
三节臂挖掘机工作装置的建模与运动学仿真
2020-10-20 02:16
矿山机械 2020年10期
太原科技大学机械工程学院 山西太原 030024
目前,在挖掘机包络图绘制的方面,大多采用虚拟样机技术、MATLAB 编制程序和 SimMechanics 等方法。虚拟样机可以提供良好的视觉感,但是建模过程复杂,MATLAB 编程得不到运动的过程,因而笔者采用 Robotic Toolbox 工具箱进行运动学仿真。
1 三节臂挖掘机的结构与运动学分析
1.1 三节臂挖掘机的结构

图1 三节臂挖掘机工作装置坐标系Fig.1 Coordinate system of working device of three-arm excavator
图1 所示为三节臂挖掘装置的运动学模型,主要由回转装置、上动臂、下动臂、斗杆、铲斗及其相应的液压缸组成。三节臂挖掘机坐标系的建立原则如下,在挖掘机的底座回转中心点与地面的之间建立坐标系Ox0y0z0,在下动臂和回转平台的铰接处建立坐标系O1x1y1z1,在上动臂和下动臂的铰接处建立坐标系O2x2y2z2,在斗杆和上动臂的铰接处建立坐标系O3x3y3z3,在斗杆和铲斗的铰接处建立坐标系O4x4y4z4,在铲斗斗齿尖建立坐标系O5x5y5z5。
忽略工作装置的外形和尺寸,将挖掘机的上动臂、下动臂、斗杆和铲斗简化为图 2 所示,基于机器人学的 D-H 法建立挖掘机工作装置运动坐标系。工作装置 D-H 参数如表 1 所列。

图2 三节臂挖掘机各连杆 D-H 坐标系Fig.2 D-H coordinate system of various links of three-arm excavator
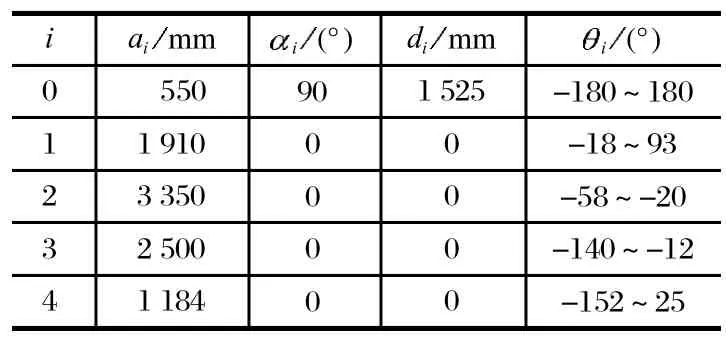
表1 工作装置 D-H 参数表Tab.1 D-H parameters of working device
其中:ai为zi-1到zi沿xi平移的距离;di为xi-1到xi沿zi-1平移的距离;为zi-1到zi绕xi旋转过的角度;为xi-1到xi绕zi-1旋转过的角度。
1.2 三节臂挖掘机的运动学分析
三节臂挖掘机的运动学分析是研究铲斗齿尖末端位姿与关节角之间的关系,分为正运动学与逆运动学。相邻连杆i-1 和i连杆的位姿关系可以通过相邻连杆坐标系之间的齐次坐标变换矩阵表示[3]。此关系式为

