
基于EtherCAT总线的推板式造波机控制系统
2020-10-20 05:55陈俊邢方亮王磊王天奕徐奕蒙郭泽斌丘瑾炜
科技资讯 2020年23期
陈俊 邢方亮 王磊 王天奕 徐奕蒙 郭泽斌 丘瑾炜
摘 要:该文构建了基于EtherCAT总线的推板式造波机控制系统总体结构,并详细论述了该系统的硬件结构和软件流程。该系统由1台中央控制主机、1台运动控制器和48套执行机构组成。中央控制主机和运动控制器之间的数据传输是基于CSocket类开发的网络通信软件实现,而控制命令的传输是基于ADS通信来实现。通过TwinCAT的电子凸轮耦合技术,同时借助虚拟轴的概念,实现48台推波板的高精度同步。
关键词:EtherCAT TwinCAT 推板式造波机 ADS 凸轮耦合
中图分类号:TH166 文献标识码:A 文章编号:1672-3791(2020)08(b)-0018-04
Control System of Push-plate Wavemaker Based on EtherCAT Bus
CHEN Jun* XING Fangliang WANG Lei WANG Tianyi XU Yimeng GUO Zebin QIU Jinwei
(The Pearl River Hydraulic Research Institute, Guangzhou, Guangdong Province, 510611 China)
Abstract: In this paper, the overall structure of the control system of push-plate WaveMaker based on EtherCAT bus is built, and the hardware structure and software flow of the system are discussed in detail. The system consists of a central control host, a motion controller and 48 sets of actuators. The data transmission between the central control host and the motion controller is realized by network communication software developed based on CSocket, while the transmission of control