
基于时滞反馈控制的1/4车辆模型乘客减振研究
2020-11-24 08:21吴凯伟任传波曹军帅孙志钏
科学技术与工程 2020年29期
吴凯伟, 任传波, 吕 浩, 曹军帅, 孙志钏
(山东理工大学交通与车辆工程学院, 淄博 255000)
汽车长时间行驶在不平坦的路面时引起的垂直方向的振动会损伤汽车的零部件,同时这种状况会给乘客带来严重的健康问题[1],悬架系统的设计、开发和控制算法的应用都是为了实现乘客乘坐舒适性和车辆平顺性。与被动悬架相比,主动悬架有实时改变阻尼的特性让悬架系统时刻处于最佳的阻尼力[2-3],但是随着主动控制技术的应用,不论是什么样的控制问题,都要通过传感器采集信号,控制器分析信号并对作动器发出指令实现控制,在这些过程中难免会产生“时滞”,在控制系统中时滞已经成为不可避免的问题。
现运用时滞反馈控制理论,提出时滞反馈控制在3自由度1/4车模型中乘客减振中研究,通过异步学习因子粒子群算法确定反馈增益和时滞量,并提出频域扫描法对时滞反馈参数进行稳定性分析,通过建立被动悬架和含时滞的主动悬架模型进行模拟仿真,验证含时滞反馈控制的主动悬架系统在提高乘坐舒适性和行驶平顺性方面的效果。
1 1/4车辆主动悬架模型的建立
图1所示含时滞反馈控制的1/4车辆主动悬架模型,设计的该车辆模型有3个自由度,具有所研究问题的所有基本特性。该结构的部件包括乘客质量、车身质量和车轮质量。该1/4车辆模型主要用于主动悬架和被动悬架系统的性能评估。车辆悬架模型参数如表1所示。
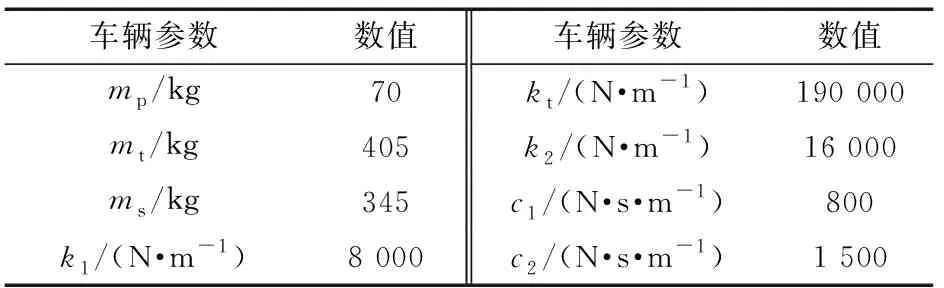
表1 车辆悬架模型参数Table 1 Vehicle suspension model parameters
根据拉格朗日法对1/4车辆模型列动态方程:

(1)
k2(x2-x3)+fr=0
(2)

(3)
式中:fr=gx3(t-τ),g和τ分别表示反馈增益和时滞量;t为时间。
1.1 系统控制模型的建立
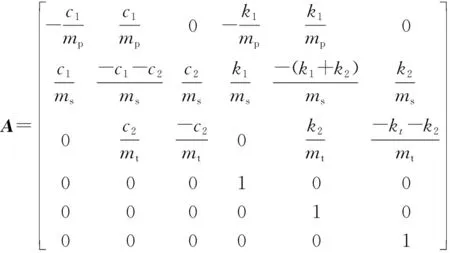
