一种智能化办公桌椅的结构设计及其运动仿真
2020-11-10 04:40毕大品黄金桂卢艳管佳程李朱锋
科技风 2020年29期
毕大品 黄金桂 卢艳 管佳程 李朱锋


摘 要:现如今,智能化家具的发展已成为了一种新趋势。本文以人机工程学、美学的理念为设计元素,设计出一种集“办公—休闲—健康”三位一体的智能化办公桌椅,通过对其运动分析达到两种模式五种状态,最后采用PLC控制实现智能化办公桌椅的配合使用。
关键词:办公桌椅;结构设计;运动仿真
1 绪论
随着智能化技术的不断进步,而智能化办公家具的发展成为了一种趋势。普通的办公桌椅功能过于单一,并且久坐危害健康,本文以人机工程学、美学的理念为设计元素,设计出一种适合那些追求时尚的白领人群、学生、小户型住户的“旋式”升降的集“办公—休闲—健康”三位一体的智能化办公桌椅,并利用PLC准确地控制執行部件完成所需要的动作,实现办公模式和休闲模式的相互转化。
2 功能分析
本次设计的智能化办公桌椅分工作和休闲两种模式,可以实现坐、站、躺三种姿势的相互转换,这样不但可以极大地提高人们的工作效率,而且也方便人们的日常生活。
其办公模式有三种状态:(1)办公桌单独使用,将桌面升高,使人站着工作保持舒服状态;(2)桌椅的配合,气缸未升高时,桌面呈水平静止状态,此时人可以坐着进行办公;(3)桌椅的配合,气缸升高时,前桌腿的部分桌面足够人正常办公。
其休闲模式有两种状态:(1)单独使用智能化办公椅,人躺在椅子上便可以达到理想的舒适状态;(2)桌椅的配合使用,调整桌面的高度和倾斜角度,满足各类人的舒适需求。
3 新型智能化办公座椅的设计
3.1 智能办公桌的设计
智能化办公桌主要由前桌腿、后桌面、后腿柱和连接部件四部分组成,前桌腿与后桌面由连接轴连接,而后桌面与后腿柱是通过连接部分导轨和联结件配合连接。如图1所示。
由《中国成年人人体尺寸》标准(GB/T 10000—1988),桌子的设计尺寸如图2所示。
3.2 智能化办公椅的设计
由上面的坐姿研究以及人机工程学和美学理念的设计元素,智能化办公椅的组成结构主要包括坐垫、靠背、扶手、腿靠和传动部分,如图3所示。
由《中国成年人人体尺寸》标准(GB/T 10000—1988),椅子的设计尺寸如图4所示。
4 智能化办公桌椅的配合模式分析
该智能化办公桌椅分两种模式,其中办公模式根据坐、站三种不同情况可分为三种办公状态,休闲两种模式根据坐、躺两种不同情况可分为两种休闲状态,共计五种状态从而可以实现坐、站、躺三种状态,办公和休闲两种模式的相互转换,不但可以极大的提高人们的工作效率,而且也方便人们的日常生活。
4.1 办公状态一
根据人体工程学保证坐垫与靠背之间的夹角在95°到105°范围内,可使座椅处于办公状态气缸未升高时,适当调整桌椅距离,保证人在办公时眼睛到物体的距离在500mm以内,以便人在工作时达到最舒服的坐姿状态。桌面呈水平静止状态,如图5的左图。此时,人可以坐到椅子上进行正常的办公,桌面上还内嵌有一个大支撑板可以拉开,以便支撑书籍、资料、笔记本电脑等,它的旋转角度范围在0°到120°之间,能够根据人体的需要进行有效调整,如图5的右图所示。
4.2 办公状态二
当前桌腿的部分桌面足够人正常地处理一些文件时,可适当升高气缸,升高的后桌面除了可以起到支撑的作用外,还可以用于粘贴工作时的资料或者用来提醒自己需要做的事项的便利贴等,还可以进行专业的图纸绘制等工作,如图6的左图所示。
此外,可以利用内嵌在后桌面的大支撑板的背面进行支撑,将它水平放置,可以支撑笔记本电脑。如图6的右图所示。
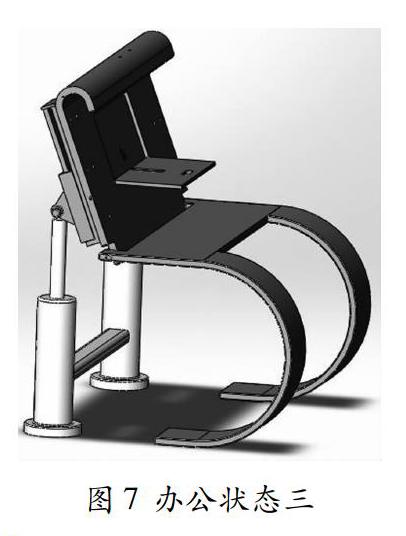
4.3 办公状态三
长期坐着工作会对身体健康带来很大的伤害,所以本文设计站立办公状态。将桌面升高,大支撑板与地面的高度在1020mm左右,符合人机工程学,使人站着工作保持舒服状态,如图7所示。
4.4 休闲状态一
第一种休闲状态单独使用智能化办公椅,调整靠背与椅面的角度在110°到120°之间,此时按照人机工程学原理,人躺在椅子上便可以达到理想的舒适状态,实现较好的休闲功能,如图8所示。
4.5 休闲状态二
除休息状态外,还可以进行娱乐活动。在休闲状态一的基础上,与智能化办公桌配合,调整桌面的高度和倾斜角度,以此来满足各类人的舒适需求。
当桌面未升高时,利用大支撑板支撑笔记本电脑、平板电脑或手机等,如图9的左图所示。当桌面升高后,可以用后桌面和大支撑板来支撑笔记本电脑、平板电脑或手机等,如图9的中图和右图所示。此时,人可以躺在椅子上,观看桌面上笔记本电脑放的电视剧、电影、综艺等节目,达到休闲娱乐的效果。