command is realized based on ADS communication. Through the electronic CAM coupling technology of TwinCAT and the concept of virtual axis, 48 push wave plates are synchronized with high precision.
Key Words: EtherCAT; TwinCAT; Push-plate wavemaker; ADS; Cam coupling
造波机是与波浪试验水池或水槽紧密相关的一种专用科研设备,通过它在试验水池或水槽中造出不同周期和不同波高的波浪,从而尽可能地模拟真实的海洋状况,并为各种海洋试验、港口及河口试验等研究提供准确可靠的科学依据[1]。目前国内大多数的造波机系统采用的是伺服电机+推波板结构,其工作原理是通过伺服电机的转动带动推波板的前后往复的机械运动对水体施加振动产生波浪。由于实际海洋中的波浪运动是连续、光滑、多变的,因此推波板的机械运动也要满足这一特点,这需要伺服电机具有强大的快速响应能力以及较高的位置和速度跟踪精度[2]。该系统采用伺服电机驱動方式,选择遵循高性能EtherCAT总线协议的倍福运动控制器,同时借助TwinCAT 2灵活强大的运动控制处理能力,因此造波控制性能好、伺服响应速度快、安装调试易操作和无环境污染等是该控制系统的4个主要优点[2]。
1 控制系统结构
基于EtherCAT总线的推板式造波机控制系统总体结构由中央控制主机、运动控制器和执行机构3个部分组成(见图1)。
中央控制主机是整个造波机系统的控制中枢。主要完成各种类型波浪运动轨迹数据的生成、控制指令的发送、波高采集、图形显示和数据处理等任务。
运动控制器集成基于EtherCAT总线的运动控制卡,并安装TwinCAT 2 PLC程序,接收中央控制主机传来的造波数据文件和控制指令,将造波文件中每台推波板的位置数据转换为脉冲和方向数据,发送给对应的驱动器,控制伺服电机做正反向运动。
执行机构由伺服驱动器、伺服电机、滚珠丝杠和推波板4个部分组成。执行机构是整个造波机的运动单元,控制系统通过运动控制器发送控制命令给伺服驱动器,伺服驱动器接收到指令后驱动电机做正反向转动。由于伺服电机的轴承通过联轴器与滚珠丝杠连接,而推波板是通过滑台挂接在滚珠丝杠上,因此,推波板便在滚珠丝杠上随着伺服电机的转动而做规律性的前后往复的直线运动,进而推动水体产生波浪。
2 高性能运动控制总线EtherCAT