根据车辆的悬架性能指标和乘客舒适性性能指标,选取状态变量定义以下状态空间方程:
(4)
1.2 优化目标函数的建立
为提高乘客舒适性和汽车平顺性,使用新的建立目标函数的方法,通过对式(1)~式(3)求解,得到系统各时间点的动力响应为
(5)
将各个时间点的动力响应代入式(1)~式(3)得:
(6)
求得乘客座椅、车身、轮胎在各个时间点对应的加速度,以此在优化的过程中可以得到不同时间点的优化结果,即最大程度上使目标函数最小化。
以车身加速度均方根、乘客加速度均方根、车身速度均方根加权作为优化目标评价函数J,以最大限度地提高乘客的舒适性和汽车的平顺性。

(7)
1.3 时滞参数确定
粒子群优化算法(particle swarm optimization, POS)[16]是一种进化计算技术(evolutionary computation),源于对鸟群捕食的行为研究。PSO算法是一种基于迭代的优化工具。系统初始化为一组随机解,通过迭代搜寻最优值,粒子间具有信息共享机制,gbest(粒子群经历过的最优位置)或pbest(粒子本身经历过的最优位置)将信息传递给其他粒子,相向流动,搜索跟新跟随最优解,收敛速度快。根据目标函数的特点,使用具有异步变化学习因子的粒子群算法。
1.3.1 算法原理
学习因子在优化过程中随时间的变化而变化,这样使得在优化的初期,粒子具有较大的自我学习能力和较小的社会学习能力,加强全局搜索能力,在优化后期,粒子具有较大的社会学习能力和较小的自我学习能力,有利于收敛到全局最优解。学习因子的变化公式为

(8)
式(8)中:c1,ini、c2,ini分别代表c1、c2的初始值;c1,fni、c2,fni分别代表c1、c2的迭代终值。
1.3.2 异步学习因子粒子群算法的基本步骤
(1)随机初始化种群中各微粒的位置和速度。
(2)评价每个微粒的适应度,将当前各微粒的位置和适应度储存在各微粒的pbest中,将所有pbest中适应最优个体的位置和适应存储于gbest中。
(3)用式(9)更新粒子的速度和位移。
(9)
(4)更新学习因子[式(8)]。
