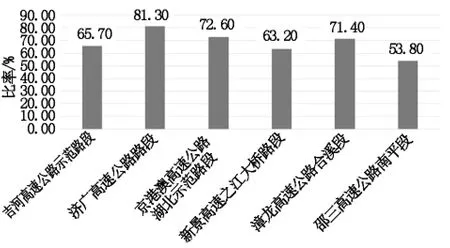
图3 实际高速公路示范路段同比事故率减少比率
3 总结
本文研究了在高速公路低能见度团雾条件下的行车风险评估预警与诱导系统,建立了团雾预测预警模型,结合团雾行车风险评估模型获得高速公路团雾情况下发生行车风险的概率,本系统设计完成后成功应用于多条高速公路路段,监测结果显示本系统的应用使得各示范路段同比事故率极大减少,提高了低能见度团雾条件下高速公路的行车安全。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
中国交通信息化(2022年7期)2022-10-27
气象水文海洋仪器(2021年4期)2021-12-11
北京交通大学学报(2021年4期)2021-09-26
天津科技(2021年4期)2021-05-13
民用飞机设计与研究(2020年4期)2021-01-21
建材发展导向(2019年11期)2019-08-24
电子制作(2019年11期)2019-07-04
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18