EtherCAT是一个开放架构,以以太网为基础的现场总线系统,EtherCAT是确定性的工业以太网,是德国Beckhoff(倍福)公司在2003年提出[3]。EtherCAT工业以太网具有通信速率高、实时性能好、同步性能精准、拓扑机制多样化等优点,其产生后迅速在工业领域兴起应用热潮[4]。尤其在运动控制领域,EtherCAT的作用是保证运动控制器和各驱动器之间指令数据和状态数据以微秒为单位的同步通信,以达到多轴实时同步运动控制目的[5]。
EtherCAT的工作原理如图2所示。EtherCAT网络结构一般采用“一主多从”方式,即一个主站节点+多个从站节点[4]。EtherCAT网络的一个完整通信周期数据由下行数据帧和上行数据帧组成,上行数据帧由主站周期性的下发给从站,从站将下行数据帧处理后作为上行数据帧发给主站。具体工作流程是:主站将下行数据帧发给1#从站,1#从站获得帧数据后进行相应的读写操作,然后将处理后的帧数据发给2#从站,同样的,2#从站获得帧数据后也进行相应的读写操作,然后将处理后的帧数据发给3#从站,按照该传递流程,(N-1)#从站获得帧数据后进行相应的读写操作,然后将处理后的帧数据发给N#从站,也就是网络的最后一个节点,N#从站获得帧数据后依然进行相应的读写操作,到此,所有从站节点都对主站发来的数据帧进行了读写操作,此时N#从站将新的数据帧,即上行数据帧,反向并依次经过所有从站发回给主站,结束一个周期的通信。
一种实时工业以太网能否成功运用到运动控制系统中,其中需要考虑的一个十分重要的指标便是时钟同步的精度。EtherCAT采用特殊的分布时钟同步机制对系统内各伺服轴进行时钟同步,该时钟同步机制是基于标准精密时钟同步协议IEEE1588标准[6]。EtherCAT采用分布时钟的同步机制,使其同步精度(<100ns)远高于其他同类型网络(例如CAN、SynqNet等)。对于分布式100轴伺服电机可在100μs内完成各轴命令数据和状态数据的发送与读取,分布时钟同步技术使各轴的时钟偏差远小于1ms[6]。
3 控制系统结构设计
3.1 硬件系统结构设计
如图3所示,整个系统由1台中央控制主机、1台运动控制器和48套执行机构组成。中央控制主机选用工业控制计算机,安装Windows 7 64位操作系统,中央控制主机与运动控制器之间通过以太网相连。运动控制器选用Beckoff工控机,运行Windows 7 32位操作系统,安装TwinCAT 2运动控制软件。该控制器配备2个通信网口,一个与中央控制主机相连,执行以太网协议,另外一个与伺服驱动器相连,执行EtherCAT协议。采用VS2010高级语言中的MFC模块中的CSocket通信类开发了中央控制主机与运动控制器之间的通信软件,完成二者之间的波浪数据传输与控制指令执行任务。