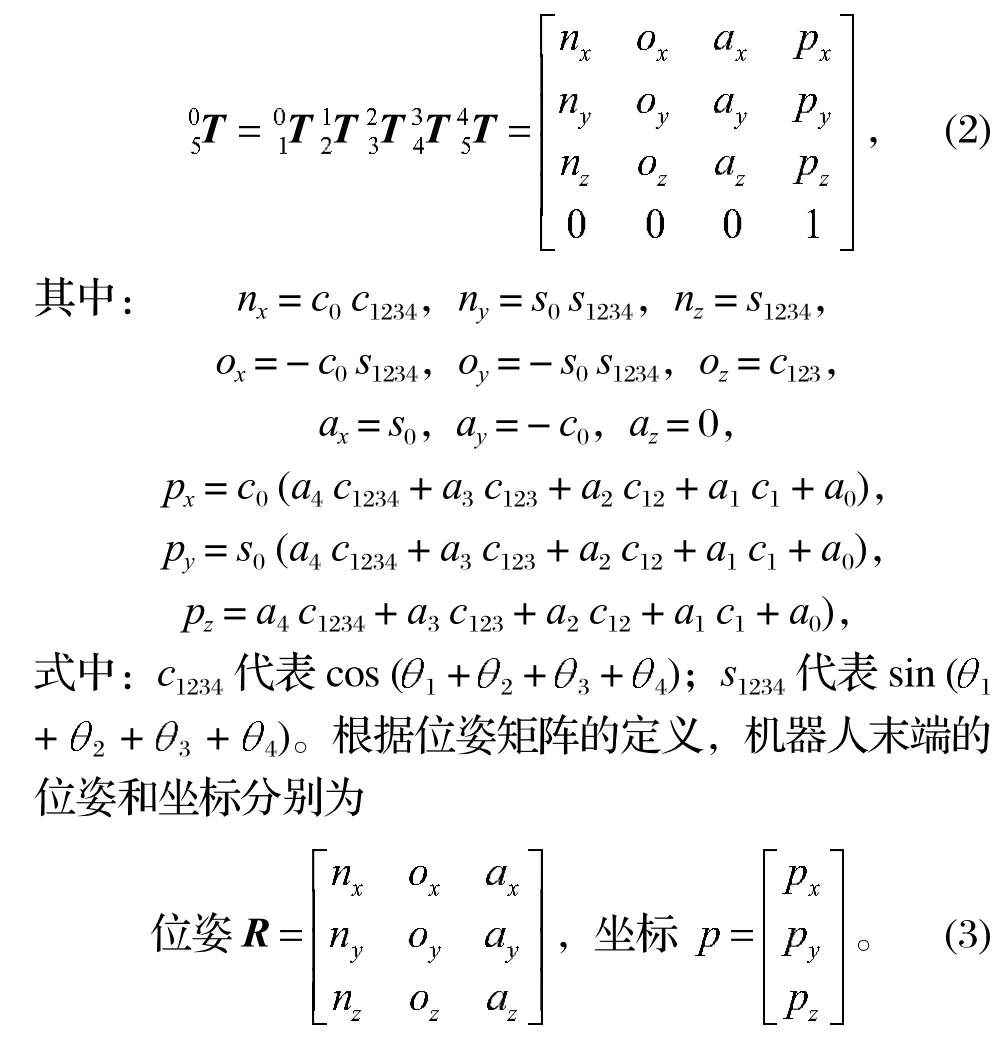
由式 (2) 可知,正向运动学分析公式明确,计算简单。但逆向运动学分析随着机器人自由度的增加会出现多组逆解的情况,需要根据特定情况选择最优解[4]。
2 三节臂挖掘机运动学仿真
2.1 挖掘机的建模
三节臂挖掘机的工作装置为五自由度的连杆组成,各个连杆之间通过旋转关节进行连接,利用Robotic Toolbox 工具箱的 Link 和 SerialLink 函数进行工作装置的建模。对于其中的 SerialLink 函数作简单介绍:plot 表示以图形绘制机器人,teach 表示驱动机器人[5]。
茶染艺术的染色方法主要分为直接染色法、同浴媒染法和后媒染色法[8]。其中采用直接染色法可染棕色,采用绿矾同浴媒染法可得皂色,分别用绿矾、铁浆后媒染色法可得莲子褐色和砖褐色。虽然茶叶分为了绿、黄、黑、红、青和白六种,但是每一种下又有多样的品种,不同的品种,其茶色都会有微妙的差别。甚至同一品种下,不同的制作工艺都会造成不同的茶色。除此之外,染色的手法、环境、时间、温度均是影响茶染效果的因素。所以,经过茶染出的成品总是带有独一无二的特性。
根据表 1 的 D-H 参数值,按照 L(i)=Link ([a,alpha,d,theta,'standard']) 中参数的顺序进行,调用Robotic Toolbox 工具箱的 plot 和 SerialLink 函数建立三节臂挖掘机工作装置的程序如下,建立挖掘机工作装置运动调节界面和结构简图。
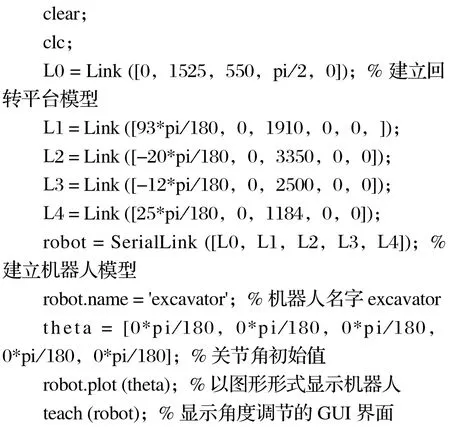
使用 MATLAB 运行上述代码后,显示效果如图3 所示。