5 智能化办公桌椅的运动分析
5.1 运动仿真分析
根据上一节智能化办公桌椅的两种模式的介绍,利用SolidWorks制图软件的运动仿真来分别实现智能化办公桌椅两种模式的转换。
5.2 桌子的运动仿真
桌子的运动过程是由气缸进气口进气,从而推动活塞杆向上运动,带动联结件在与桌面相连的导轨上来回移动,进而推动桌面上升移动。
对桌子进行了运动仿真,由图10可知,在活塞杆上加了一个相对于气缸向上运动的线性马达,使它以50mm/s的匀速度向上运动,从而实现后桌面的抬起。例如,后桌面水平状态时的高度为760mm,活塞杆以50mm/s的匀速推动后桌面上升,运行5秒后,此时后桌面打开大支撑板呈水平状态后距离地面的高度为1010mm,达到人站立工作的要求。图11为桌子的速度时间图。
5.3 椅子的运动仿真
椅子的运动过程是以靠背和坐垫的连接轴为轴心进行转动,椅背带动与之连接的曲杆,进而使曲杆带动滚轮在腿靠背的轨道上往返移动,从而撑起腿靠,达到座椅变躺椅的目的。
图12和图13是座椅到躺椅转动的起始图和最终图,对座椅进行运动仿真,由图14可得,在靠背和坐垫的连接轴上加了一个相对于坐垫向后运动的旋转马达,设定转速为1RPM实现等速转动,当转动5s后,椅子靠背的背倾角从104°的工作状态向后转动20°,背倾角变为124°,达到休闲状态,从而实现座椅的运动仿真。图15为旋转马达的转速时间图。
5.4 智能化办公桌的PLC控制
智能化办公桌的运动是通过气缸的升降实现的,气缸阀门与PLC控制器连接,按钮开关给PLC控制器发送指令来控制气动阀门,从而推动活塞杆向上运动,带动联结件在导轨上移动,抬升桌面,最终达到理想高度。
智能化办公椅的运动是连接轴的转动,按钮开关给PLC控制器发送指令来控制连接轴,带动曲杆转动,从而推动滚轮使小腿坐垫部分升起,最终实现座椅变躺椅的动作,達到舒适状态。
6 结语
本文通过对互联网时代下办公形态的研究,了解人们对智能化办公桌的需求,以人机工程学、美学的理念为设计元素,在制图软件SolidWorks2015上设计出桌子和椅子的模型。在反复修改调整之后,最终设计出智能化办公气缸桌和智能化办公躺椅。桌椅进行配合使用能够实现办公模式和休闲模式两种状态,达到“办公—休闲—健康”三位一体的效果。
参考文献:
[1]马猛猛.PLC在步进电机控制中的应用探究[J].科技创新与应用,2019(01):161-162.
[2]陈劲松.西门子PLC在变频调速电机的应用[J].技术与市场,2019,26(02):161.
[3]史国生.电气控制与可编程控制器技术[M].北京:化学工业出版社,2003.
[4]张浩.PLC控制系统抗干扰能力的优化措施[J].信息记录材料,2019,20(01):98-99.
[5]毛昀,杨峰.基于PLC的步进电机控制系统设计[J].工业仪表与自动化装置,2014(04):87-89+98.
[6]肖礼志,黄美发,刘夫云.基于SolidWorks的尺寸公差参数化设计方法[D].计算机系统应用,2011,(09):210-213.
[7]索超,李玉翔,林树忠.基于VB语言对SolidWorks参数化设计的二次开发[J].制造业自动化,2013,(15):137-140.
[8]吴文根.基于SolidWorks的产品设计专用系统的研究与开发[D].武汉理工大学,2007.
[9]胡寿松.自动控制原理[M].北京:国防工业出版社,1987.
基金项目:江苏省高等学校大学生创新创业训练计划项目:基于PLC的新型智能办公桌椅的设计(201712056011Y)
作者简介:毕大品(1995—),男,汉族,江苏镇江人,本科,研究方向:机械结构设计。
通讯作者:李朱锋(1989—),男,汉族,江苏南通人,硕士,讲师,主要研究方向:工程力学与机械结构设计。
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
理科爱好者(教育教学版)(2022年2期)2022-05-05
科学与财富(2021年36期)2021-05-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
神州·上旬刊(2017年9期)2017-10-15
汽车科技(2016年6期)2016-12-19
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26
现代经济信息(2009年8期)2009-02-03