
Delta并联机器人本体尺寸及结构参数优化设计研究
2020-10-28 01:35张萌
河南科技 2020年25期
张萌
摘 要:本文主要对Delta并联机器人本体尺寸及结构参数优化设计进行分析,在尺寸参数优化的基础上运用机器人学、多体动力学和结构拓扑优化方法进行综合分析,对机器人本体结构进行轻量化设计,以最大工作空间为优化目标,把工作空间内的全域工作灵活性作为约束条件,采用随机搜索的方法求解到最优结构参数。
关键词:Delta机器人;结构设计;参数优化
中图分类号:TP242文献标识码:A文章编号:1003-5168(2020)25-0027-02
Abstract: This paper mainly analyzed the size and structural parameter optimization design of delta parallel robot. On the basis of size parameter optimization, it used robotics, multi-body dynamics and structural topology optimization methods to carry out a comprehensive analysis. The lightweight design of the robot body structure was carried out with the maximum working space as the optimization objective and the global working flexibility in the workspace as the constraint the optimal structural parameters were obtained by random search.
Keywords: Delta robot;structure design;parameter optimization
Delta机器人是一种具有3个平动自由度的高速并联机器人[1],也是目前商业应用最成功的并联机器人之一。该并联机器人有较广阔的操作空间,适应多种应用场合,如轻工业中的包装、pick-and-place操作、医学手术等[2]。机器人尺寸、结构参数优化设定是个综合性很强的问题,需要考虑各个方面的要求,包括工作空间、灵活性、负载能力、条件数和刚度等,以确保机器人操作性能趋向最优。
1 Delta机器人杆长尺寸优化
与串联机器人相比,同样的机构尺寸,Delta机器人的工作空间较小,因此,设计时在机构特征尺寸确定下获得相对最大的工作空间是很必要的。本文采用无量纲的分析方法、几何法和代数法分析机器人的奇异性[3-4]。以并联机器人工作空间不受限为条件,将操作性最佳作为优化算法的目标,进行尺寸参数的计算,获得最佳杆长参数。
1.1 Delta机器人特征尺寸确定
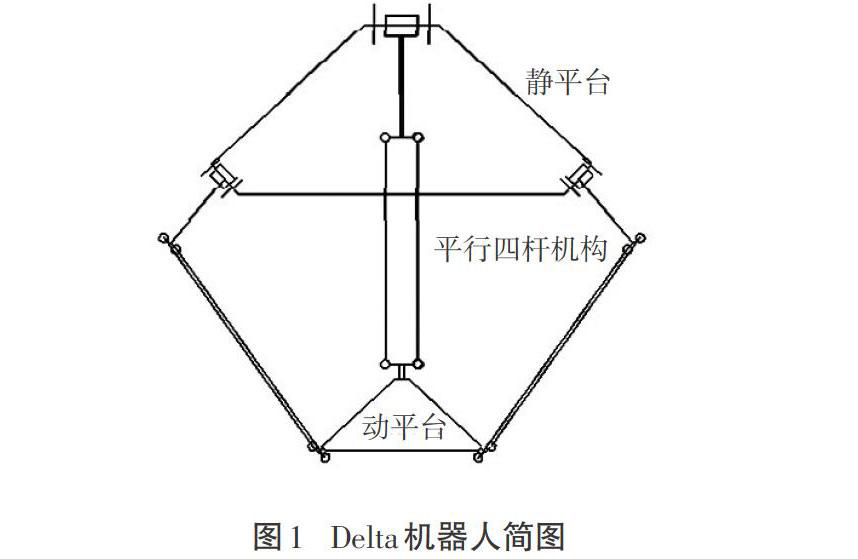
Delta机器人总体结构如图1所示。从图1可知,Delta机器人主要由静平台、动平台、平行四杆机构、转臂构成,机构只有三个平移自由度。Delta机器人的特征尺寸为动平台和静平台半径之差、回转半径以及平行四杆机构边长。
1.2 Delta机器人杆长优化设计
首先对其特征尺寸进行量化,并采用归一化思想将其特征长度之和定为一常值;然后建立坐标系,进行机构的位置反解,用代数形式表示特征长度,得到带参数的机器人逆解的解析解。
将各个关节转角从0°变化到360°,并求相应关节转角下的正解,其解集则为全域工作空间。由Delta机器人的运动学模型可得,只有当回转半径和平行四杆机构边长之和大于动、静平台半径之和时才有解,对工作空间不为空集的特征尺寸组合进行研究,并推导出单开链子空间曲面实体的体积公式。利用UG软件画出在特定特征参数组合下的工作空间,并利用软件自带的测量工具测出其几何体积,作为工作空间的表征参数。最后对不同杆长矢量的工作空间进行拓扑结构分类。