图3 运动调节界面的工作装置模型Fig.3 Model of working device of motion control interface
在图 3 中,左半部分是 teach 产生的手动调节界面,通过手动 q1~q5 的滑动条可以改变机器人末端姿态,也就是改变斗尖的运动[6];右端是建立的三节臂工作装置的简化模型,当拖动左边滑动条时,末端的位置变化可通过左上方x、y和z显示。
2.2 三节臂挖掘机的作业范围
挖掘机的作业范围通常用挖掘包络图来反映,该图指的是斗齿尖所能达到的最远位置所形成的封闭图形[7]。三节臂挖掘机的运动是通过液压缸来驱动各个部件的运动,最终反映在铲斗齿尖的运动,实现斗齿尖理论达到的范围,液压缸的主要参数如表 2 所列。

表2 液压缸的主要参数Tab.2 Main parameters of hydraulic cylinder

图4 三节臂挖掘机空间挖掘包络图Fig.4 Spatial excavation envelope diagram of three-arm excavator

图5 三节臂铲斗齿尖位移曲线Fig.5 Displacement curve of tooth tip of bucket of three-arm excavator
在前者的研究基础之上,充分考虑动臂与转台的铰接点之间的距离以及回转中心距离地面的高度,能使仿真更加接近真实情况,绘制出的包络图 (见图 4)的误差更小,同时记录包络图绘制过程中末端在平面2 个方向的位移 (见图 5)。
三节臂挖掘机的 3 个主要作业尺寸为最大挖掘高度、最大挖掘半径和最大挖掘深度,将 3 个主要尺寸与样本值进行对比分析,结果如表 3 所列,从而验证Robotic Toolbox 运动学仿真的可行性。

表3 三节臂挖掘机主要作业参数对比Tab.3 Comparison of three-arm excavators in main operation parameters
2.3 同机型挖掘机分析
在不考虑回转的作用下,为了便于更加直观地观察,将图 4 的包络图反映到二维坐标系xz中,得到三节臂挖掘机包络图的投影如图 6 所示[8]。
普通动臂也利用 Robotic Toolbox 运动学仿真得到包络图,并选择 3 个特殊的工作尺寸——最大挖掘高度、最大挖掘半径、最大挖掘深度与实际值进行对比分析,结果如表 4 所列。

图6 三节臂挖掘机挖掘包络图的投影Fig.6 Projection of excavation envelope of three-arm excavator
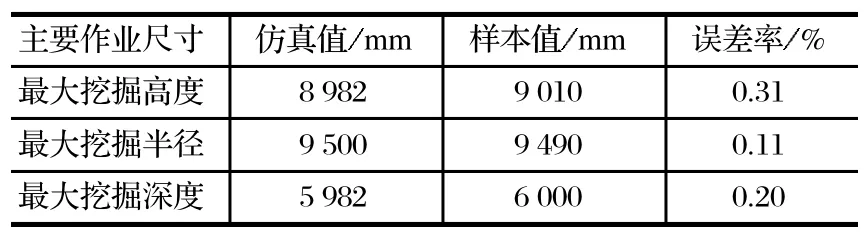
表4 普通挖掘机作业参数对比Tab.4 Comparison with ordinary excavator in operation parameters
由表 3、4 可知,不论是普通挖掘机还是三节臂挖掘机,其包络图误差值都在允许的范围,验证了此方法的可行性。为了更一步分析三节臂挖掘机和普通挖掘机工作范围的区别,以同机型的三节臂和普通臂的挖掘机作为研究对象,分析二者的区别,结果如图7 所示。
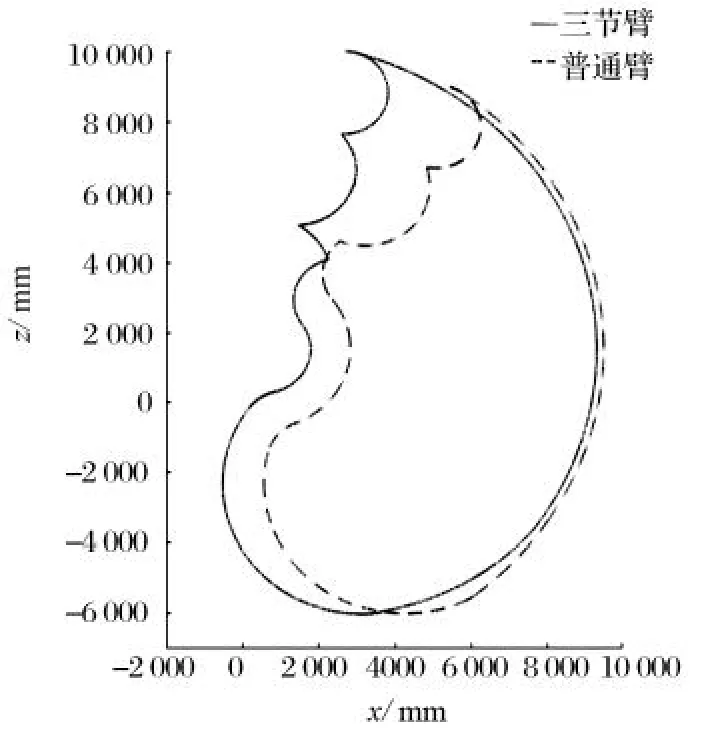
图7 同机型挖掘机挖掘包络投影的对比Fig.7 Comparison of same-model excavator in excavation envelope projection
由上述数据可知,三节臂挖掘机的最大挖掘机高度大于普通挖掘机,最大挖掘深度略微大于普通挖掘机,而普通挖掘机的最大挖掘半径与三节臂挖掘机几乎相同,三节臂挖掘机相对于普通挖掘机在最大挖掘高度方面显著处于优势,这与数据样本值是相符的。
3 运动轨迹规划仿真
在工作装置进行运动学分析的基础上,对工作装置进行轨迹规划。三节臂挖掘机的轨迹规划是依照特定的作业任务要求,设计起始点和目标点之间关节的运动轨迹以及各关节角度变化趋势[9]。轨迹规划主要包括 2 种方法:点到点规划 PTP (point to point)、连续路径规划 CP (continuous path motion)。
3.1 关节轨迹规划
笔者采用 jtraj 函数来实现挖掘机各关节连续路径规划仿真 (见图 8),jtraj 的调用格式为