(5)对每个微粒,将其适应值与其经历过的最好位置做比较,如果较好,则将其作为当前的最好位置,比较当前所有phest和gbest的值,更新gbest。
(6)若满足停止条件,搜索停止,输出结果;否则返回(3)继续搜索。在优化过程中,取粒子数60,c1,fin取0.5,c1,ini取2.5,c2,fin取2.5,c2,ini取0.5,惯性权重取0.9,迭代步数取150次,分别得到简谐激励和随机激励下的最优控制参数:g1=18 815 N/m,τ1=0.868 0 s,g2=-32 609 N/m,τ2=0.993 0 s。适应度函数迭代优化的变化如图2所示。
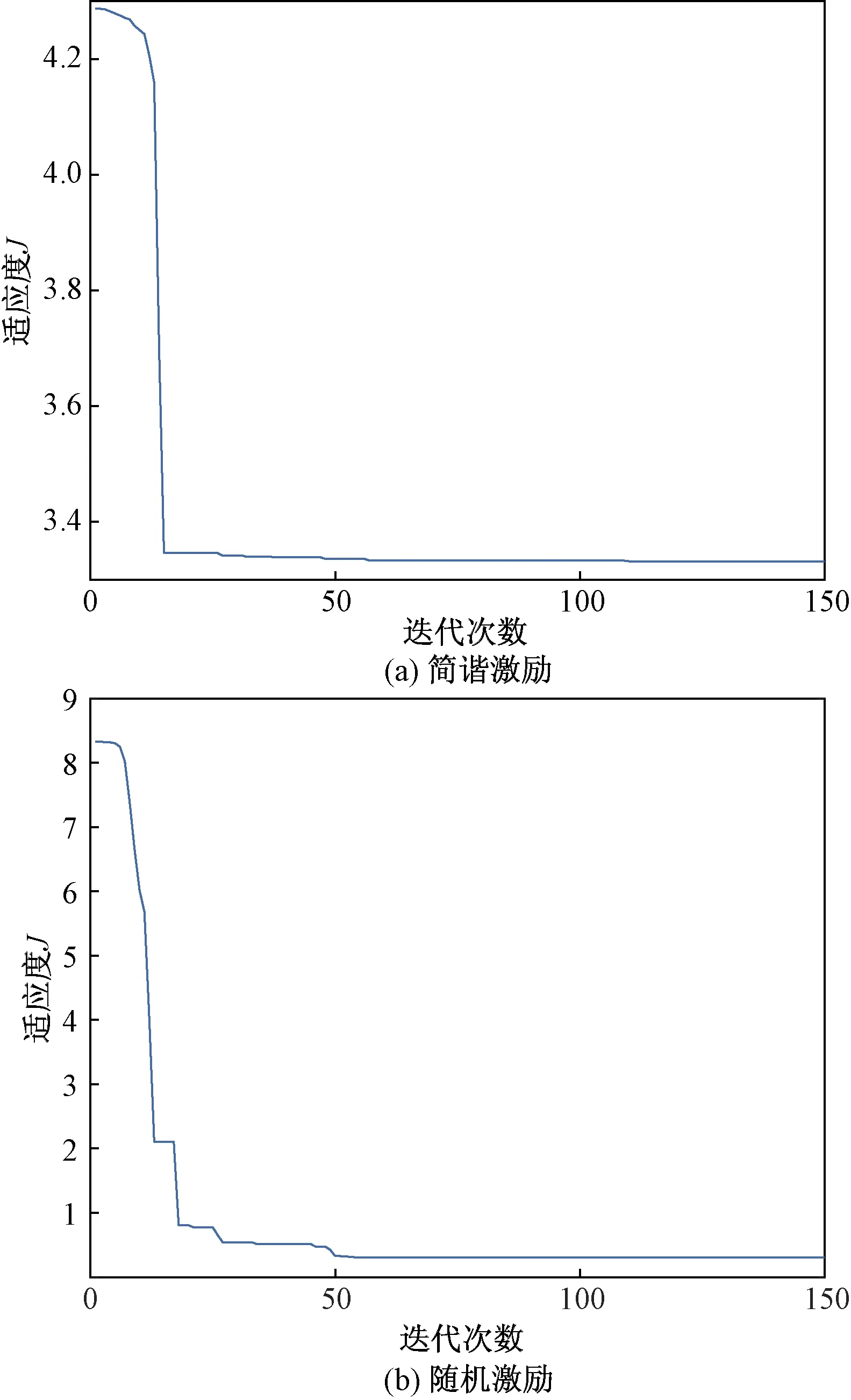
图2 适应度函数变化Fig.2 Variation of fitness function
2 稳定性分析
时滞反馈控制系统的稳定性分析非常重要,为了确保控制系统的稳定,选用频域扫描法对系统进行稳定性分析[17]。
首先把式(1)~式(3)改写为时滞方程的一般形式:

(10)

由式(10)可得系统的特征方程为
det(sI-A-Be-τs)=0
(11)
s和z的特征方程具体形式为

(12)
式(12)中:a0=c6s6+c5s5+c4s4+c3s3+c2s2+c1s1+c0;a1=c4s4+c3s3+c2s2+c1s1+c0;z=e-τs;c为特征方程的常系数。
进一步,在式子中a0和a1存在连续的多项式Gl(s)(l=1,2,…,n)满足状态方程并可等价为
CE(s,z)=a1[z+Gl(s)]a0=
k=0,1
(13)
式(13)中:Gl(s)满足:

(14)
由于s和z为复数,CE(s,z)=0时,多项式z+Gl(s)为0。
通过频域扫描基本定理对优化出简谐激励下的时滞参数g1=18 815 N/m,τ1=0.868 0 s进行稳定性分析。当时滞等于零时方程的特征根为(-4.385 3×105+4.608 1×105i),则特征方程的所有特征根均位于复平面的左半开面,即方程没有非负实部的特征根,则控制系统是稳定的。