2 Delta机器人结构轻量化设计
在机器人本体设计上,过去主要依靠设计经验和分析校核方法反复进行设计,消耗大量时间和精力。本文结合机器人学、多体动力学和结构拓扑优化多学科综合分析,对机器人本体结构进行轻量化设计,主要采用Altair公司的HyperWorks软件作为优化工具,对机器人杆件和末端移动平台进行拓扑优化。由于拓扑优化设计属于概念设计的范畴,为了将拓扑形状应用于实际结构上,需要将拓扑优化结构与设计经验结合进行再次设计。通过改变连接节点的位置,进行多种方案的分析与计算,得到最优的结构。采用拓扑优化方法中的渐进结构方法,其基本思想是通过去除低效和无效的材料,得到优化后的结构,这种拓扑优化方法具有较好的通用性。以连杆机构上的杆件及动平台和静平台各自作为设计区域,如此划分可使得每个区域都有比较简单的形状,以简化有限元模型的建立,利于进行拓扑优化,减小优化过程中的计算量。以重量最轻作为优化设计问题,并由此建立拓扑优化的数学模型。
3 Delta机器人结构参数优化
Delta机器人结构参数的设计优化是比较复杂的问题,其不仅涉及多维度,而且是非线性多约束的结构参数优化计算问题,所以采用的优化计算方法也不同于一般优化方法。针对并联机器人,将最大工作空间作为计算目标,采用随机搜索法以工作空间中的工作灵活性为条件进行约束求解最优解。这种计算方法的特点是,前期优化搜索速度快,随着越来越接近最优目标,速度反而减慢。此外,还有另外一种优化方法,首先规定一个满足实际运动需要的工作空间,如圆柱形工作空間、方形工作空间,并在此工作空间内设计性能指标,再加上在该工作空间内的一些性能约束条件进行总体结构参数优化。对于Delta并联机人的优化问题,首先给定一个正方形工作空间区域,该区域包含在工作空间中,在该区域边界点处功率的最大值和最小值的均值作为优化机械臂的目标,以末端操作点始终在该区域内为约束条件,最终利用遗传算法对该机械臂进行参数优化,获得较优的结构参数。
4 结语
本文研究了Delta机器人并联机构的参数优化方法,结合机器人学、多体动力学和结构拓扑优化多学科综合分析,对机器人本体结构的特征尺寸及轻量化设计方面进行优化,在杆长尺寸优化的基础上,提出通过机器人运动工作空间约束条件,再加上基于运动动作要求的约束条件进行总体结构参数优化,最终获得最优的机器人主要几何参数和结构参数。优化后的机器人结构参数与现有产品尺度比例基本一致,说明优化设计的算法是可行合理的。
参考文献:
[1]王旭同,方坤,褚立峰,等.Delta并联机器人的参数优化设计研究[J].煤矿机械,2005(7):38-40.
[2]方坤.Delta并联机器人的参数优化设计研究[J].教育教学论坛,2010(14):101-102.
[3]南文虎,宋宝,唐小琦.基于最大工作空间的DELTA机器人尺寸综合与优化[J].组合机床与自动化加工技术,2014(7):38-41.
[4]宫赤坤,欧阳辉,余国鹰,等.Delta并联机器人参数优化设计[J].现代制造工程,2015(7):26-29.
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
理科爱好者(教育教学版)(2022年2期)2022-05-05
科学与财富(2021年36期)2021-05-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
神州·上旬刊(2017年9期)2017-10-15
筑路机械与施工机械化(2016年11期)2017-02-05
科教导刊·电子版(2016年30期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
科技视界(2016年23期)2016-11-04