伺服驱动器选用德国LTI公司3轴驱动器,即1台驱动器可带3台伺服电机。运动控制器与16台伺服驱动器之间通过EtherCAT网络相连,组成一个单链路总线结构,即运动控制器EtherCAT接口的输出端接入1#驱动器EtherCAT接口的输入端,1#驱动器EtherCAT接口的输出端接入2#驱动器EtherCAT接口的输入端,依此类推,直到15#驱动器EtherCAT接口的输出端接入16#驱动器EtherCAT接口的输入端为止。
该系统采用推板式造波机,其原理如图4所示。造波时,控制系统通过驱动电机带动位于水体中的推波板沿直线方向做前后往复运动,从而带动池中水体产生向前的波浪运动,波高与推波板行程和速度成正比,波长与推波板往复的频率成反比[1]。推板式造波机使用的导轨元件和滚珠丝杠等尺寸较大而且整体结构复杂适用于浅水池造波。
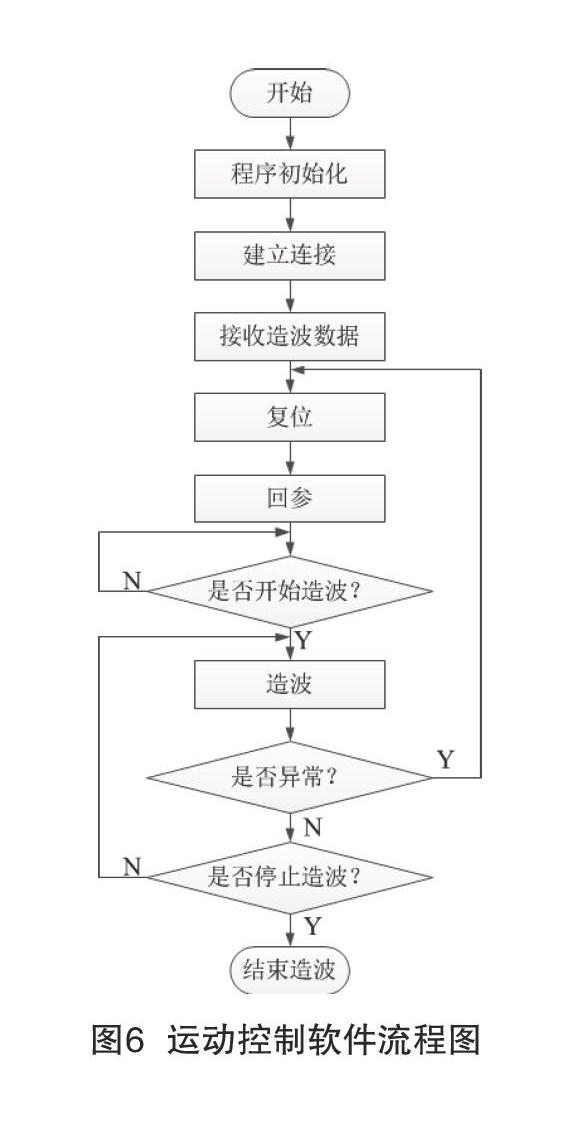
3.2 软件系统结构设计
系统软件分为两个部分:中央控制主机软件和运动控制软件。中央控制主机软件是基于Windows 7 64位系统,采用VC++ 2010平台开发;运动控制软件是基于Windows 7 32位系统,采用TwinCAT 2平台开发;二者之间通过ADS通信进行数据交换。
中央控制主机软件流程如图5所示。
4 控制系统难点及解决方案
在该造波控制系统中,较为复杂的问题是波浪实时数据的生成和传输以及48个伺服轴的高精度同步运动。
在该系统中,中央控制主机软件根据输入的造波参数生成波列数据,然后发送给运动控制软件,后者将它以文本格式(.txt)存在计算机中。造波前运动控制软件在TwinCAT 2 PLC 中从这个文件装载数据。为解决TwinCAT与伺服驱动器之间快速、大量的数据交换,该系统采用了实时以太网EtherCAT技术。
轴的同步是指该运动控制器所带的48个伺服轴之间的同步运动。该系统采用TwinCAT 2的电子凸轮耦合技术,同时借助虚拟轴的概念来解决同这48个伺服轴之间的高精度同步问题[7]。电子凸轮技术是相对于机械凸轮被提出的,可替代机械凸轮实现功能相同的凸轮轴和虚拟主轴之间的同步运动。在该系统中增加一个虚拟轴作为主轴,48个物理轴作为从轴,主轴位置坐标按照0.02mm间隔增加,运动速度设置为恒定值1mm/s,这样相邻两个位置点间的运动时间是0.02s(造波运动一般运动间隔为0.02s),48个从轴与主轴之间做凸轮耦合,那么从轴会随着主轴运动而同步运动。
5 试验