式中:Q 为Q0到Q1的关节空间轨迹规划;QD为Q0到Q1的关节角速度轨迹规划;QDD为Q0到Q1的关节角加速度轨迹规划;T为给定的时间向量长度。
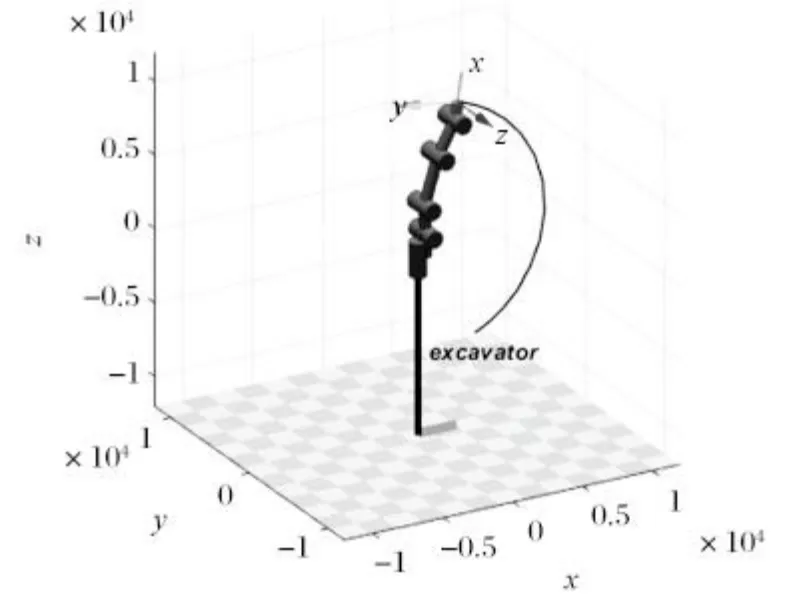
图8 关节空间轨迹规划Fig.8 Spatial trajectory planning of joint
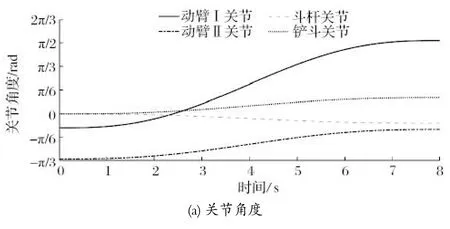
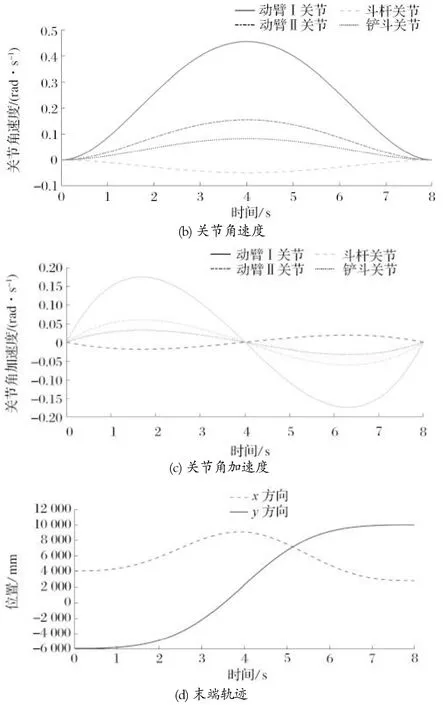
图9 关节的空间角度、角速度、角加速度以及末端轨迹曲线Fig.9 Curve of spatial angle,angular velocity,angle acceleration and tip trajectory
3.2 避障轨迹规划
挖掘机在工作时可能在运动过程中遇到障碍,这是时常发生的情况,根据这种情况设计避障轨迹规划路线 (见图 10),其基本过程是挖掘机在挖掘物料提升和回转卸料,在回转卸料的过程中出现障碍,此时挖掘机需要进行液压缸调整从而避开障碍,达到预期位置的目的。
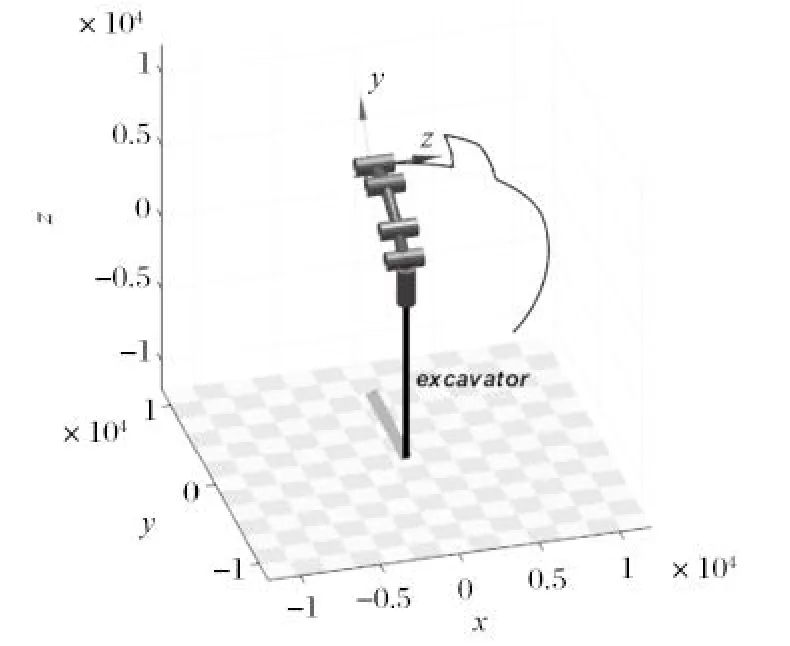
图10 避障轨迹规划Fig.10 Trajectory planning of obstacle avoidance
4 结论