当时滞不为0时通过频域扫描法确定z1的模与频率的关系找到交叉频率,图3(a)系统的交叉频率为w1=6.338 3,将s=6.338 3 i代入特征方程得(-0.835 2-0.550 0i),这样就可以得到w1对应的时3.141 6+2rπ/6.338 3,r=0,1,…,。由于时滞为零时系统是稳定的,即这个系统τ1∈(0,3.141 6)时是渐近稳定的。
进行频域扫描法分析得到了z2的模与频率的关系,如图3(b)所示,求得交叉频率w2=19.646 5,即时滞的稳定区间τ2∈(0,4.893 7)。
图3 特征方程中z1、z2的模Fig.3 Modulus of z1,z2 in the characteristic equation
3 仿真结果分析
3.1 简谐激励下的仿真分析
将通过异步学习因子粒子群算法优化出来的时滞参数代入式(1)~式(3)中,对简谐激励xgf=0.05sin(6.6t)作用下乘客和车身振动响应进行仿真,分析1/4车模型在被动悬架系统和含时滞反馈的主动悬架系统在时域状态下的振动响应特性,其仿真结果如图4所示。
图4 简谐激励下仿真对比Fig.4 Simulation comparison under harmonic excitation
从图4的仿真结果以及经过20 s的时域计算得到的乘客舒适性和车辆平顺性的评价指标的均方根如表2所示,与被动悬架相比,根据图4(a)、图4(b)得出含时滞反馈的主动悬架车身加速度和乘客加速度的均方根分别从2.470 6、3.190 1减小到0.324 6、0.423 3,减小比例为86.70%、86.73%;图4(c)车身速度的均方根值从0.565 0减小到0.061 3,减小比例为89.15%,图4(d)乘客速度的均方根从0.420 9减小到0.018 2,减小比例为88.55%,图4(e)车身位移的均方根从0.057 1减小到0.008 9,减小比例为84.41%,图4(f)乘客位移的均方根从0.073 6减小到0.011 0,减小比例为85.05%。