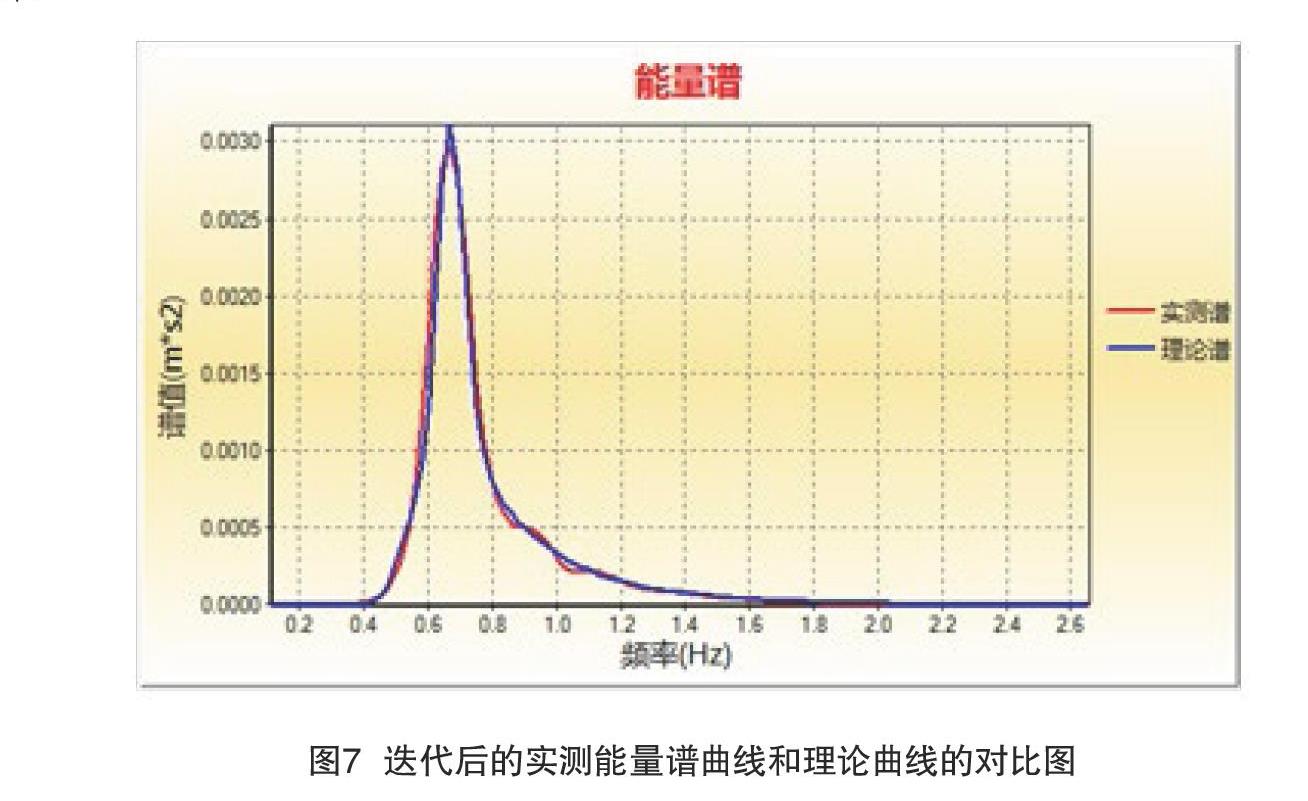
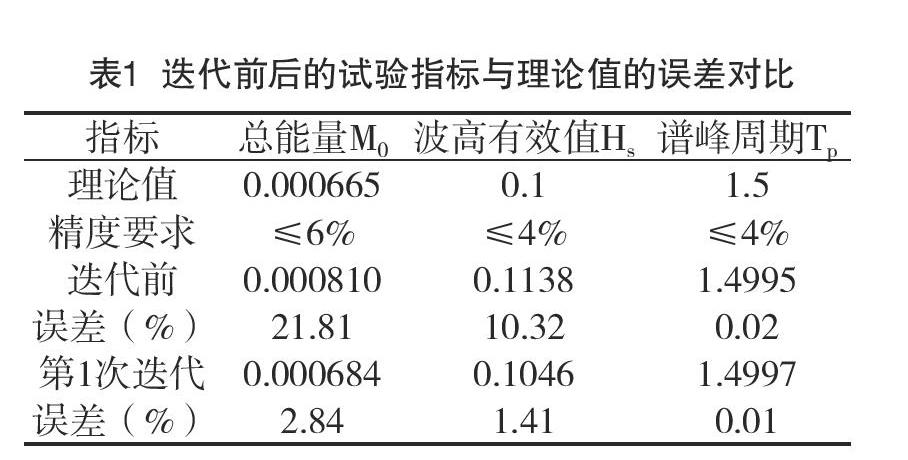
试验选取基本参数为J谱,波高0.1m,谱峰周期1.5s,水深0.74m的单向不规則波为试验对象。通过对实时采集的波高数据进行统计分析,可发现,只需经过1次迭代,试验指标总能量M0,波高有效值Hs和谱峰周期Tp都满足条件。迭代前和迭代后的试验指标与理论值的误差对比见表1所示,迭代后的实测能量谱曲线和理论曲线的对比如图7所示,从图7中可发现,二者几乎重合,说明迭代后的波列数据可满足试验条件。
对不同类型波,在不同周期、波高、水深等条件下进行了多组造波试验。试验结果表明,该造波机系统的设计、制造能够满足造波要求,工作稳定、可靠,造波性能测试反应出该设备性能达到相关技术设计标准及规范要求,可以进行正向、斜向和多向不规则波等各种科学研究的波浪试验。
6 结语
该系统将高性能的EtherCAT网络和先进的运动控制技术TwinCAT应用到造波机系统中,成功开发了基于EtherCAT总线的推板式造波机控制系统。通过这两项技术的应用,大大提高了造波机系统的各项性能,而且系统采用TwinCAT的电子凸轮耦合技术并借助虚拟轴的概念,显著提高了系统各伺服轴之间的同步精度。同时,得益于Beckhoff强大的运动控制器处理能力,使得系统结构简单,安装调试方便,节省了成本,且便于后期维护,在一定程度上提高了系统的稳定性和可靠性。并通过大量试验,验证了该系统对科学研究海洋和科学开发利用海洋的深入研究具有十分重要的工程意义。
参考文献
[1] 陈俊,王磊,王天奕,等.总线式多轴运动控制系统在造波机中的应用[J].科技资讯,2017,15(29):133-134.
[2] 苏印红,张爱军,孙琳,等.基于EtherCAT的多轴伺服系统设计研究[J].电子设计工程,2019,27(14):40-44.
[3] 丁可.基于EtherCAT的多控制器同步的造波机控制系统设计[D].大连理工大学,2018.
[4] 王丁一,程少科,陈俊华,等.基于倍福TwinCAT的摇板式造波控制系统设计[J].机械工程师,2016(12):37-39.
[5] 张忆.大波高电动推板式造波机高精度控制算法研究[D].中国舰船研究院,2018.
[6] 聂俊杰,徐东亮,王龙飞,等.基于EtherCAT 网络的伺服造波控制系统[J].组合机床与自动化加工技术,2016(5):91-93.
[7] 龚文科.基于EtherCAT总线的多轴伺服驱动系统设计[D].杭州电子科技大学,2019.