(1) 研究了某三节臂挖掘机工作装置,用 D-H 法建立工作装置各关节坐标模型,建立五自由度挖掘机的模型,得到挖掘机末端姿态的数学方程,通过Robotic Toolbox 进行仿真验证方程的正确性。
(2) 在 Robotic Toolbox 环境下对三节臂挖掘机的工作装置进行仿真,通过模型的运动学仿真得到包络图,在绘制包络图过程中可以看出各部件之间的相对运动,仿真结果在允许的范围内,提供了包络图绘制简单可靠的方法;采用 Robotic Toolbox 绘制同机型的三节臂与普通臂挖掘机的包络图,结果表明三节臂挖掘机的挖掘范围明显大于两节臂。
(3) 在轨迹规划过程中,挖掘机各个关节的角度与时间关系运动过程连续平滑,各关节的角速度和角加速度都是光滑变化的,没有出现跳变点,进一步在首末两点的速度以及加速度都可以有效地约束为零。由此可知,工作装置在进行实际作业时,各关节、运动部件可以平稳地运行,并且可以达到预期的位置。
猜你喜欢
学生天地(2020年16期)2020-08-25
电子制作(2019年15期)2019-08-27
汽车实用技术(2017年16期)2017-09-21
冰雪运动(2016年5期)2016-04-16
海军航空大学学报(2015年1期)2015-11-11
有色金属设计(2015年2期)2015-02-28
筑路机械与施工机械化(2014年10期)2014-03-01
筑路机械与施工机械化(2014年8期)2014-03-01
筑路机械与施工机械化(2014年8期)2014-03-01
汽车实用技术(2014年9期)2014-02-20