表2 平顺性指标均方根值Table 2 Roughness index root mean square value
车身加速度和乘客加速度是衡量车辆平顺性和乘坐舒适性的重要指标,当外界激励频率等于系统固有频率时,时滞反馈控制系统可以完全消除系统的振动,从仿真结果可见,在简谐激励下,含时滞反馈控制的主动悬架明显地吸收了外界对系统的振动,使乘客舒适性和汽车平顺性得到明显的提升。
3.2 随机激励下仿真分析
为进一步研究含有时滞反馈控制的主动悬架的减振效果,模拟车辆以20 m/s速度行驶,某汽车悬挂系统的参数如表1所示,对1/4车模型在路面激励下振动响应进行仿真。仿真结果有助于分析含时滞反馈控制的主动悬架在汽车平顺性和乘客舒适性的性能。
现实生活中,路面表现出随机性,具有不可预测的不平度分布,路面激励对车辆的动态响应及乘客的乘坐舒适性有强烈影响,即选取路面激励作为对轮轴的垂向扰动。在这里采用正弦函数叠加的方法建立路面的时域模型,图5显示了相应的拟合模型,随机路面由下列数学方程生成:
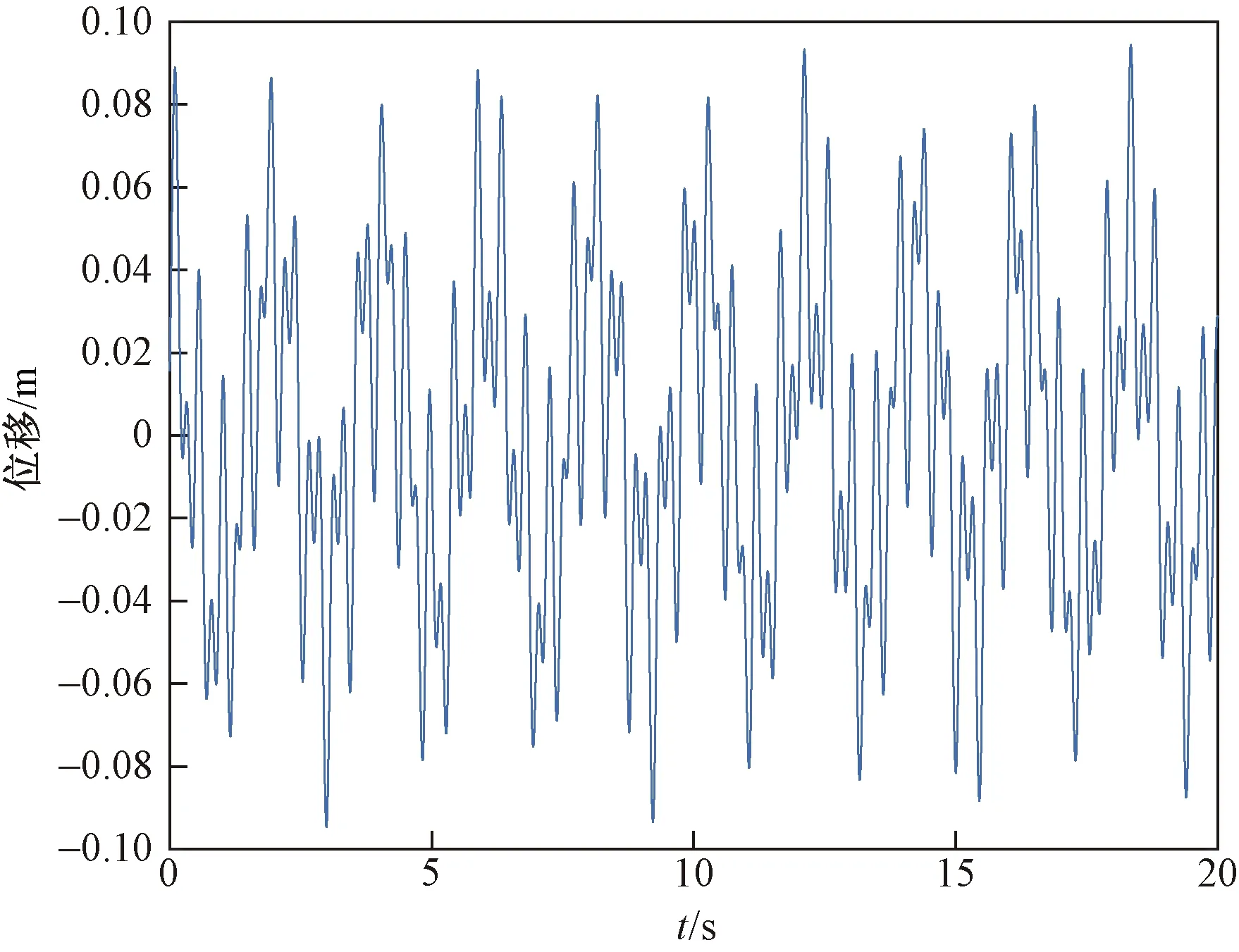
图5 路面激励的时域模型Fig.5 Time-domain model of road excitation
(18)
式(18)中:φ为幅值;ω为等效频率;θ为(0,2π)上随机分布的数值。
同样将优化出的时滞参数代入到式(1)~式(3)中,在路面激励下时域的仿真结果如图6所示。
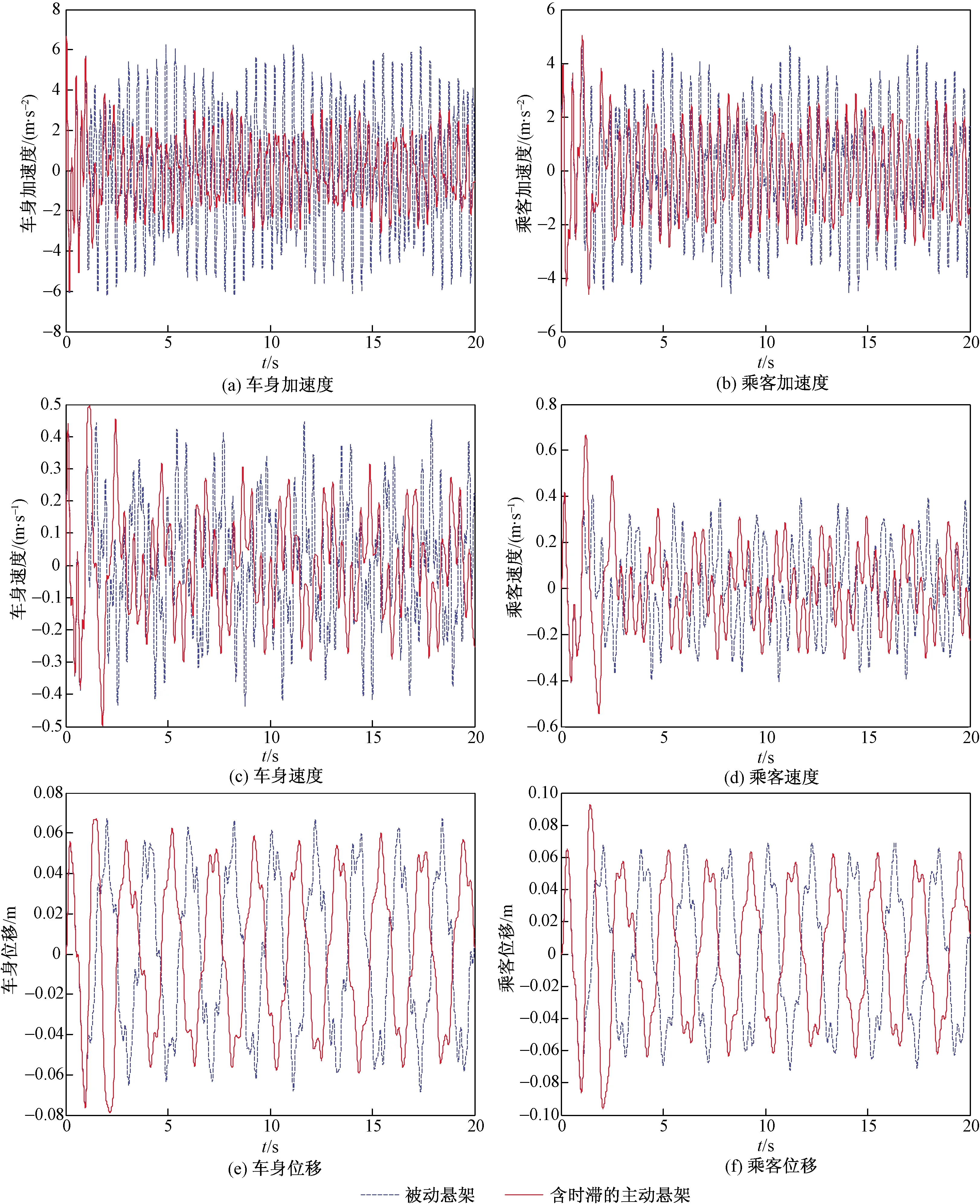
图6 路面激励下仿真对比Fig.6 Simulation comparison under road excitation
从图6路面激励的仿真图及表3的平顺性指标可以得出,与被动悬架相比,根据图6(a)得出出含时滞反馈控制的主动悬架车身加速度均方根从1.893 7降到1.096 6,减小比例为42.09%,图6(b)乘客加速度均方根从1.465 0降到1.107 3,减小比例为24.42%,图6(c)车身速度均方根从0.038 5降到0.035 9,减小比例为6.75%,图6(d)乘客速度均方根从0.041 8降到0.039 0,减小比例为6.70%,图6(e)车身位移均方根从0.127 4降到0.107 1,减小比例为15.93%,图6(f)乘客位移均方根从0.120 6降到0.112 5,减小比例为6.72%。
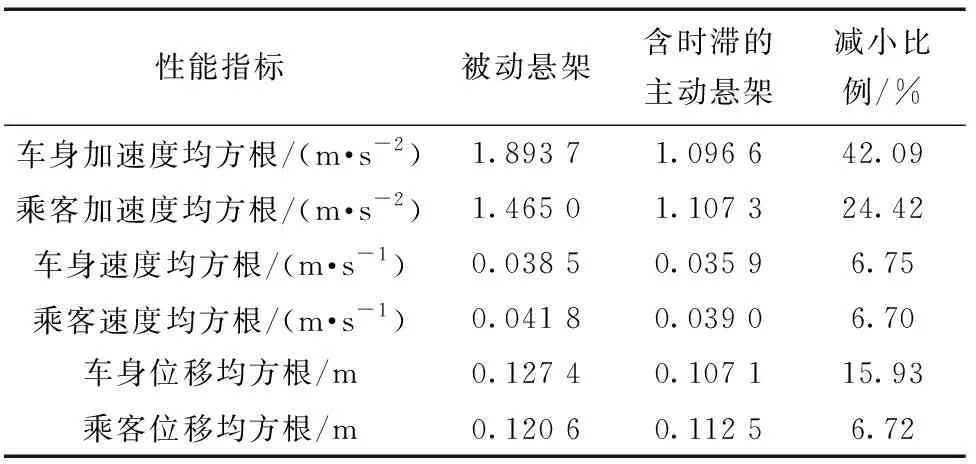
表3 平顺性指标均方根值Table 3 Roughness index rms value
在路面激励下,根据仿真结果车身和乘客加速度同样有明显的降低,车身和乘客的速度、位移也得到了不同程度的下降,提高了乘坐的舒适性和车辆平顺性,验证了含时滞反馈控制的主动悬架在路面激励下同样有较好的减振效果。
4 结论
将时滞反馈控制应用到1/4车乘客减振中,通过仿真分析得到以下结论。
(1) 针对3自由度车辆主动悬架系统,将优化变量各个时间点处动力响应的均方根值加权作为优化目标函数,并提出了频域扫描法确定稳定区间。
(2) 对于时滞参数的优化建立了异步学习因子粒子群算法,然后运用频域扫描法确保系统的稳定性。仿真结果表明,无论在简谐激励还是路面激励下,乘客的加速度和车身加速度都得到了明显的降低,振动得到明显的抑制,达到了预期的效果。
因此,含时滞反馈控制的主动悬架减振效果明显,对改善乘客的乘坐体验和车辆行驶期间平顺性有很大的帮助。
猜你喜欢
环境技术(2022年1期)2022-03-21
汽车工程师(2021年12期)2022-01-17
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
北京航空航天大学学报(2020年10期)2020-11-14
今日农业(2019年12期)2019-08-15
飞天(2019年6期)2019-07-08
北方工业大学学报(2019年5期)2019-03-30
上海师范大学学报·自然科学版(2018年3期)2018-05-14
新高考·高二数学(2015年2期)2015-05-27
新高考·高二数学(2014年7期)2014-09-18
